井盖、店杆、光交箱、通信箱、标石等为城市中常见部件,在方便居民生活的同时,因为后期维护的不及时往往会出现一些“井盖吃人”、“线杆、电杆、线缆伤人”事件。造成这类问题的原因是客观的多方面的,这也是城市化进程不断发展进步的过程中难以完全避免的问题,相信随着城市化的发展完善相应的问题会得到妥善解决。本文的核心目的并不是要来深度分析此类问题形成的深度原因等,而是考虑如何从技术的角度来助力此类问题的解决,这里我们的核心思想是想要基于实况的数据集来开发构建自动化的检测识别模型,对于摄像头所能覆盖的视角内存在的对应设施部件进行关注计算,后期,在业务应用层面可以考虑设定合理的规则和预警逻辑,结合AI的自动检测识别能力来对可能出现的损坏、倒塌、折断等问题进行及时的预警,通知到相关的工程技术人员来进行维护处理,在源头端尽可能地降低可能的损害,感觉这是一个不错的技术与实际生活场景相结合的落地点。
在前文中我们已经进行了相关的项目开发实践,感兴趣的话可以自行移步阅读:
《助力城市部件[标石/电杆/光交箱/人井]精细化管理,基于DETR(DEtection TRansformer)开发构建生活场景下城市部件检测识别系统》
《助力城市部件[标石/电杆/光交箱/人井]精细化管理,基于YOLOv3开发构建生活场景下城市部件检测识别系统》
《助力城市部件[标石/电杆/光交箱/人井]精细化管理,基于YOLOv4开发构建生活场景下城市部件检测识别系统》
《助力城市部件[标石/电杆/光交箱/人井]精细化管理,基于YOLOv5全系列模型【n/s/m/l/x】开发构建生活场景下城市部件检测识别系统》
《助力城市部件[标石/电杆/光交箱/人井]精细化管理,基于YOLOv6开发构建生活场景下城市部件检测识别系统》
本文主要是选择YOLOv7-tiny和YOLOv7l来开发实现检测模型,首先看下实例效果:

YOLOv7是 YOLO 系列最新推出的YOLO 结构,在 5 帧/秒到 160 帧/秒范围内,其速度和精度都超过了大部分已知的目标检测器,在 GPU V100 已知的 30 帧/秒以上的实时目标检测器中,YOLOv7 的准确率最高。根据代码运行环境的不同(边缘 GPU、普通 GPU 和云 GPU),YOLOv7 设置了三种基本模型,分别称为 YOLOv7-tiny、YOLOv7和 YOLOv7-W6。相比于 YOLO 系列其他网络 模 型 ,YOLOv7 的 检 测 思 路 与YOLOv4、YOLOv5相似,YOLOv7 网络主要包含了 Input(输入)、Backbone(骨干网络)、Neck(颈部)、Head(头部)这四个部分。首先,图片经过输入部分数据增强等一系列操作进行预处理后,被送入主干网,主干网部分对处理后的图片提取特征;随后,提取到的特征经过 Neck 模块特征融合处理得到大、中、小三种尺寸的特征;最终,融合后的特征被送入检测头,经过检测之后输出得到结果。
YOLOv7 网络模型的主干网部分主要由卷积、E-ELAN 模块、MPConv 模块以及SPPCSPC 模块构建而成 。在 Neck 模块,YOLOv7 与 YOLOv5 网络相同,也采用了传统的 PAFPN 结构。FPN是YoloV7的加强特征提取网络,在主干部分获得的三个有效特征层会在这一部分进行特征融合,特征融合的目的是结合不同尺度的特征信息。在FPN部分,已经获得的有效特征层被用于继续提取特征。在YoloV7里依然使用到了Panet的结构,我们不仅会对特征进行上采样实现特征融合,还会对特征再次进行下采样实现特征融合。Head检测头部分,YOLOv7 选用了表示大、中、小三种目标尺寸的 IDetect 检测头,RepConv模块在训练和推理时结构具有一定的区别。
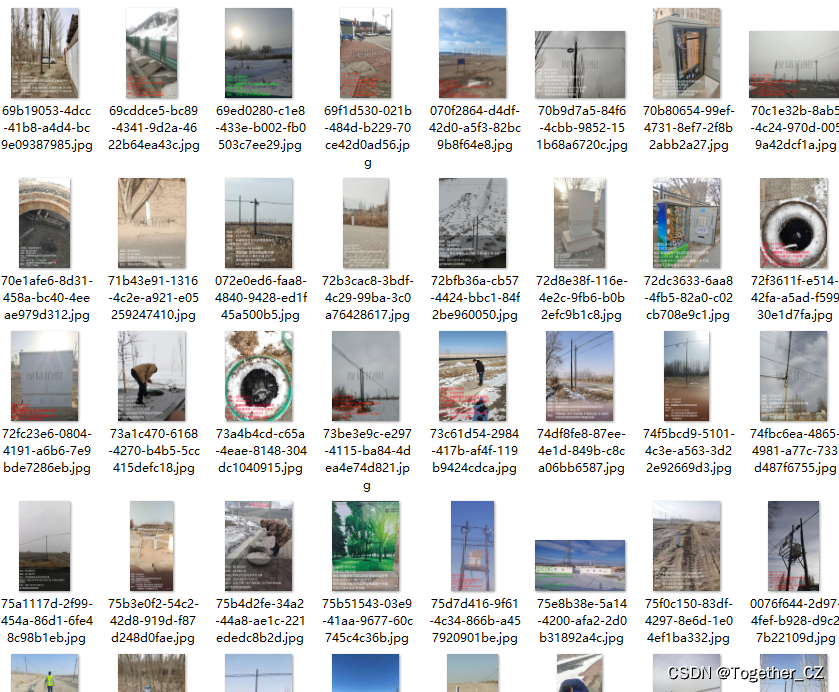
简单看下实例数据情况:

这里主要是选择了yolov7-tiny、yolov7这两款不同参数量级的模型来进行开发训练,训练数据配置文件如下:
# txt path
train: ./dataset/images/train
val: ./dataset/images/test
test: ./dataset/images/test# number of classes
nc: 4# class names
names: ['biaoshi', 'diangan', 'guangjiaoxiang', 'renjing']
【yolov7-tiny】模型文件如下:
# parameters
nc: 4 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple# anchors
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# yolov7-tiny backbone
backbone:# [from, number, module, args] c2, k=1, s=1, p=None, g=1, act=True[[-1, 1, Conv, [32, 3, 2, None, 1, nn.LeakyReLU(0.1)]], # 0-P1/2 [-1, 1, Conv, [64, 3, 2, None, 1, nn.LeakyReLU(0.1)]], # 1-P2/4 [-1, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 7[-1, 1, MP, []], # 8-P3/8[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 14[-1, 1, MP, []], # 15-P4/16[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 21[-1, 1, MP, []], # 22-P5/32[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [256, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [256, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 28]# yolov7-tiny head
head:[[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, SP, [5]],[-2, 1, SP, [9]],[-3, 1, SP, [13]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -7], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 37[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[21, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # route backbone P4[[-1, -2], 1, Concat, [1]],[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 47[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[14, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # route backbone P3[[-1, -2], 1, Concat, [1]],[-1, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [32, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [32, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 57[-1, 1, Conv, [128, 3, 2, None, 1, nn.LeakyReLU(0.1)]],[[-1, 47], 1, Concat, [1]],[-1, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [64, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [64, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 65[-1, 1, Conv, [256, 3, 2, None, 1, nn.LeakyReLU(0.1)]],[[-1, 37], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-2, 1, Conv, [128, 1, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[-1, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[-1, -2, -3, -4], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1, None, 1, nn.LeakyReLU(0.1)]], # 73[57, 1, Conv, [128, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[65, 1, Conv, [256, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[73, 1, Conv, [512, 3, 1, None, 1, nn.LeakyReLU(0.1)]],[[74,75,76], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)]【yolov7】模型文件如下:
# parameters
nc: 4 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple# anchors
anchors:- [12,16, 19,36, 40,28] # P3/8- [36,75, 76,55, 72,146] # P4/16- [142,110, 192,243, 459,401] # P5/32# yolov7 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [32, 3, 1]], # 0[-1, 1, Conv, [64, 3, 2]], # 1-P1/2 [-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [128, 3, 2]], # 3-P2/4 [-1, 1, Conv, [64, 1, 1]],[-2, 1, Conv, [64, 1, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]], # 11[-1, 1, MP, []],[-1, 1, Conv, [128, 1, 1]],[-3, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 2]],[[-1, -3], 1, Concat, [1]], # 16-P3/8 [-1, 1, Conv, [128, 1, 1]],[-2, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]], # 24[-1, 1, MP, []],[-1, 1, Conv, [256, 1, 1]],[-3, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 2]],[[-1, -3], 1, Concat, [1]], # 29-P4/16 [-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [1024, 1, 1]], # 37[-1, 1, MP, []],[-1, 1, Conv, [512, 1, 1]],[-3, 1, Conv, [512, 1, 1]],[-1, 1, Conv, [512, 3, 2]],[[-1, -3], 1, Concat, [1]], # 42-P5/32 [-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [1024, 1, 1]], # 50]# yolov7 head
head:[[-1, 1, SPPCSPC, [512]], # 51[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[37, 1, Conv, [256, 1, 1]], # route backbone P4[[-1, -2], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]], # 63[-1, 1, Conv, [128, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[24, 1, Conv, [128, 1, 1]], # route backbone P3[[-1, -2], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1]],[-2, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1]], # 75[-1, 1, MP, []],[-1, 1, Conv, [128, 1, 1]],[-3, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 2]],[[-1, -3, 63], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]], # 88[-1, 1, MP, []],[-1, 1, Conv, [256, 1, 1]],[-3, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 2]],[[-1, -3, 51], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]],[-2, 1, Conv, [512, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]], # 101[75, 1, RepConv, [256, 3, 1]],[88, 1, RepConv, [512, 3, 1]],[101, 1, RepConv, [1024, 3, 1]],[[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)]在实验阶段保持完全相同的参数设置,等待全部训练完成之后来从多个指标的维度来进行综合的对比分析。
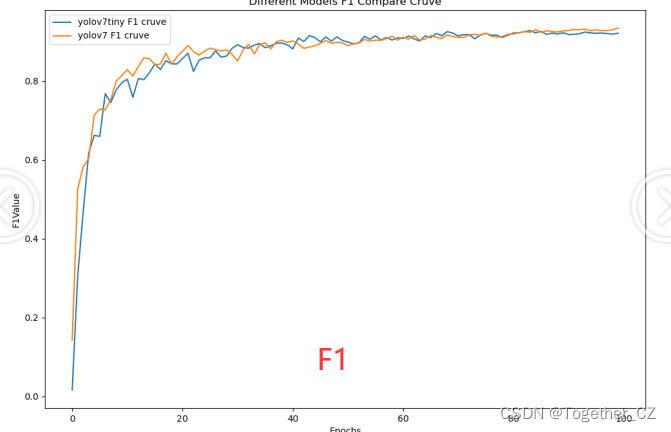
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
【loss曲线】

【Precision曲线】
精确率曲线(Precision-Recall Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。

【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
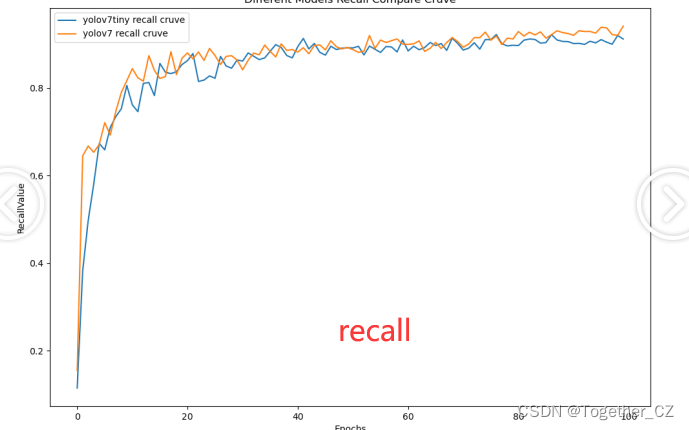
对比来看:tiny轻量级的模型并没有被yolov7拉开明显的差距,但是tiny模型在整体的推理速度上有更多的优势,如果考虑时效性还是推荐选择使用tiny的模型就行,如果更加关注结果可以使用yolov7或者是更大的x系列的模型。在实际应用开发的时候可以考虑如何更好地基于目标检测模型的检测计算结果来产生业务上的有效事件,这里大都是需要结合业务需求来设定合理有效的规则和预警逻辑的,这里暂时不是本文的重点,感兴趣的话都可以自行动手尝试下!