欧拉角(Euler Angles)用来描述坐标轴的旋转。
- 坐标轴

原始坐标轴记为 x − y − z x-y-z x−y−z,旋转后坐标轴记为 X − Y − Z X-Y-Z X−Y−Z,坐标轴原点记为 O O O。 N ⃗ \vec{N} N轴为 X Y XY XY与 x y xy xy两平面的交线, N ⃗ = z ⃗ × Z ⃗ \vec{N}=\vec{z}\times\vec{Z} N=z×Z。
| 旋转后坐标轴 | 方向余弦 |
|---|---|
| X ⃗ \vec{X} X | l 1 l_1 l1 m 1 m_1 m1 n 1 n_1 n1 |
| Y ⃗ \vec{Y} Y | l 2 l_2 l2 m 2 m_2 m2 n 2 n_2 n2 |
| Z ⃗ \vec{Z} Z | l 3 l_3 l3 m 3 m_3 m3 n 3 n_3 n3 |
则有
{ x = l 1 X + l 2 Y + l 3 Z y = m 1 X + m 2 Y + m 3 Z z = n 1 X + n 2 Y + n 3 Z \begin{cases} x = l_1X + l_2Y + l_3Z \\ y = m_1X + m_2Y + m_3Z \\ z = n_1X + n_2Y + n_3Z \end{cases} ⎩⎪⎨⎪⎧x=l1X+l2Y+l3Zy=m1X+m2Y+m3Zz=n1X+n2Y+n3Z
- 欧拉角
旋转后坐标轴可用三个欧拉角确定。
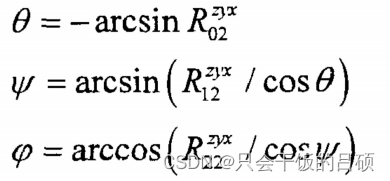
- 章动角 θ \theta θ( β \beta β)为 Z ⃗ \vec{Z} Z与 z ⃗ \vec{z} z两轴正向夹角, 0 ≤ θ < π 0\leq\theta<\pi 0≤θ<π。
- 进动角 ψ \psi ψ( α \alpha α)为 N ⃗ \vec{N} N与 x ⃗ \vec{x} x两轴的夹角, 0 ≤ ψ < 2 π 0\leq\psi<2\pi 0≤ψ<2π;面对 z ⃗ \vec{z} z轴正向, ψ \psi ψ按逆时针方向从 x ⃗ \vec{x} x轴开始计算。
- 自转角 φ \varphi φ( γ \gamma γ)为 N ⃗ \vec{N} N与 X ⃗ \vec{X} X两轴的夹角, 0 ≤ φ ≤ 2 π 0\leq\varphi\leq2\pi 0≤φ≤2π;面对 Z ⃗ \vec{Z} Z轴正向, φ \varphi φ按逆时针方向从 X ⃗ \vec{X} X轴开始计算。
若设
c 1 = cos θ , c 2 = cos ψ , c 3 = cos φ s 1 = sin θ , s 2 = sin ψ , s 3 = sin φ \begin{array}{ccc} & c_1 = \cos\theta, & c_2=\cos\psi, & c_3=\cos\varphi \\ & s_1 = \sin\theta, & s_2=\sin\psi, & s_3=\sin\varphi \end{array} c1=cosθ,s1=sinθ,c2=cosψ,s2=sinψ,c3=cosφs3=sinφ
则
l 1 = c 2 c 3 − c 1 s 2 s 3 , m 1 = s 2 c 3 − c 1 c 2 s 3 , n 1 = s 1 s 3 l 2 = − c 2 c 3 − c 1 s 2 c 3 , m 2 = − s 2 s 3 − c 1 c 2 c 3 , n 2 = s 1 c 3 l 3 = s 1 s 2 , m 3 = − s 1 c 2 , n 3 = c 1 \begin{array}{ccc} l_1 = c_2c_3-c_1s_2s_3, & m_1=s_2c_3-c_1c_2s_3, & n_1=s_1s_3 \\ l_2 = -c_2c_3-c_1s_2c_3, & m_2=-s_2s_3-c_1c_2c_3, & n_2=s_1c_3 \\ l_3 = s_1s_2, & m_3=-s_1c_2, & n_3=c_1 \end{array} l1=c2c3−c1s2s3,l2=−c2c3−c1s2c3,l3=s1s2,m1=s2c3−c1c2s3,m2=−s2s3−c1c2c3,m3=−s1c2,n1=s1s3n2=s1c3n3=c1
变换行列式
△ = ∣ l 1 l 2 l 3 m 1 m 2 m 3 n 1 n 2 n 3 ∣ = ± 1 \triangle= \left|\begin{array}{ccc} l_1 & l_2 & l_3 \\ m_1 & m_2 & m_3 \\ n_1 & n_2 & n_3 \end{array} \right| =\pm1 △=∣∣∣∣∣∣l1m1n1l2m2n2l3m3n3∣∣∣∣∣∣=±1
当右手系变为右手系(或者左手系变为左手系)时, △ = 1 \triangle=1 △=1;当右手系变为左手系(或者左手系变为右手系)时, △ = − 1 \triangle=-1 △=−1
参考:《数学手册》,高等教育出版社,1979