在Win7系统中,用户为了方便查看文件喜欢在桌面上创建文件夹,但是不少用户会遇到这个问题:在Win7桌面不能新建文件夹,也无法修改文件名,系统弹出目标文件夹访问被拒绝的窗口,提示需要权限来执行操作,而且打来文档编辑后保存却变成另存为了。这该怎么办?遇到这种问题该怎么解决呢?

解决方法:
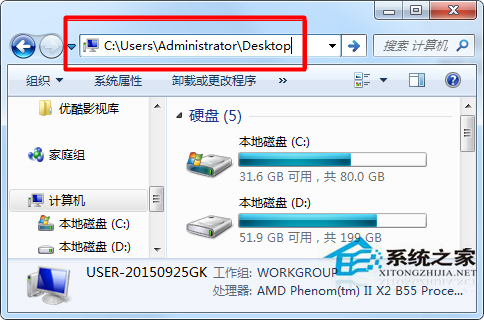
1、打开“计算机”,将Win7系统桌面路径复制粘贴到地址栏中,如C:\Users\Administrator\Desktop (其中Administrator更改为你自己有登录帐户名,以下操作也一样),然后回车;
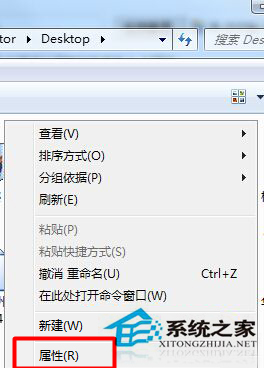
2、回车后我们就定位到了桌面文件夹,在空白的地方点击右键,然后属性;
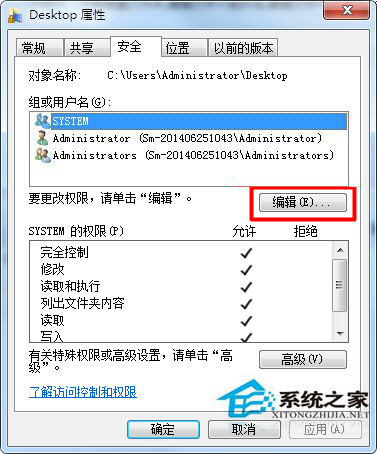
3、在Desktop中,点击“安全”标签,切换到安全选项卡,并点击编辑按钮,如下图;
4、然后选择你登录的帐户名如Administrator,将“用户名”权限设置为“完全控制“,并点击应用选项;
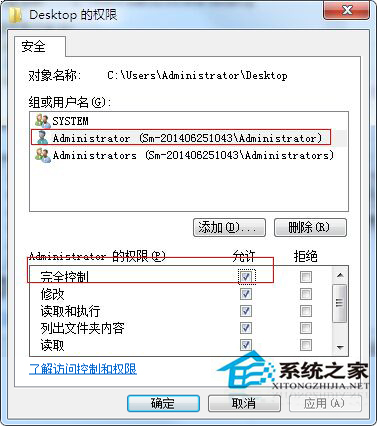
5、这时系统会自动将桌面的权限及子目录的权限设置为完全控制,自然该故障就修复了。
以上就是Win7桌面不能新建文件夹也无法修改文件名的解决方法,由于这个问题是登录帐户没有对Win7桌面的写入权限引起的,通过上面的步骤设置后就能解决Win7桌面不能新建文件夹也无法修改文件名的问题了。