目标:在不使用 CLI 的情况下从包中读取数据。
教程级别:高级
时间:10 分钟
目录
背景
先决条件
任务
1 创建一个包裹
2 编写 C++ 读取器
3 构建并运行
摘要
背景
rosbag2 不仅提供 ros2 bag 命令行工具。它还提供了一个 C++ API,用于从您自己的源代码中读取和写入包。这使您可以在不播放包的情况下读取包中的内容,这有时会很有用。
先决条件
您应该在常规的 ROS 2 设置中安装 rosbag2 软件包。
如果您需要安装 ROS 2,请查看安装说明。
你应该已经完成了基本的 ROS 2 包教程https://docs.ros.org/en/jazzy/Tutorials/Beginner-CLI-Tools/Recording-And-Playing-Back-Data/Recording-And-Playing-Back-Data.html ,我们将使用你在那里创建的 subset 包。
任务
1 创建一个包裹
打开一个新的终端并且初始化您的 ROS 2 安装,这样 ros2 命令就会生效。
在新的或现有的工作区中,导航到 src 目录并创建一个新包:
ros2 pkg create --build-type ament_cmake --license Apache-2.0 bag_reading_cpp --dependencies rclcpp rosbag2_transport turtlesim您的终端将返回一条消息,验证您的包 bag_reading_cpp 及其所有必要的文件和文件夹的创建。 --dependencies 参数将自动添加必要的依赖行到 package.xml 和 CMakeLists.txt 。在这种情况下,该包将使用 rosbag2_transport 包以及 rclcpp 包。要处理自定义的 turtlesim 消息,还需要依赖 turtlesim 包。
1.1 更新 package.xml
因为您在创建包时使用了 --dependencies 选项,您无需手动将依赖项添加到 package.xml 或 CMakeLists.txt 。但是,一如既往,请确保将描述、维护者电子邮件和姓名以及许可信息添加到 package.xml 。
<description>C++ bag reading tutorial</description><maintainer email="cxy@126.com">cxy</maintainer><license>Apache-2.0</license>2 编写 C++ 读取器
在你的包的 src 目录中,创建一个名为 simple_bag_reader.cpp 的新文件,并将以下代码粘贴到其中。
#include <chrono> // 用于时间处理的库
#include <functional> // 用于函数对象的库
#include <iostream> // 用于输入输出流的库
#include <memory> // 用于智能指针的库
#include <string> // 用于字符串处理的库#include "rclcpp/rclcpp.hpp" // ROS 2 的 C++ 客户端库
#include "rclcpp/serialization.hpp" // ROS 2 的序列化库
#include "rosbag2_transport/reader_writer_factory.hpp" // 用于读写 rosbag2 的工厂
#include "turtlesim/msg/pose.hpp" // turtlesim 包中的 Pose 消息类型using namespace std::chrono_literals; // 使用 chrono 的字面量class PlaybackNode : public rclcpp::Node // 定义 PlaybackNode 类,继承自 rclcpp::Node
{public:PlaybackNode(const std::string & bag_filename) // 构造函数,接受一个 bag 文件名作为参数: Node("playback_node") // 调用基类构造函数,设置节点名称为 "playback_node"{publisher_ = this->create_publisher<turtlesim::msg::Pose>("/turtle1/pose", 10); // 创建一个发布者,发布到 "/turtle1/pose" 话题,队列大小为 10timer_ = this->create_wall_timer(100ms, // 创建一个定时器,每 100 毫秒触发一次[this](){return this->timer_callback();} // 定时器的回调函数);rosbag2_storage::StorageOptions storage_options; // 创建存储选项实例storage_options.uri = bag_filename; // 设置存储选项的 URI 为 bag 文件名reader_ = rosbag2_transport::ReaderWriterFactory::make_reader(storage_options); // 通过工厂创建一个 rosbag2 读取器reader_->open(storage_options); // 打开读取器}private:void timer_callback() // 定时器的回调函数
{while (reader_->has_next()) { // 如果读取器有下一条消息rosbag2_storage::SerializedBagMessageSharedPtr msg = reader_->read_next(); // 读取下一条消息if (msg->topic_name != "/turtle1/pose") { // 如果消息的主题不是 "/turtle1/pose"continue; // 跳过本次循环}rclcpp::SerializedMessage serialized_msg(*msg->serialized_data); // 创建一个序列化消息turtlesim::msg::Pose::SharedPtr ros_msg = std::make_shared<turtlesim::msg::Pose>(); // 创建一个 Pose 消息的共享指针serialization_.deserialize_message(&serialized_msg, ros_msg.get()); // 反序列化消息publisher_->publish(*ros_msg); // 发布消息std::cout << '(' << ros_msg->x << ", " << ros_msg->y << ")\n"; // 输出消息的位置信息break; // 退出循环}}rclcpp::TimerBase::SharedPtr timer_; // 定时器的共享指针rclcpp::Publisher<turtlesim::msg::Pose>::SharedPtr publisher_; // 发布者的共享指针rclcpp::Serialization<turtlesim::msg::Pose> serialization_; // 序列化实例std::unique_ptr<rosbag2_cpp::Reader> reader_; // 读取器的唯一指针
};int main(int argc, char ** argv) // 主函数
{if (argc != 2) { // 如果参数数量不等于 2std::cerr << "Usage: " << argv[0] << " <bag>" << std::endl; // 输出用法提示return 1; // 返回错误码 1}rclcpp::init(argc, argv); // 初始化 ROS 2rclcpp::spin(std::make_shared<PlaybackNode>(argv[1])); // 创建 PlaybackNode 实例并进入事件循环rclcpp::shutdown(); // 关闭 ROS 2return 0; // 返回 0
}2.1 检查代码
顶部的 #include 语句是包依赖项。请注意, rosbag2_transport 包中的头文件包含了处理包文件所需的函数和结构。
下一行创建将从包文件读取并回放数据的节点。
class PlaybackNode : public rclcpp::Node现在,我们可以创建一个以 10 赫兹运行的定时器回调。我们的目标是在每次运行回调时向 /turtle1/pose 主题重放一条消息。请注意,构造函数将路径作为参数传递给包文件。
public:PlaybackNode(const std::string & bag_filename): Node("playback_node"){publisher_ = this->create_publisher<turtlesim::msg::Pose>("/turtle1/pose", 10);timer_ = this->create_wall_timer(100ms,[this](){return this->timer_callback();});我们还在构造函数中打开bag。 rosbag2_transport::ReaderWriterFactory 是一个类,可以根据存储选项构造压缩或未压缩的读取器或写入器。
rosbag2_storage::StorageOptions storage_options;
storage_options.uri = bag_filename;
reader_ = rosbag2_transport::ReaderWriterFactory::make_reader(storage_options);
reader_->open(storage_options);现在,在我们的计时器回调中,我们循环遍历包中的消息,直到读取到从我们所需主题记录的消息。请注意,序列化消息除了主题名称外还有时间戳元数据。
void timer_callback()
{while (reader_->has_next()) {rosbag2_storage::SerializedBagMessageSharedPtr msg = reader_->read_next();if (msg->topic_name != "/turtle1/pose") {continue;}然后,我们从刚刚读取的序列化数据构建一个 rclcpp::SerializedMessage 对象。此外,我们需要创建一个 ROS 2 反序列化消息,该消息将保存我们的反序列化结果。然后,我们可以将这两个对象传递给 rclcpp::Serialization::deserialize_message 方法。
rclcpp::SerializedMessage serialized_msg(*msg->serialized_data);
turtlesim::msg::Pose::SharedPtr ros_msg = std::make_shared<turtlesim::msg::Pose>();serialization_.deserialize_message(&serialized_msg, ros_msg.get());最后,我们发布反序列化的消息并将 xy 坐标打印到终端。我们还会跳出循环,以便在下一个计时器回调期间发布下一条消息。
publisher_->publish(*ros_msg);std::cout << '(' << ros_msg->x << ", " << ros_msg->y << ")\n";break;
}我们还必须声明在整个节点中使用的私有变量。
rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<turtlesim::msg::Pose>::SharedPtr publisher_;rclcpp::Serialization<turtlesim::msg::Pose> serialization_;std::unique_ptr<rosbag2_cpp::Reader> reader_;
};最后,我们创建主函数,该函数将检查用户是否传递了包文件路径的参数并启动我们的节点。
int main(int argc, char ** argv)
{if (argc != 2) {std::cerr << "Usage: " << argv[0] << " <bag>" << std::endl;return 1;}rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<PlaybackNode>(argv[1]));rclcpp::shutdown();return 0;
}2.2 添加可执行文件
现在打开 CMakeLists.txt 文件。
在包含 find_package(rosbag2_transport REQUIRED) 的依赖块下面,添加以下代码行。
add_executable(simple_bag_reader src/simple_bag_reader.cpp)
ament_target_dependencies(simple_bag_reader rclcpp rosbag2_transport turtlesim)install(TARGETSsimple_bag_readerDESTINATION lib/${PROJECT_NAME}
)3. 构建并运行
导航回到工作区的根目录并构建您的新包。
colcon build --packages-select bag_reading_cpp接下来,获取安装文件
source install/setup.bash现在运行脚本。确保将 /path/to/subset 替换为 subset 包的路径。
ros2 run bag_reading_cpp simple_bag_reader ~/ros2_ws/subset你应该看到乌龟的 (x, y) 坐标打印到控制台。
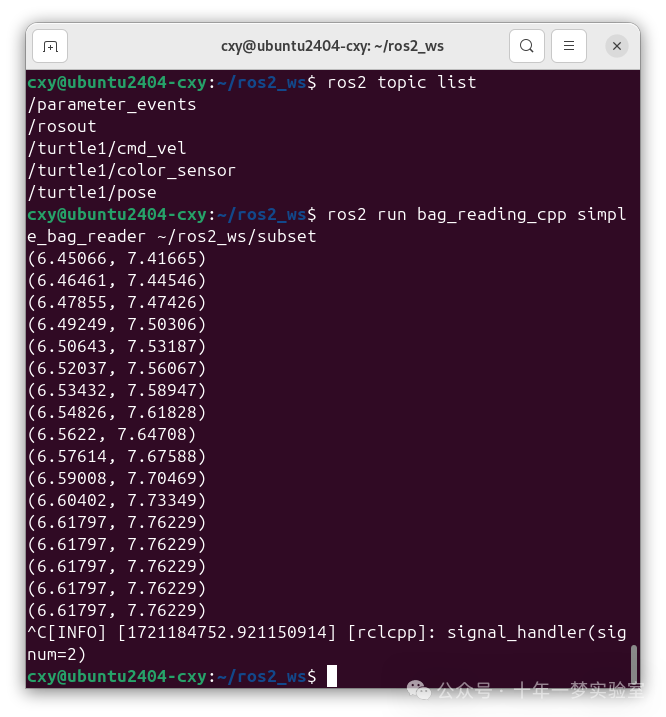
摘要
你创建了一个读取包中数据的 C++可执行文件。然后你编译并运行了该可执行文件,它将包中的一些信息打印到控制台。
附录:
记录的包内容: ~/ros2_ws/subset/metadata.yaml
rosbag2_bagfile_information:version: 9storage_identifier: mcapduration:nanoseconds: 8911648921starting_time:nanoseconds_since_epoch: 1721184333150957762message_count: 640topics_with_message_count:- topic_metadata:name: /turtle1/cmd_veltype: geometry_msgs/msg/Twistserialization_format: cdroffered_qos_profiles:- history: unknowndepth: 0reliability: reliabledurability: volatiledeadline:sec: 9223372036nsec: 854775807lifespan:sec: 9223372036nsec: 854775807liveliness: automaticliveliness_lease_duration:sec: 9223372036nsec: 854775807avoid_ros_namespace_conventions: falsetype_description_hash: RIHS01_9c45bf16fe0983d80e3cfe750d6835843d265a9a6c46bd2e609fcddde6fb8d2amessage_count: 82- topic_metadata:name: /turtle1/posetype: turtlesim/msg/Poseserialization_format: cdroffered_qos_profiles:- history: unknowndepth: 0reliability: reliabledurability: volatiledeadline:sec: 9223372036nsec: 854775807lifespan:sec: 9223372036nsec: 854775807liveliness: automaticliveliness_lease_duration:sec: 9223372036nsec: 854775807avoid_ros_namespace_conventions: falsetype_description_hash: RIHS01_739beba26bcba6920404ba722b7b8321348512f92ea5be235c47251940dd8aa9message_count: 558compression_format: ""compression_mode: ""relative_file_paths:- subset_0.mcapfiles:- path: subset_0.mcapstarting_time:nanoseconds_since_epoch: 1721184333150957762duration:nanoseconds: 8911648921message_count: 640custom_data: ~ros_distro: jazzy记录多个主题:
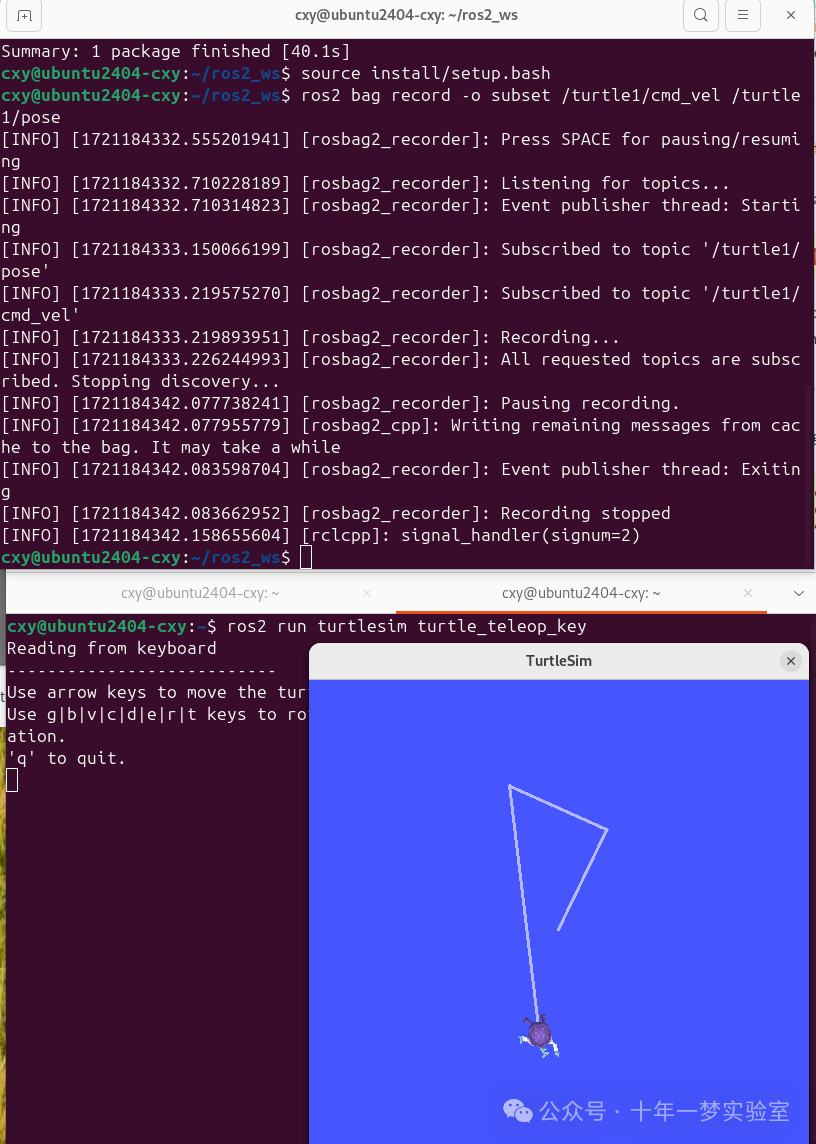
ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose