Odom笔记
1.两轮差速底盘的运动模型分析:运动控制与里程计解算解算1
解算2
两轮差速底盘运动模型:运动控制与里程计结算
1)特点:
控制简单、里程计计算简单;
只能给定X方向速度、Z轴方向角速度。
2)机器人自身约束方程(物理特性)
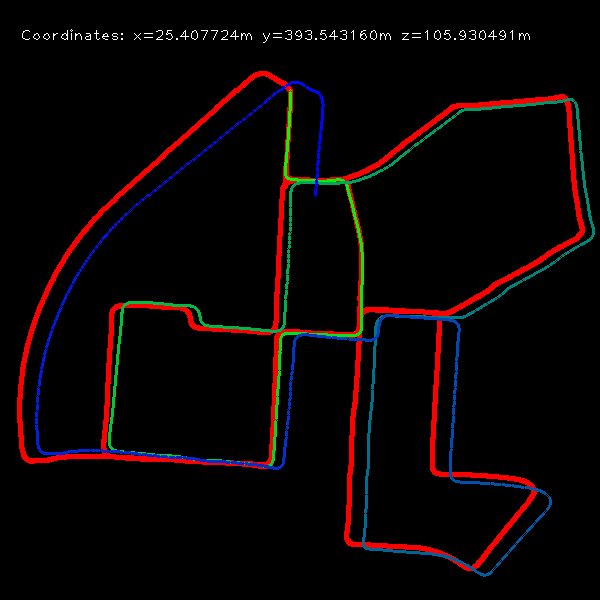
里程计计算:以机器人上电时刻为世界坐标系的起点O(0,0)(航向为世界坐标系的X轴指向)累积计算任意时刻机器人相对于世界坐标系的位置及航向。
机器人的位置pose.Xw、pose.Yw的值可以看成是车体运动方向极小时间内位置增量分解到X、Y方向的积分量。

!此时分两种方式来推算轨迹:速度推算方式、编码器推算方式
第一:速度推算轨迹:(速度积分累积误差较大,最终精度在10%左右)