ROS2入门到精通—— 2-13 ROS2实战:实现机器人多目标点导航(附ROS C++代码以及脚本实现)

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://xiahunao.cn/news/3270035.html
如若内容造成侵权/违法违规/事实不符,请联系瞎胡闹网进行投诉反馈,一经查实,立即删除!相关文章
kail-linux如何使用NAT连接修改静态IP
1、Contos修改静态IP
vi /etc/sysconfig/network-scripts/ifcfg-ens33, 标记红色处可能序号会变动
参考linux配置网络不通解决方案_kylinv10sp2 网关不通-CSDN博客https://tanrt06.blog.csdn.net/article/details/132430485?spm1001.2014.3001.5502 Kail时候NAT连…

Java SE 文件上传和文件下载的底层原理
1. Java SE 文件上传和文件下载的底层原理 文章目录 1. Java SE 文件上传和文件下载的底层原理2. 文件上传2.1 文件上传应用实例2.2 文件上传注意事项和细节 3. 文件下载3.1 文件下载应用实例3.2 文件下载注意事项和细节 4. 总结:5. 最后: 2. 文件上传
文件的上传和…

ElasticSearch(三)—文档字段参数设置以及元字段
一、 字段参数设置
analyzer:
指定分词器。elasticsearch 是一款支持全文检索的分布式存储系统,对于 text类型的字段,首先会使用分词器进行分词,然后将分词后的词根一个一个存储在倒排索引中,后续查询主要是针对词根…

模拟实现c++中的vector模版
目录 一vector简述:
二vector的一些接口函数:
1初始化:
2.vector增长:
3vector增删查改:
三vector模拟实现部分主要函数:
1.size,capacity,empty,clear接口:
2.reverse的实现࿱…
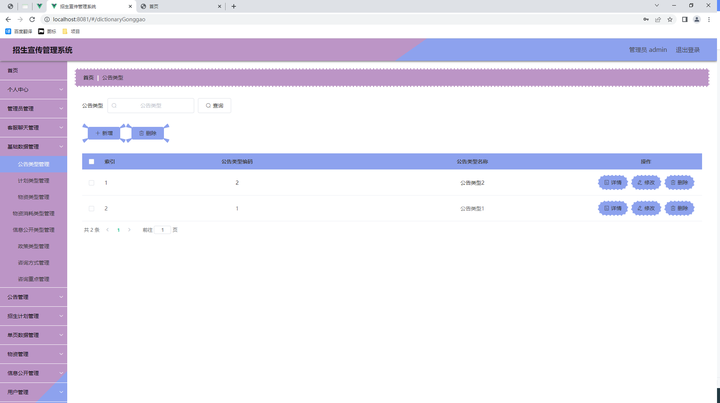
springboot招生宣传管理系统论文源码调试讲解
2 相关技术 2.1 VUE介绍
Vue (读音 /vjuː/,类似于 view) 是一套用于构建用户界面的渐进式框架。与其它大型框架不同的是,Vue 被设计为可以自底向上逐层应用。Vue 的核心库只关注视图层,不仅易于上手,还便于与第三方库或既有项目…

Github 2024-07-27开源项目日报 Top10
根据Github Trendings的统计,今日(2024-07-27统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量非开发语言项目2C++项目2C项目2TypeScript项目1JavaScript项目1Java项目1Python项目1C#项目1免费编程学习平台:freeCodeCamp.org 创建周期:33…

SpringBoot入门实战:SpringBoot整合Shiro
1.背景介绍 SpringBoot是一个用于快速开发Spring应用程序的框架。它的核心是对Spring框架的一层封装,使其更加简单易用。SpringBoot整合Shiro是一种将SpringBoot与Shiro整合的方法,以实现身份验证和授权功能。 Shiro是一个强大的Java安全框架,…

正则表达式 先行/后发断言
参考资料
正则表达式的先行断言(lookahead)和后行断言(lookbehind)正则表达式中分组功能高级用法前瞻断言与后瞻断言初心者歓迎!手と目で覚える正規表現入門・その4(最終回)「中級者テクニックをマスターしよう」 目录 一. Posit…
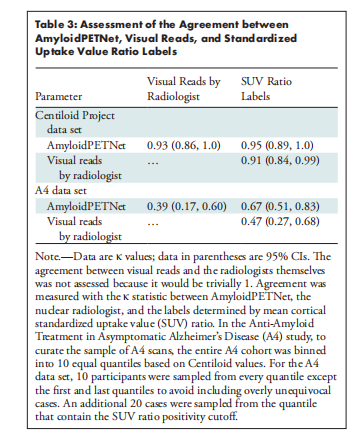
AmyloidPETNet:使用端到端深度学习对脑PET成像中的淀粉样阳性进行分类| 文献速递-AI辅助的放射影像疾病诊断
Title
题目
AmyloidPETNet: Classification of Amyloid Positivity in Brain PET Imaging Using End-to-End Deep Learning
AmyloidPETNet:使用端到端深度学习对脑PET成像中的淀粉样阳性进行分类 01
文献速递介绍
阿尔茨海默病 (AD) 的一个病理异常是脑内淀粉样…

JavaScript——常用库
文章目录 绪论jQuery选择器事件修改 css查找ajax setTimeout与setIntervalsetTimeoutsetInterval requestAnimationFrameMap与SetlocalStorageJSONDateWebSocketwindowcanvas结语 绪论 『时间是伟大的作家,总会写下完美的结局。』—— 「秋之回忆」 jQuery
这个是优…

AI绘画:艺术与科技融合的新篇章
随着人工智能(AI)技术的飞速发展,AI绘画作为一种新兴的艺术形式,正逐步改变着传统艺术创作的格局。从早期的简单模仿到如今的个性化创作,AI绘画不仅提升了艺术创作的效率和质量,还开辟了全新的应用场景和商…

sizeof和strlen区别
如图,sizeof来计算的时候,得出的是计算机用多少个字节来表示一个地址 而strlen来计算的时候,只是计算出他的有效字符长度 打印出的不同地址就是其不同的区别

【深海王国】小学生都能玩的单片机!番外1:Arduino家族Uno-Mega-Nano-Pro Mini-ATtiny85的使用指南(3)
Hi٩(๑ ^ o ^ ๑)۶, 各位深海王国的同志们,早上下午晚上凌晨好呀~辛勤工作的你今天也辛苦啦
(o゜▽゜)o☆ 今天大都督继续为大家带来单片机的番外系列——小学生都能玩的单片机!番外1带你快速学习认识Arduino家族:Uno、Mega、Nano、Pro Mi…
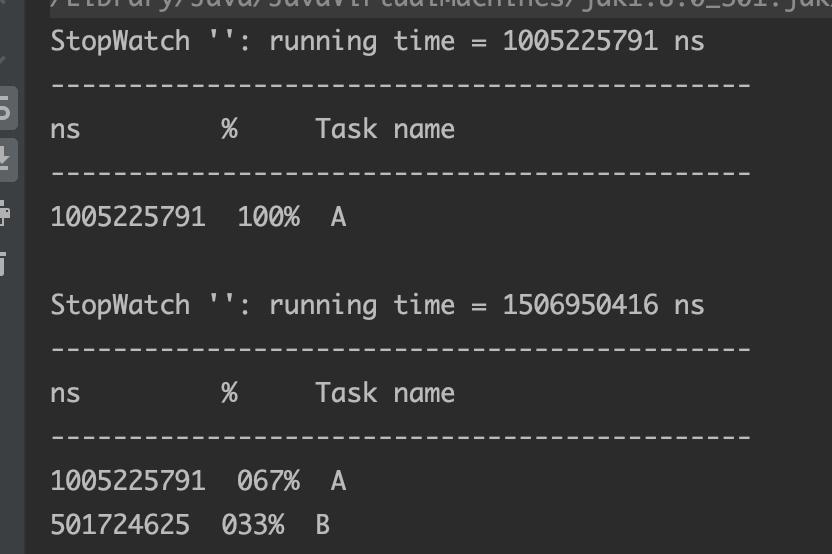
Java小抄|使用StopWatch输出执行耗时
文章目录 背景常用接口定义demo1 统计输出的总耗时demo2 统计最后一个任务的耗时demo3 统计多个任务的耗时占比 背景
StopWatch是spring-framwork提供的一个可以对任务执行时间进行控制的类,方便记录任务的开始时间和结束时间
常用接口定义
getTotalTimeSeconds(…
秒懂C++之string类(下)
目录 一.接口说明
1.1 erase
1.2 replace(最好别用)
1.3 find
1.4 substr
1.5 rfind
1.6 find_first_of
1.7 find_last_of
二.string类的模拟实现
2.1 构造
2.2 无参构造
2.3 析构
2.4.【】运算符
2.5 迭代器
2.6 打印
2.7 reserve扩容
…

网络通信---TCP协议1
今日内容 三次握手: 指建立tcp连接时,需要客户端和服务端总共发送三次报文确认连接。 四次挥手: 断开一个tcp连接,需要客户端和服务端发送四个报文以确认断开。 编程模型 TCP报文 客户端 服务端

Charles实战(三)
第一章节:过滤
Filter Focus Recording Settings - Include
Filter Focus
第二章:重发
简单重发:鼠标右键- Repeat 简单压力: 鼠标右键 - Repeat Advanced Iterations:重复发送多少次 20 Concurrency:每次发几组请求&#x…

23 Python常用内置函数——map()
内置函数 map() 把一个函数 func 依次映射到序列或迭代器对象的每个元素上,并返回一个可迭代的 map 对象作为结果,map 对象中的每个元素是原序列中元素经过函数 func 处理后的结果,map() 函数不对原序列或迭代器对象做任何修饰。
print(map(…

数字图像处理和机器视觉中的常用特殊矩阵及MATLAB实现详解
一、前言 Matlab的名称来源于“矩阵实验室(Matrix Laboratory)”,其对矩阵的操作具有先天性的优势(特别是相对于C语言的数组来说)。在数字图像处理和机器视觉实践中,为了提高编程效率,MATLAB 提…