Ploblem 11-1
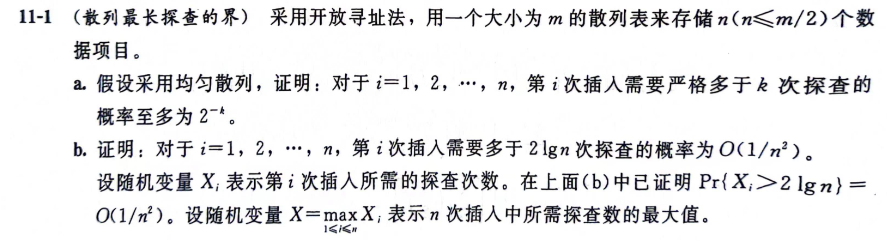

a.从所有可能的索引中统一计算每个探针的索引。由于我们有 n≤m/2,我们知道在任何阶段至少有一半的指标是空的。因此,对于需要超过 k 个探针,我 们需要在每 k 个第一个探针中,我们探测到一个已经有一个入口的顶点,这 个概率小于 1/2,所以每次发生的概率小于 1/(2k)。
b.使用前一部分k=2lg (n)的结果,我们得到需要这么多探针的概率是
c.我们应用上一部分结果后的联合界
d.探测序列的最长可能长度是 n,因为我们会尝试检查数组中已经放置的每一个条目。我们还知道,需要长度大于 2lg (n)的序列的概率≤1/n。所以,我 们知道期望值的最大值是


Ploblem 11-2
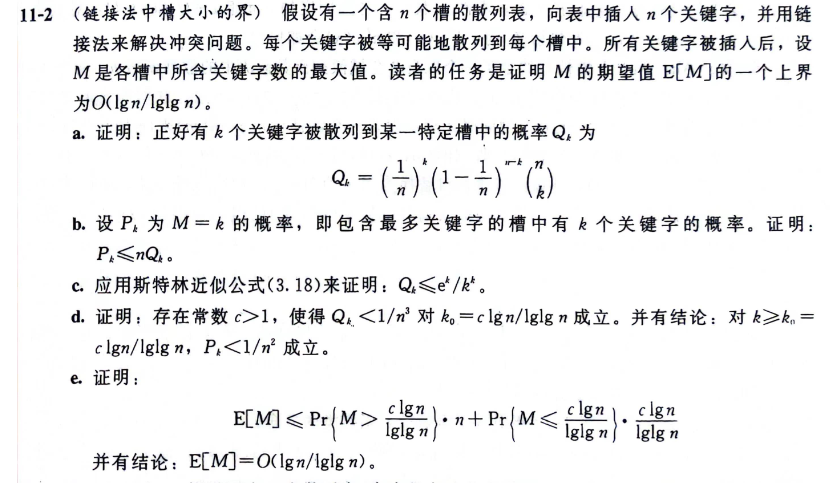
a.设 Qk 表示恰好有 k 个键散列到特定槽的概率。有
种方法可以选择 k 个键, 它们以
的概率散列到那个位置 ,并将剩余的 n− k 个键散列到剩余的 n− 1 个槽的概率
。因此,
。
b.包含最多键的槽恰好包含 k 个键的概率在上面以某个槽包含 k 个键的概率为 界。我们可以选择 n 个槽来包含这 k 个键,所以 Pk ≤nQk。
c.利用
,我们有
。
d.我们想让 Qk0 < n^3,对两边取对数,用对数法则展开,这就变成了
两边同时除以- lglgn 就等于
当 n→∞时,除最后一项外的所有项都趋于 0,因此对于 N 的某个固定值, 选择 c = 4 适用于所有 n > N,设 ci 表示 n = i 时适用的值,然后通过令 ci= maxi(ci, 4)我们得到 c 的期望值,通过(b)部分,我们得到 Pk0≤nQk0< n/n^3 = 1/n^2。由于 Qk 是 k 的递减函数,我们得出对于所有 k≥k0, Pk< 1/n^2。
e.这来自于通过条件作用计算期望,并在第一项中将 M 从上到下限定为 n。从(d)中的边界我们得到nP(M >clgn / lglgn) < 1。对于第二项,
, 其中
,因此有渐近期望。

Ploblem 11-3
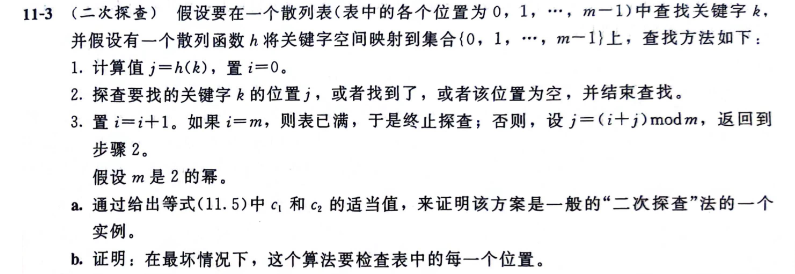
a.在每一步中,我们增加的量增加1,因此,这导致了公式
的“高斯数”。我们有c1=c2=1/2
b.为了证明这个算法检查每个数字,我们将证明它检查的每个数字都是不同的。然后,由于它总共检查了 m 个数字,这意味着每个数字都被访问了。 假设我们在两个不同的回合
,则
。
这意味着
因此,
重新排列,
所以,
现在,我们根据 i - i' 是偶数还是奇数分成两种情况。如果 i' - i是奇数,那么我们可以在两边消去它,因为它和 2m 没有公因数 (因 为 m 是 2 的 幂),这就留给我们
因为 i < i',我们有 i+ i' + 1≤ 2i' < 2 m,所以,我们必须有 i+ i' + 1 = 0,这与我们假设这样 的 i 和 i' 存在的假设相矛盾。
如果我们有 i'- i 是偶数,那么 i+ i' + 1 是奇数,所以它与 2m 没有公因式。类似地,这意味着我们可以消去这个因子得到 i' - i ≡ 0 mod 2m。然而,我们有 |i' − i|≤ i' +i <2i' < 2m。因此,我们必须有 i' - i = 0, 这 与 我 们 选 择 i 和 i' 的 方 式相矛盾。
Ploblem 11-4
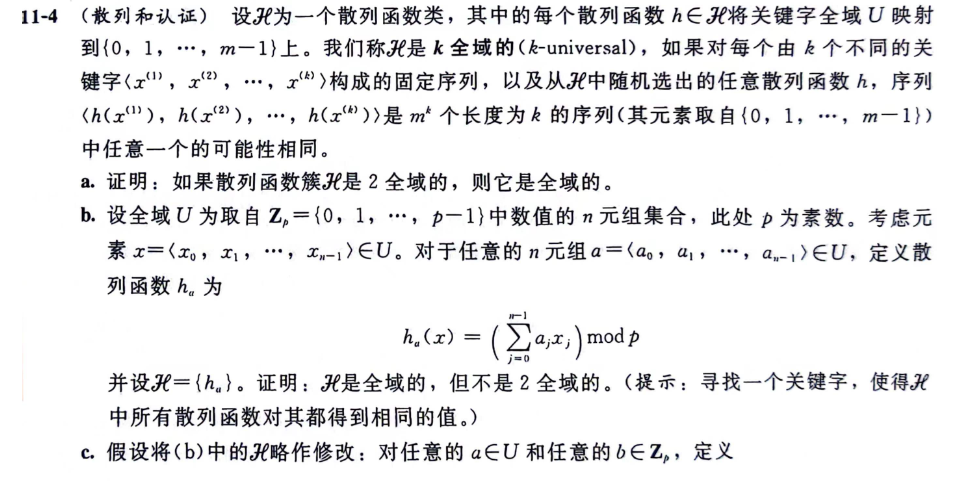
a.设 k, l∈U 是任意的。然后 P(h(k) = h(l)) = P(<h(k), h(l)> = < x, x >)对于 一些 x∈[m]。由于 h 来自一组 2-全域哈希函数,因此这同样有可能是其中 m^2 的任何一个结果。有m个可能的 x值会导致碰撞,所以碰撞的概率是
。
b.碰撞的概率是1/p,所以H是全称的。 现 在 考 虑 元 组 z =< 0, 0,… , 0 >。 则 ha (x) = hb (x) = 0,对于任意 a, b∈ U,因此序列< z, x^(2) >等 可 能 是从 0 开 始 的 p 个 序 列 中 的 任 何 一 个 , 但 不 可 能 是 其 他 p^2 − p 个序列中的任何一个,因此 h 不 是 2-全称的。
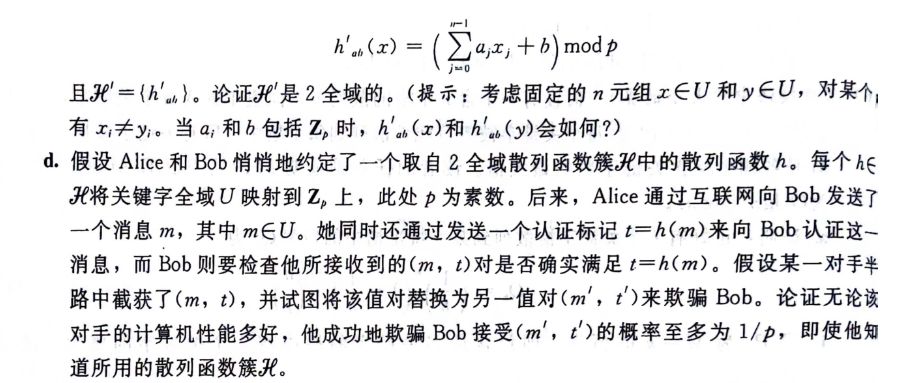
c.设 x , y∈ U 是 固 定 的 、 不 同 的 n 元 组 。 当 ai 和 b 的 取 值 范 围 在 Zp 上时,
同样有可能达到从 1 到 p 的 所 有 值 , 因 为 对 于 任 何 序 列 a, 我 们 可 以 让 b 从 1 变化到 p − 1。 因 此 ,< h'ab(x),h'ab(y)>
同 样 有 可 能 是 p^2 个 序 列 中 的 任 意 一 个 序 列 , 因 此 H 是 2-全域的。
d.由于 H 是 2-全称的,因此有 p 个其他函数将 m映射到 h (m),并且对手无法 知道 Alice 和 Bob 事先同意了其中的哪一个,因此他能做的最好的事情就是尝试其中的一个,这将成功地以 1/p 的概率愚弄 Bob。