前言
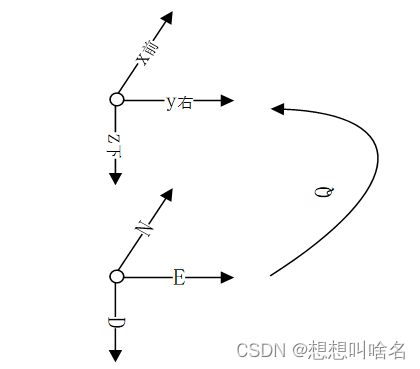
一般情况下,每个领域都有自己默认是欧拉角定义。经典力学使用zxz,航空航天使用zyx/zxy。本文以无人机为对象讲解,使用zyx/zxy旋转顺序。为什么不同专业选用的欧拉角不同呢?一个是传统,另一重要的原因是不同的转序和不同的轴对应的万向节死锁的位置是不一样的,因此每个专业都想把万向节死锁的位置安排在自己最不常用的位置。但是,无论哪一种欧拉角都是避免不了万向节死锁的。还有一个很容易被忽略却很重要的点,姿态和坐标轴的定义有非常大的关系,每个行业都有自己一套坐标轴的定义。比如航空领域中,滚转俯仰偏航角有明确的物理意义。如果对导航的定义是是北(x)东(y)地(z),那这种情况下,飞机本身的坐标系定义就必须是:前(x)右(y)下(z),转序就是zyx(321)。如果对导航的定义是是东(x)北(y)天(z), 那这种情况下,飞机本身的坐标系定义就必须是:右(x)前(y)上(z).转序就是zxy(312)。如果你不小心弄混了用错了,那你的小飞机必炸无疑。此段来源:https://zhuanlan.zhihu.com/p/98320567?utm_campaign=shareopn&utm_medium=social&utm_oi=1004315303668498432&utm_psn=1573824380391567360&utm_source=wechat_session
两种大地坐标系下的欧拉角
以北东地为地理坐标系,机体坐标系初始状态与导航坐标系重合。即有: 导航坐标系x轴指向正北方向,机头也朝向正北方向,此时对应航向为0度;先对 z轴进行旋转,根据右手定则,顺时针旋转为正,可以得到航向角Yaw;对y轴进行旋转,可得到俯仰角pitch;对x轴进行旋转可得到滚转角roll。因此,飞机姿态的描述与所选的地理坐标系有关。地理坐标系为北东地时,姿态描述如图1所示按先航向,再俯仰再滚转的旋转顺序来讲,旋转轴为ZYX。
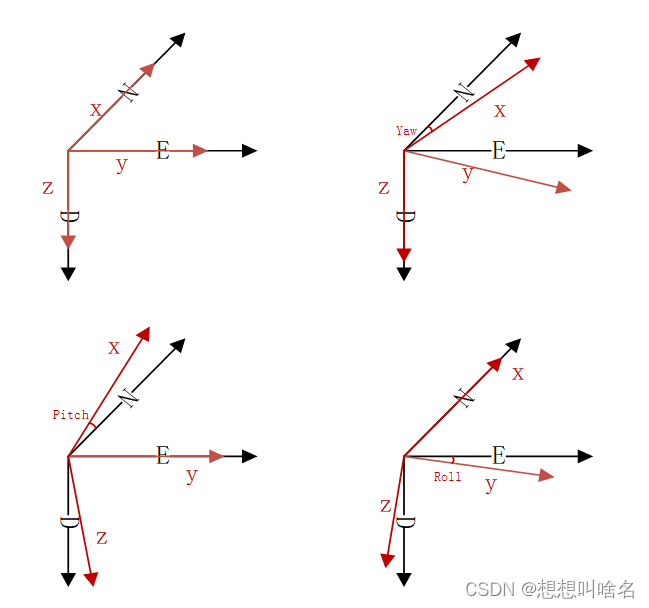
图1 北东地地理坐标系
此时,若以东北天为地理坐标系,机体坐标系初始状态与导航坐标系重合。即有: 导航坐标系y轴指向正北方向,机头也朝向正北方向,此时对应航向为0度;旋转z轴航向改变,得到航向角Yaw,与北东地不同的是,此时航向角以逆时针旋转为正;同理,分别绕x,y轴旋转,可以得到飞机的俯仰pitch、滚转roll。按先航向,再俯仰再滚转的旋转顺序来讲,旋转轴变为ZXY。如图2所示。
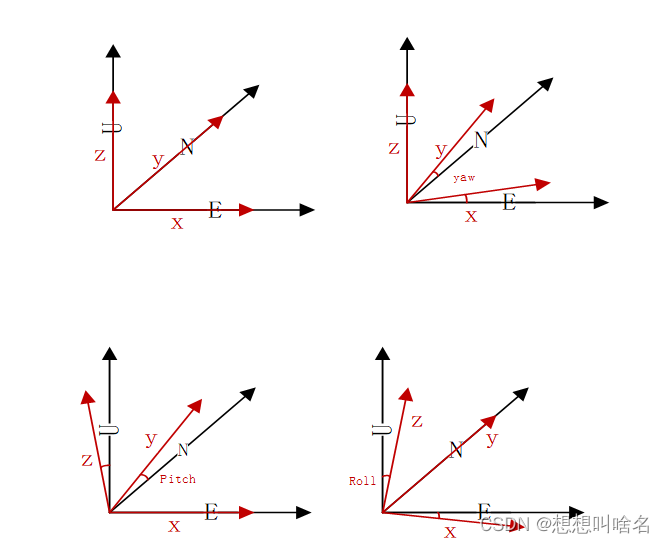
图2东北天地理坐标系
北东地坐标系下四元数与欧拉角的转换

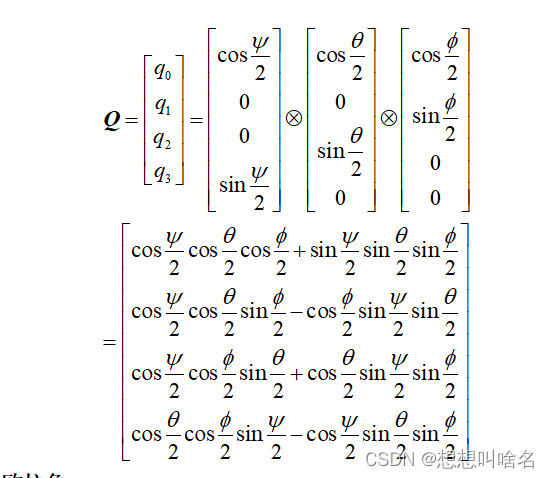
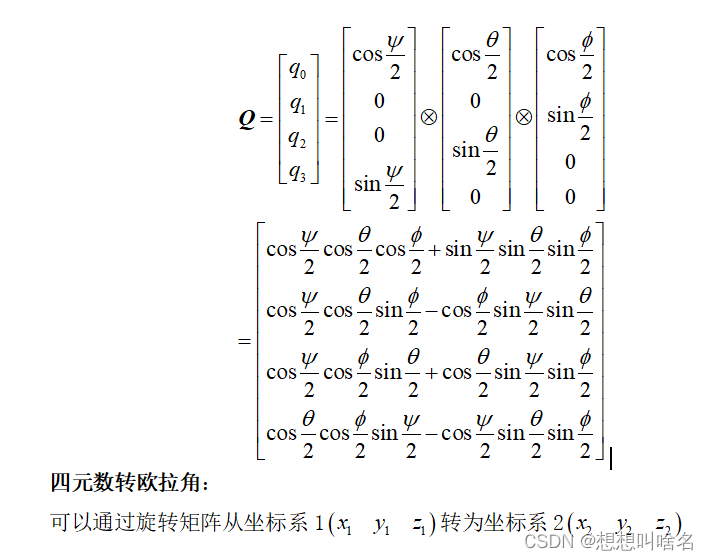
欧拉角转四元数:
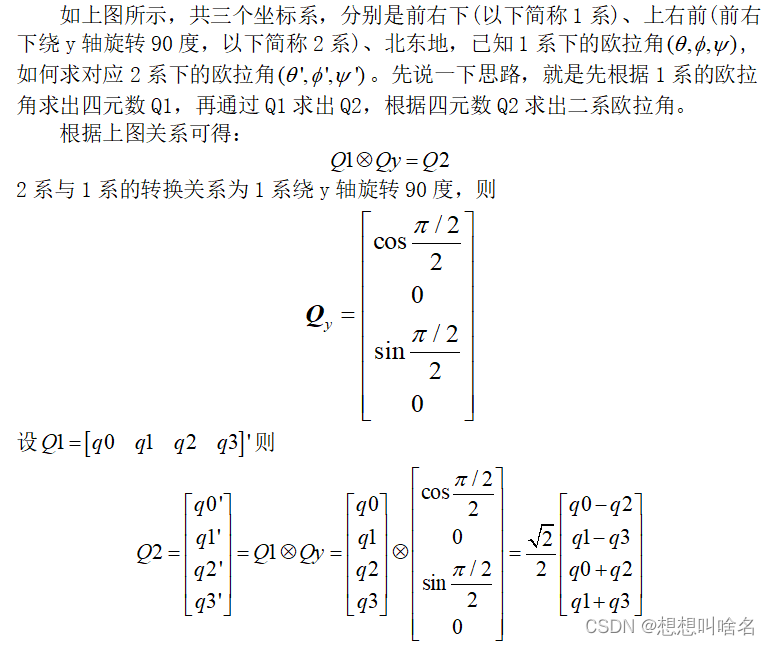
对应的旋转四元数为:

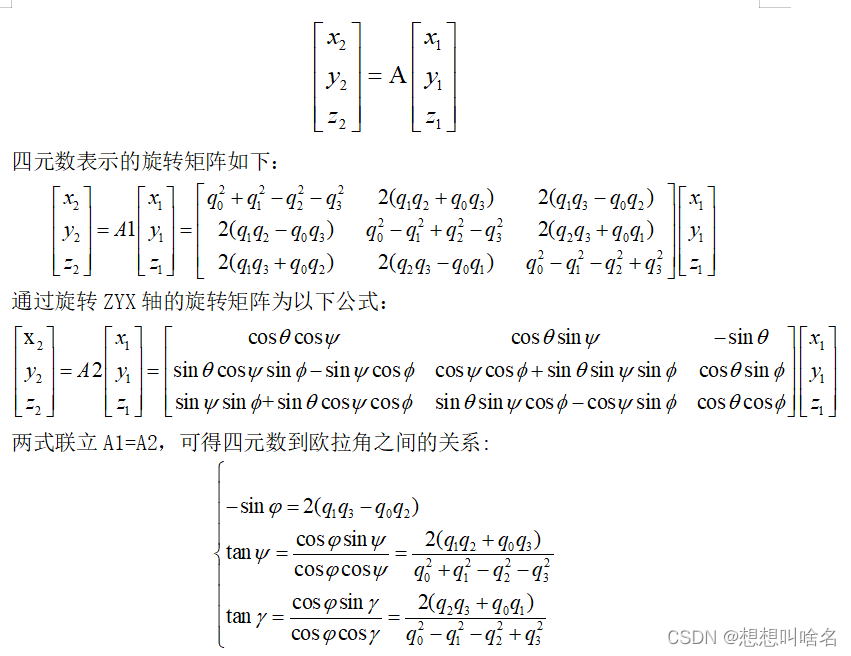
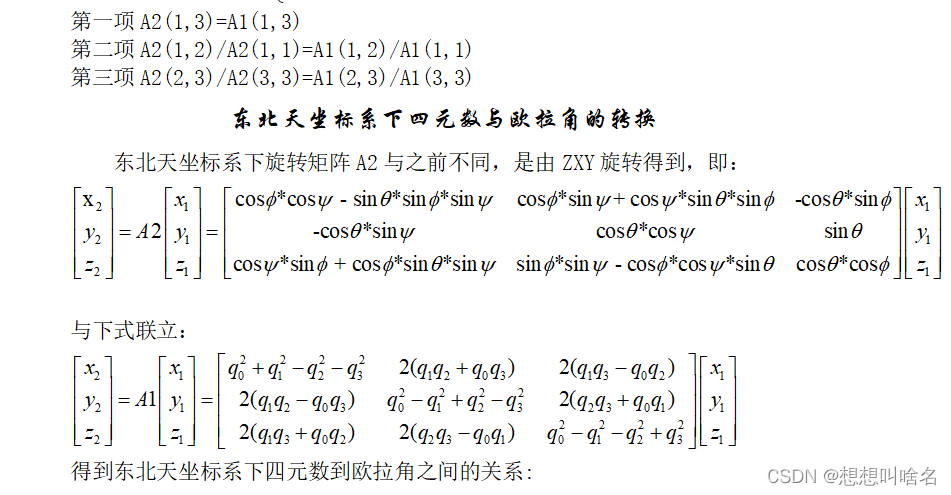
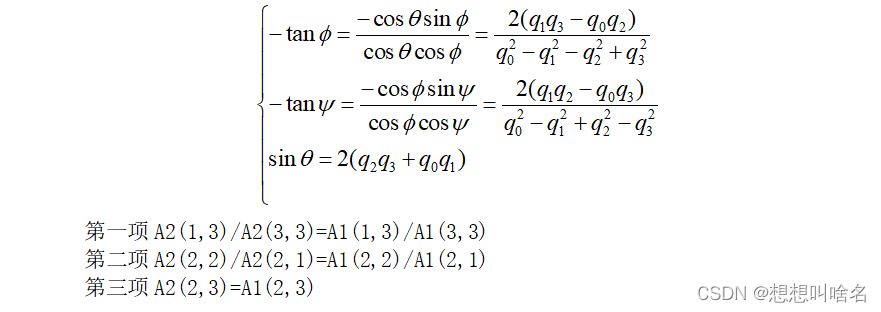
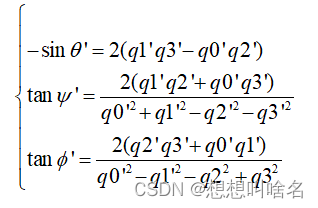
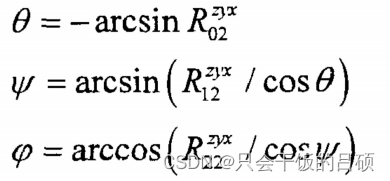
 再根据转换公式即可求出2系下的欧拉角
再根据转换公式即可求出2系下的欧拉角