1. 基于opencv的视觉里程计(visual odometry)
GitHub - Transportation-Inspection/visual_odometry: visual odometry in python scripts
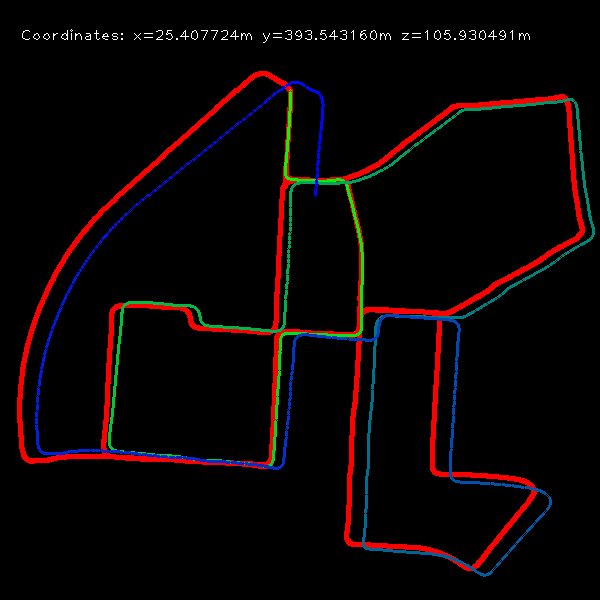
The Python Monocular Visual Odometry (py-MVO) project used the monoVO-python repository, which is a Python implementation of the mono-vo repository, as its backbone. An in depth explanation of the fundamental workings of the algorithm maybe found in Avi Sinhg's report. The monoVO-python code was optimized in order to make it more robust, using advance methods in order to obtain a higher level of accuracy.This report provides information about the optimizations done to the monoVO-python code. The GPS data in the images EXIF file can also be used to formulate a GPS trajectory in order to compare with the results of Visual Odometry(VO) trajectory. A merge between the GPS and VO trajectories is also possible in order to get an even more reliable motion estimation. The KITTI dataset was used for testing our methods and new implementations, since they offer accurate camera projection matrices, undistorted images, and reliable ground truth data.
*The GPS trajectories can only be done with GPS-tagged images(GPS data inside the image's EXIF file).
GitHub - uoip/monoVO-python: A simple monocular visual odometry project in PythonKeywords: FAST Feature Detection, LK Feature Tracking, Five-Point Motion Estimation