旋转矩阵、欧拉角
注:下面为学习空间机器人技术系列课程笔记,加上一些自己的整理,方便复习。
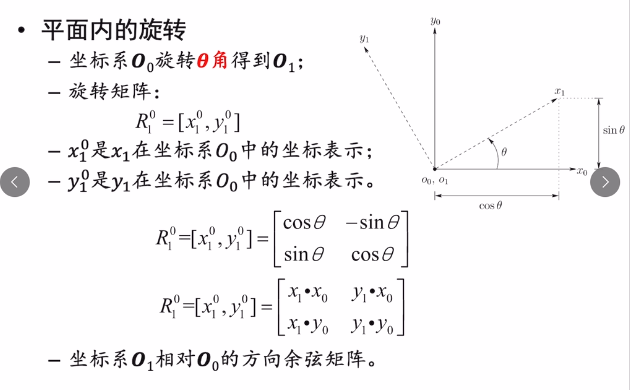
一、旋转矩阵的引出
下面坐标系0的基向量为 ( x 0 , y 0 ) (x_{0},y_{0}) (x0,y0),坐标系1的基向量为 ( x 1 , y 1 ) (x_{1},y_{1}) (x1,y1)。
拓展到三维空间
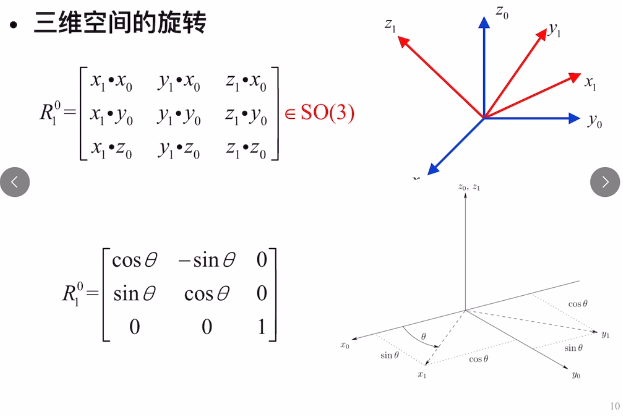
以此类推,绕不同的轴的旋转矩阵如下:

二、坐标变换
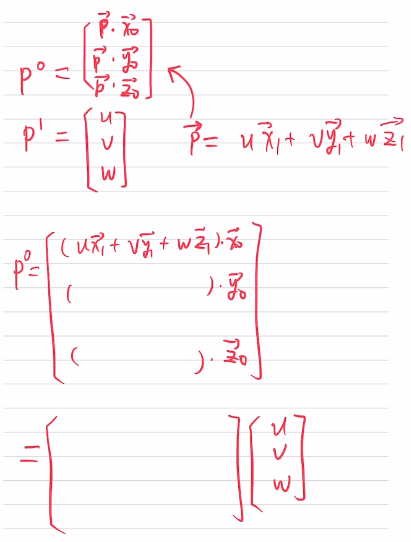
在坐标系1下,向量p表示为:
p = u x 1 + v y 1 + w z 1 p=ux_{1}+vy_{1}+wz_{1} p=ux1+vy1+wz1
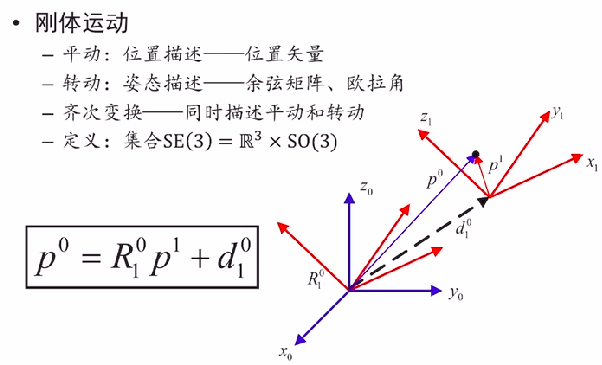
将其转换到坐标系0下,为p在坐标系0的基向量 ( x 0 , y 0 , z 0 ) (x_{0},y_{0},z_{0}) (x0,y0,z0)下的表示: p 0 p^{0} p0
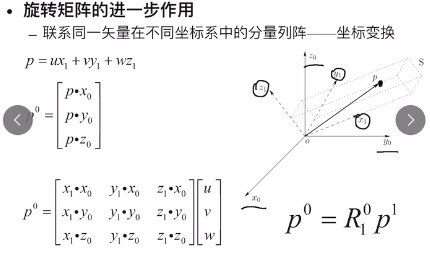
具体推导过程如下,最终得到p在1坐标系下的表示 p 1 p^{1} p1,经过0到1的旋转矩阵 R 1 0 R_{1}^{0} R10(或者称为1到0的坐标变换矩阵),得到p在0坐标下的表示 p 0 p^{0} p0
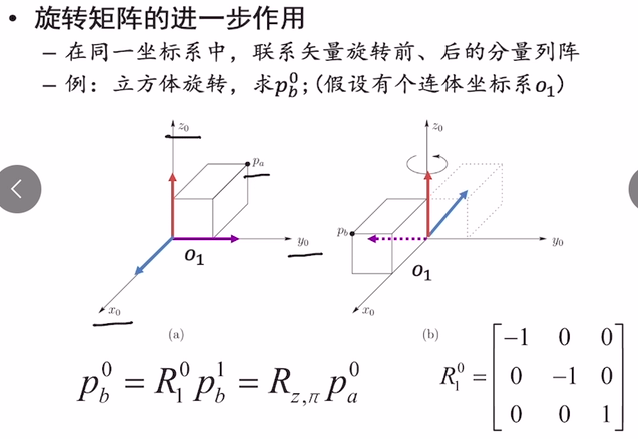
三、向量的旋转
同一坐标系下,向量的旋转。
注意下面假设的连体坐标系 o 1 o_{1} o1
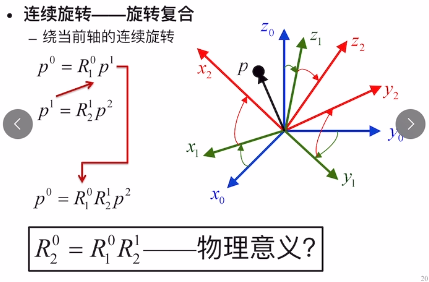
四、旋转的复合
第一类情况:绕当前轴的旋转,也就是始终绕着转动之后的自身轴旋转,也称之为内旋。
这种情况,连续右乘即可。
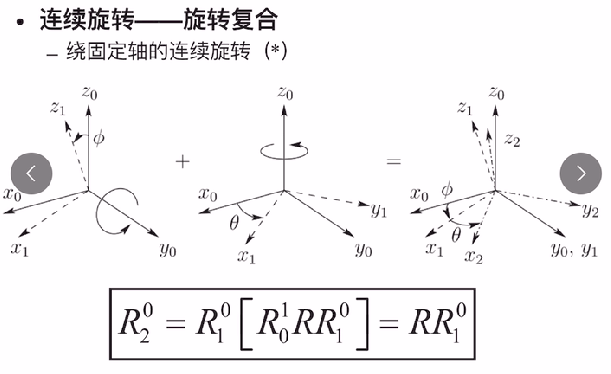
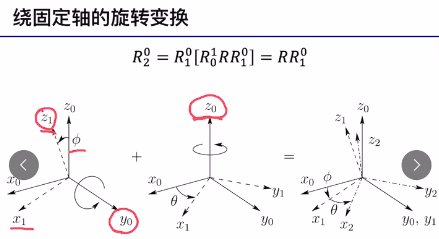
第二种情况:绕着固定轴的旋转,绕着不动的坐标系的轴旋转,也称之为外旋。
这种情况,需要左乘旋转矩阵。推导过程涉及到下面提到的相似变换。
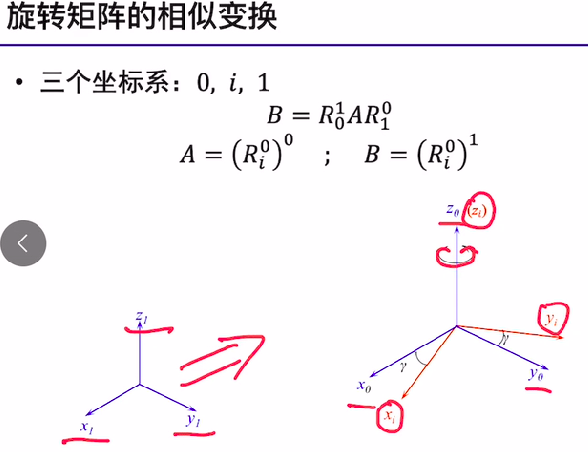
五、旋转矩阵的相似变换
下面的 ( R i 0 ) 0 (R_{i}^{0})^{0} (Ri0)0 是指, 0 0 0 到 i i i 的旋转矩阵 R i 0 R_{i}^{0} Ri0 在 0 0 0 中的表示。
同理, ( R i 0 ) 1 (R_{i}^{0})^{1} (Ri0)1 是指, 0 0 0 到 i i i 的旋转矩阵 R i 0 R_{i}^{0} Ri0 在 1 1 1 中的表示。
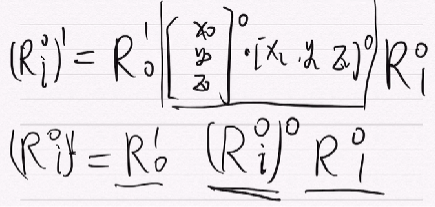
推导过程如下:

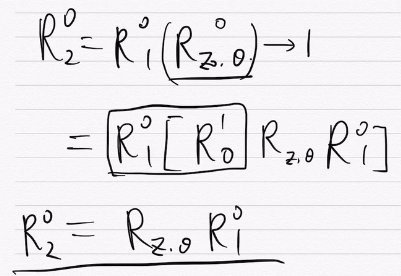
所以上面绕固定轴的旋转,推导过程如下:
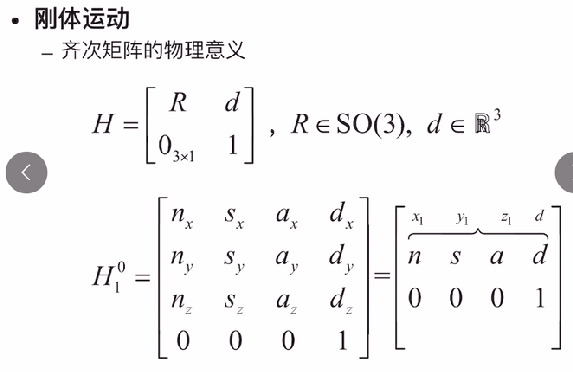
六、齐次坐标变换
前面考虑的都是只有旋转的情况,当既有旋转,也有平动的情况了。
可以看做先旋转,然后在平动。
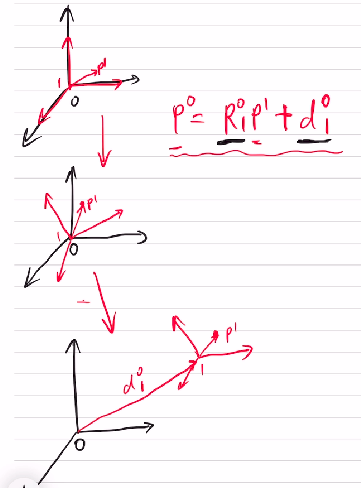
但是如果有连续平移旋转的情况下,这种带有加号的情况,不太简洁。所有采用齐次变换这种方式,把旋转和平移写到一个矩阵里面。这样连续变换,只需要连乘齐次变换矩阵就好了。
以 H 1 0 H_{1}^{0} H10为例, R R R是指 R 1 0 R_{1}^{0} R10, d d d是指 d 1 0 d_{1}^{0} d10(1在坐标系0下的向量)
七、欧拉角以及rpy
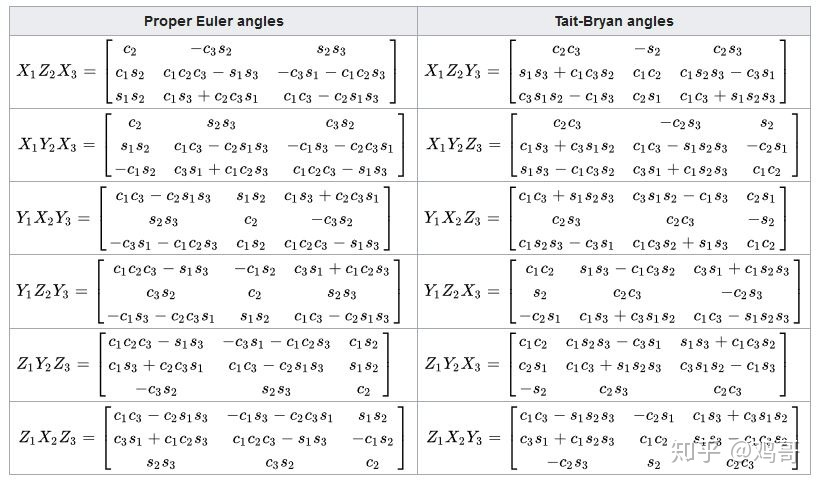
围绕坐标轴旋转的先后次序不同,得到的最终欧拉角姿态就不同,所以根据坐标系绕坐标轴旋转顺序的不同会有12种欧拉角。
- 常规欧拉角 (Z-X-Z, X-Y-X, Y-Z-Y, Z-Y-Z, X-Z-X, Y-X-Y)
- 泰特 - 布赖恩角 (X-Y-Z, Y-Z-X, Z-X-Y, X-Z-Y, Z-Y-X, Y-X-Z)
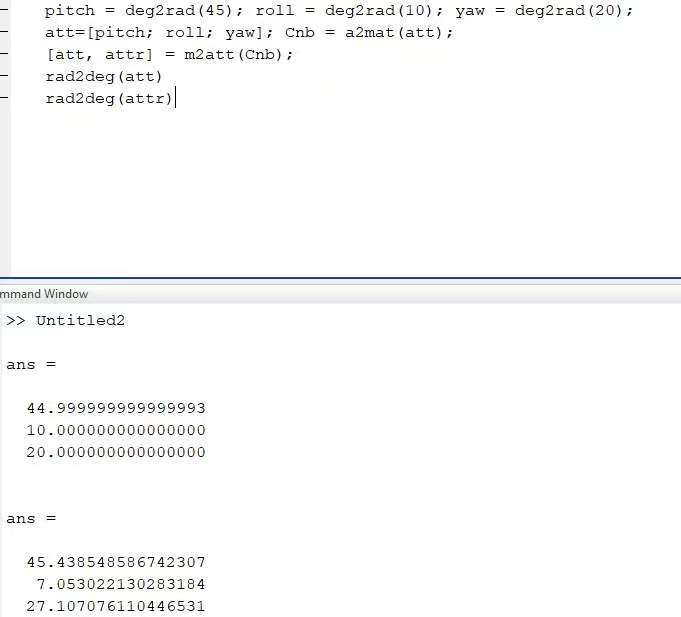
在机器人中常用的 r o l l ( x ) , p i t c h ( y ) , y a w ( z ) roll(x) , pitch(y), yaw(z) roll(x),pitch(y),yaw(z),是指3-2-1转序的欧拉角。
对应内旋,绕自身坐标系,从左到右:
→ R z ψ R y θ R x φ \underset{R_{z\psi }R_{y\theta }R_{x\varphi }}{\rightarrow} RzψRyθRxφ→
和下面的外旋等价,绕固定坐标系,从右到左:
← R z ψ R y θ R x φ \underset{R_{z\psi }R_{y\theta }R_{x\varphi }}{\leftarrow} RzψRyθRxφ←
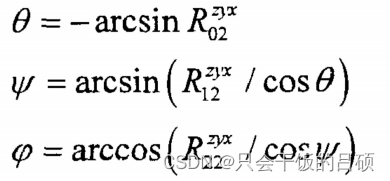
关于不同转序的欧拉角(内旋),对应的旋转矩阵为:
八、欧拉角的万向锁(Gimbal Lock)
欧拉角看起来比较直观,比较适合人机交互。但是也有一些问题:
- 需要注意旋转次序,内旋还是外旋。这个不加注意,容易出错。
- 三个量的欧拉角,表示三维旋转,比较紧凑,但是会具有奇异性,比如说 p i t c h pitch pitch 角为 ± π / 2 ±π/2 ±π/2 时,出现万向锁。
虽然有万向锁问题,但是一些平面运动,比如车辆,是不会出现 p i t c h pitch pitch 角为 ± π / 2 ±π/2 ±π/2 的情况的,为了方便交互,往往也会采用。
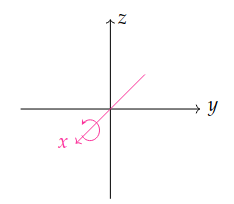
万向锁的几何解释
首先,我们沿着 𝑥 轴旋转任意的度数:
接下来,我们沿 𝑦 轴旋转 𝜋/2 弧度:
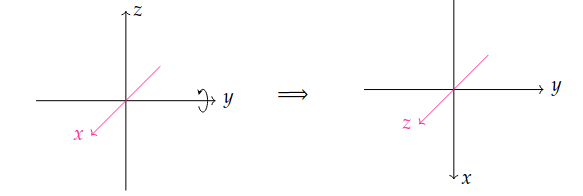
注意,经过这一次的变换之后,我们将 𝑧 轴变换到原来 𝑥 轴方向,而 𝑥轴变到原来 −𝑧 的方向。
这个变换执行完毕后,我们仅仅只剩下一个 𝑧 轴的旋转矩阵了。
然而,当前的 𝑧 轴与原来的 𝑥 轴重合,也就是说,最后 𝑧 轴的旋转与 𝑥 轴的旋转其实操纵的是同一个轴。
三次旋转变换仅仅覆盖了两个轴的旋转,一个自由度就这样丢失了,这也就导致了 Gimbal Lock 的现象
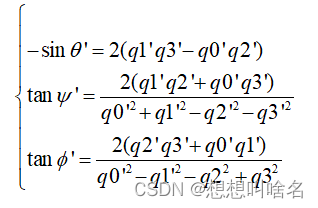
万向锁的数学解释
这里采用3-2-1转序,内旋的欧拉角来解释。
绕着各个轴旋转的旋转矩阵,分别如下:

当绕着 y y y轴,旋转 π / 2 π/2 π/2时,组合出矩阵如下:
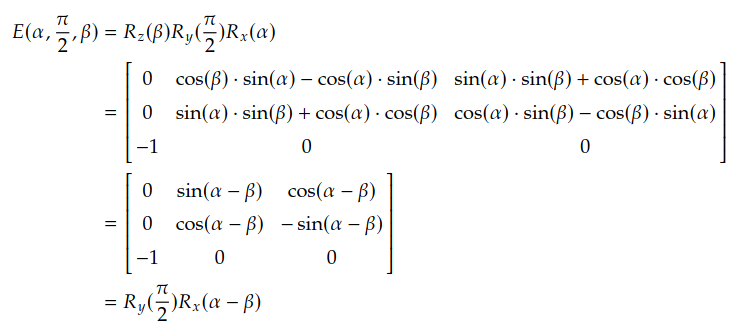
将原本绕着三个轴旋转,所组成的变换化,简成了绕两个轴的变化。
即便我们分别对 𝑧-𝑦-𝑥 三轴进行了旋转,实际上这个矩阵仅仅旋转了 𝑥-𝑦 两轴,它并没有对(初始的)𝑧 轴进行变换。也就是无论 𝑥轴与 𝑧 轴的旋转角是多少,变换都会丧失一个自由度。
九、对应的eigen代码
上面数学公式,所对应的eigen代码如下,根据实际使用需要可以方便查询。
#include <Eigen/Core>
#include <Eigen/Geometry> // Eigen/Geometry 模块提供了各种旋转和平移的表示
using namespace std;
using namespace Eigen;// 1、旋转矩阵相关// 3D 旋转矩阵直接使用 Matrix3d 或 Matrix3f, Matrix3d 实质上是 Eigen::Matrix<double, 3, 3>Matrix3d rotation_matrix = Matrix3d::Identity();// 旋转向量使用轴角 AngleAxis, 它底层不直接是Matrix,但运算可以当作矩阵(因为重载了运算符)AngleAxisd rotation_vector(M_PI / 4, Vector3d(0, 0, 1)); //沿 Z 轴旋转 45 度cout << "rotation matrix =\n" << rotation_vector.matrix() << endl; //轴角,用matrix()转换成矩阵rotation_matrix = rotation_vector.toRotationMatrix(); // 也可以直接赋值// 2、坐标变换相关// 用 AngleAxis 可以进行坐标变换Vector3d v(1, 0, 0);Vector3d v_rotated = rotation_vector * v;cout << "(1,0,0) after rotation (by angle axis) = " << v_rotated.transpose() << endl;// 或者用旋转矩阵v_rotated = rotation_matrix * v;cout << "(1,0,0) after rotation (by matrix) = " << v_rotated.transpose() << endl;//6、齐次变换(欧氏变换矩阵)使用 Eigen::IsometryIsometry3d T = Isometry3d::Identity(); // 虽然称为3d,实质上是4*4的矩阵T.rotate(rotation_vector); // 按照rotation_vector进行旋转T.pretranslate(Vector3d(1, 3, 4)); // 把平移向量设成(1,3,4)cout << "Transform matrix = \n" << T.matrix() << endl;// 用变换矩阵进行坐标变换Vector3d v_transformed = T * v; // 相当于R*v+tcout << "v tranformed = " << v_transformed.transpose() << endl;//7、 欧拉角: 可以将旋转矩阵直接转换成欧拉角Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX顺序,即yaw-pitch-roll顺序cout << "yaw pitch roll = " << euler_angles.transpose() << endl;// 四元数// 可以直接把AngleAxis赋值给四元数,反之亦然Quaterniond q = Quaterniond(rotation_vector);cout << "quaternion from rotation vector = " << q.coeffs().transpose()<< endl; // 请注意coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部// 也可以把旋转矩阵赋给它q = Quaterniond(rotation_matrix);cout << "quaternion from rotation matrix = " << q.coeffs().transpose() << endl;// 使用四元数旋转一个向量,使用重载的乘法即可v_rotated = q * v; // 注意数学上是qvq^{-1}cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl;
参考资料
空间机器人技术
Bonus: Gimbal Lock — Krasjet
slam14讲所附代码