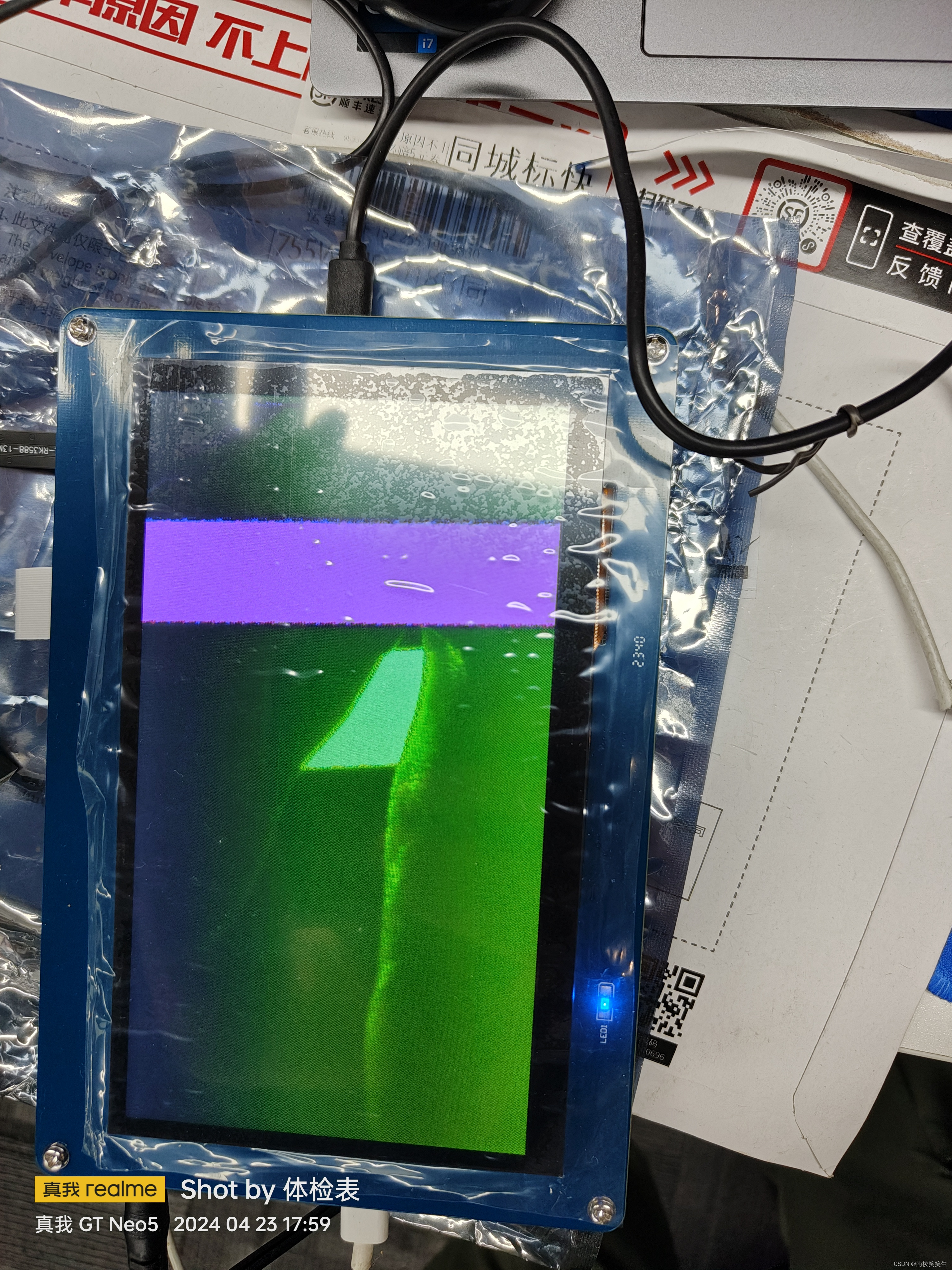
20240423给飞凌的OK3588-C开发板适配OV13855【绿屏】查找问题
2024/4/23 19:43
修改2个部分:
1、DTS中CAM1由ISP0处理修改为ISP1处理。【感觉修改为ISP1之后就不出错了,难道ISP0有问题?】
2、ov13855.c修改为 荣品的RK3588开发板提供的SDK Android12中获取的。【经过比对,感觉驱动改变不大!但是不做验证了】
https://item.taobao.com/item.htm?_u=nju3ku6aea&id=673538773484&skuId=5090826703397&spm=a1z09.2.0.0.34982e8dDrTMCB
瑞芯微RK3588开发板RK3588核心板rockchip 八核8K荣品RD-RK3588
RD-RK3588 链接:https://pan.baidu.com/s/1WAlkzARDpxV-2fd8gSPDiA 提取码:2*45
置顶发给新成员常见问题可以在Redmine 上在右上角搜索对应芯片型号查看
http://39.98.161.150:3088/issues/173
对应平台的的指导文档 可以通过wiki 查看
http://39.98.161.150:3000/#/
相关网站 若打不开请复制网页链接到游览器 或更换 Google Chrome 打开
对应版型的资料在群文件或 群公...
展开
653人已读
【初始分析结论】
1、由于OV13855的硬件是4LANE的,初始怀疑是否因为只接受到2LANE的数据。【还有2LANE丢失了所以发绿】
在ov13855.c的每一个函数都加入打印,经过跟踪代码,发现ov13855.c默认写死为4lane,
并且给0x3016寄存器写入了0x72。
今后方便的时候,可以增加设备节点,在打开摄像头的时候,直接读取0x3016寄存器,确定是几LANE在工作!
或者在/sys/class中增加访问访问节点!
当然也可以通过示波器/逻辑分析仪测量MIPI信号【HS信号需要高端仪器,千元机逻辑分析仪即可测试LP信号】
2、更换为ISP1之后OV13855貌似就不闪退了。
3、绿色偏色的问题根据百度找到的CSDN的解释,说是驱动的问题。但是这个驱动在Orange pi5的Android12下可以正常点亮OV13855的,并以4K分辨率正常录像。当然接到飞凌OK3588-C和Orange pi5上的OV13855不是同一个!
https://blog.csdn.net/lj13329216157/article/details/132663037
RV1126 Linux IPC摄像机 索尼IMX415 摄像头调试
如果看到图像颜色不对、充满条纹等情况。像这样:
先别慌,至少有图像了不是。到这一步了至少说明通信时没问题了。应该检查摄像头参数或者驱动有没有设置对。由于驱动是系统自带的,出问题的可能性很小,我们先不管他。
详细的调试步骤:
1、看下在/etc/iqfiles目录下都有什么文件,另外,摄像头适配信息用需要下面的命令排查下,
root@ok3588:/etc/iqfiles#
root@ok3588:/etc/iqfiles# ls -l
total 15208
-rw-r--r-- 1 root root 294239 Mar 9 2023 gc02m2_LMM248_M2116A-223.json
-rw-r--r-- 1 root root 294091 Mar 9 2023 gc02m2_SLD-S10-M258-V1_TR215-H211.json
-rw-r--r-- 1 root root 294069 Mar 9 2023 gc02m2_THDS11073_YH-021B.json
-rw-r--r-- 1 root root 294128 Mar 9 2023 gc02m2_default_M216A.json
-rw-r--r-- 1 root root 293649 Mar 9 2023 gc2053_default_JX8006.json
-rw-r--r-- 1 root root 294204 Mar 9 2023 gc2093_SIDB205300385-VA_default.json
-rw-r--r-- 1 root root 294129 Mar 9 2023 gc2093_default_JX8006.json
-rw-r--r-- 1 root root 256457 Mar 9 2023 gc2385_HS5885-BNSM1018-V01_default.json
-rw-r--r-- 1 root root 292956 Mar 9 2023 gc4663_KS-ND-M1-V2_6040-A41-650IR.json
-rw-r--r-- 1 root root 293920 Mar 9 2023 gc5025_KYT-8647-V1_OPT532.json
-rw-r--r-- 1 root root 404181 Mar 9 2023 gc5035_XHG-RKX11F-V5_HR232H65.json
-rw-r--r-- 1 root root 294256 Mar 9 2023 gc5035_default_M512.json
-rw-r--r-- 1 root root 293492 Mar 9 2023 gc5035_default_PC5322-M5.json
-rw-r--r-- 1 root root 293941 Mar 9 2023 gc8034_RK-CMK-8M-2-v1_CK8401.json
-rw-r--r-- 1 root root 293996 Mar 9 2023 hi556_KYT-8607-V1.0_default.json
-rw-r--r-- 1 root root 293981 Mar 9 2023 hi846_KYT-8648-V1_YG589.json
-rw-r--r-- 1 root root 445263 Mar 9 2023 imx327_CMK-OT1607-FV1_M12-40IRC-4MP-F16.json
-rw-r--r-- 1 root root 689785 Mar 9 2023 imx415_CMK-OT2022-PX1_IR0147-50IRC-8M-F20.json
-rw-r--r-- 1 root root 804694 Mar 9 2023 imx464_CMK-OT1980-PX1_SHG102.json
-rw-r--r-- 1 root root 404659 Mar 9 2023 os04a10_CMK-OT1607-FV1_M12-40IRC-4MP-F16.json
-rw-r--r-- 1 root root 404194 Mar 9 2023 os04a10_CMK-OT1607-FV1_M12-60IRC-4MP-F16.json
-rw-r--r-- 1 root root 1544148 Mar 9 2023 os04a10_DH3588AVS6_default.json
-rw-r--r-- 1 root root 682975 Mar 9 2023 os04a10hk_CMK-OT1607-FV1_M12-40IRC-4MP-F16.json
-rw-r--r-- 1 root root 294181 Mar 9 2023 os08a10_RS-8MTP659-V1_default.json
-rw-r--r-- 1 root root 301041 Mar 9 2023 ov13850_ZC-OV13850R2A-V1_Largan-50064B31.json
-rw-r--r-- 1 root root 236952 Sep 15 2023 ov13850_forlinx_default.json
-rw-r--r-- 1 root root 338139 Mar 9 2023 ov13855_CMK-OT2016-FV1_default.json
-rw-r--r-- 1 root root 442537 Mar 9 2023 ov50c40_HZGA06_ZE0082C1.json
-rw-r--r-- 1 root root 404985 Mar 9 2023 ov5648_LMM248_YXC-M804A2.json
-rw-r--r-- 1 root root 404743 Mar 9 2023 ov5648_THDS11073_Largan-40122a1.json
-rw-r--r-- 1 root root 404649 Mar 9 2023 ov5670_LM50A60-V2_YXC-M804A2.json
-rw-r--r-- 1 root root 255381 Mar 9 2023 ov5695_TongJu_CHT842-MD.json
-rw-r--r-- 1 root root 404611 Mar 9 2023 ov8858_HS5885-BNSM1018-V01_default.json
-rw-r--r-- 1 root root 294070 Mar 9 2023 ov8858_HS8858-EB1008-V02_JX0843.json
-rw-r--r-- 1 root root 294049 Mar 9 2023 ov8858_SLD-S10-M258-V1_DL820B-D.json
-rw-r--r-- 1 root root 404292 Mar 9 2023 ov8858_XHG-RKX11B-V10_default.json
-rw-r--r-- 1 root root 404577 Mar 9 2023 s5k5e9_SHVK11-V3_HX-M0568E.json
-rw-r--r-- 1 root root 301122 Mar 9 2023 sc200ai_default_TP-8009A-IR.json
-rw-r--r-- 1 root root 293872 Mar 9 2023 sc200ai_default_TP-8009A-RGB.json
-rw-r--r-- 1 root root 294103 Mar 9 2023 sp250a_LM50A60-V2_M2116A-223.json
root@ok3588:/etc/iqfiles#
2、v4l2-ctl --list-devices
root@ok3588:/etc/iqfiles#
root@ok3588:/etc/iqfiles# v4l2-ctl --list-devices
rk_hdmirx (fdee0000.hdmirx-controller):
/dev/video17
rkisp-statistics (platform: rkisp):
/dev/video15
/dev/video16
rkcif-mipi-lvds (platform:rkcif):
/dev/media0
rkcif (platform:rkcif-mipi-lvds):
/dev/video0
/dev/video1
/dev/video2
/dev/video3
/dev/video4
/dev/video5
/dev/video6
/dev/video7
rkisp_mainpath (platform:rkisp1-vir0):
/dev/video8
/dev/video9
/dev/video10
/dev/video11
/dev/video12
/dev/video13
/dev/video14
/dev/media1
root@ok3588:/etc/iqfiles#
3、media-ctl -p -d /dev/media* 具体设备号需要看您适配的哪个
root@ok3588:/etc/iqfiles# media-ctl -p -d /dev/media*
Media controller API version 5.10.66
Media device information
------------------------
driver rkcif
model rkcif-mipi-lvds
serial
bus info
hw revision 0x0
driver version 5.10.66
Device topology
- entity 1: stream_cif_mipi_id0 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video0
pad0: Sink
<- "rockchip-mipi-csi2":1 [ENABLED]
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
- entity 5: stream_cif_mipi_id1 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video1
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 [ENABLED]
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
- entity 9: stream_cif_mipi_id2 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video2
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 [ENABLED]
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
- entity 13: stream_cif_mipi_id3 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video3
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 [ENABLED]
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
- entity 17: rkcif_scale_ch0 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video4
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 [ENABLED]
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
- entity 21: rkcif_scale_ch1 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video5
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 [ENABLED]
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 []
- entity 25: rkcif_scale_ch2 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video6
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 [ENABLED]
<- "rockchip-mipi-csi2":8 []
- entity 29: rkcif_scale_ch3 (1 pad, 8 links)
type Node subtype V4L flags 0
device node name /dev/video7
pad0: Sink
<- "rockchip-mipi-csi2":1 []
<- "rockchip-mipi-csi2":2 []
<- "rockchip-mipi-csi2":3 []
<- "rockchip-mipi-csi2":4 []
<- "rockchip-mipi-csi2":5 []
<- "rockchip-mipi-csi2":6 []
<- "rockchip-mipi-csi2":7 []
<- "rockchip-mipi-csi2":8 [ENABLED]
- entity 33: rockchip-mipi-csi2 (9 pads, 65 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR10_1X10/4224x3136 field:none
crop.bounds:(0,0)/4224x3136
crop:(0,0)/4224x3136]
<- "rockchip-csi2-dphy0":1 [ENABLED]
pad1: Source
-> "stream_cif_mipi_id0":0 [ENABLED]
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
pad2: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 [ENABLED]
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
pad3: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 [ENABLED]
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
pad4: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 [ENABLED]
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
pad5: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 [ENABLED]
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
pad6: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 [ENABLED]
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 []
pad7: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 [ENABLED]
-> "rkcif_scale_ch3":0 []
pad8: Source
-> "stream_cif_mipi_id0":0 []
-> "stream_cif_mipi_id1":0 []
-> "stream_cif_mipi_id2":0 []
-> "stream_cif_mipi_id3":0 []
-> "rkcif_scale_ch0":0 []
-> "rkcif_scale_ch1":0 []
-> "rkcif_scale_ch2":0 []
-> "rkcif_scale_ch3":0 [ENABLED]
- entity 43: rockchip-csi2-dphy0 (2 pads, 2 links)
type V4L2 subdev subtype Unknown flags 0
device node name /dev/v4l-subdev1
pad0: Sink
[fmt:SBGGR10_1X10/4224x3136@10000/300000 field:none
crop.bounds:(0,0)/4224x3136]
<- "m00_b_ov13855 3-0036":0 [ENABLED]
pad1: Source
-> "rockchip-mipi-csi2":0 [ENABLED]
- entity 48: m00_b_ov13855 3-0036 (1 pad, 1 link)
type V4L2 subdev subtype Sensor flags 0
device node name /dev/v4l-subdev2
pad0: Source
[fmt:SBGGR10_1X10/4224x3136@10000/300000 field:none
crop.bounds:(0,0)/4224x3136]
-> "rockchip-csi2-dphy0":0 [ENABLED]
- entity 52: m00_b_vm149c 3-000c (0 pad, 0 link)
type V4L2 subdev subtype Lens flags 0
device node name /dev/v4l-subdev3
root@ok3588:/etc/iqfiles#
root@ok3588:/etc/iqfiles#
【摄像头介入CAM0】
4、另外您是预览的哪个video节点呢?
/dev/video0
/dev/video1
/dev/video2
/dev/video3
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw, format=NV12, width=3840,height=2160, framerate=30/1 ! waylandsink
/dev/video4
/dev/video5
/dev/video6
/dev/video7
【打开出错了】
5、打开摄像头之后的隐患排查:
[ 914.097118] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value
[ 914.097124] rockchip-csi2-dphy csi2-dcphy0: csi2_dphy_update_sensor_mbus fail to get dphy param, used default value
开关 飞凌开发板 附带的 OV13850。就会出现 警告信息。看字面 意思是在 驱动中更新 DPHY/MIPI的 信息失败了?请问 是啥原因呢?
ov13850在驱动中没有注册get_param函数,实际这个函数并不影响使用
Y:\OK3588_Linux_fs\kernel\drivers\phy\rockchip\phy-rockchip-csi2-dphy.c
if (dphy->drv_data->vendor == PHY_VENDOR_SAMSUNG) {
ret = v4l2_subdev_call(sensor_sd, core, ioctl,
RKMODULE_GET_CSI_DPHY_PARAM,
dphy->dphy_param);
if (ret) {
dev_info(dphy->dev, "%s fail to get dphy param, used default value\n",
__func__);
ret = 0;
}
}
6、在Ubuntu下用ll命令习惯了,不想老是打ls -l,请问OK3588-C下如何增加 ll 命令呢?
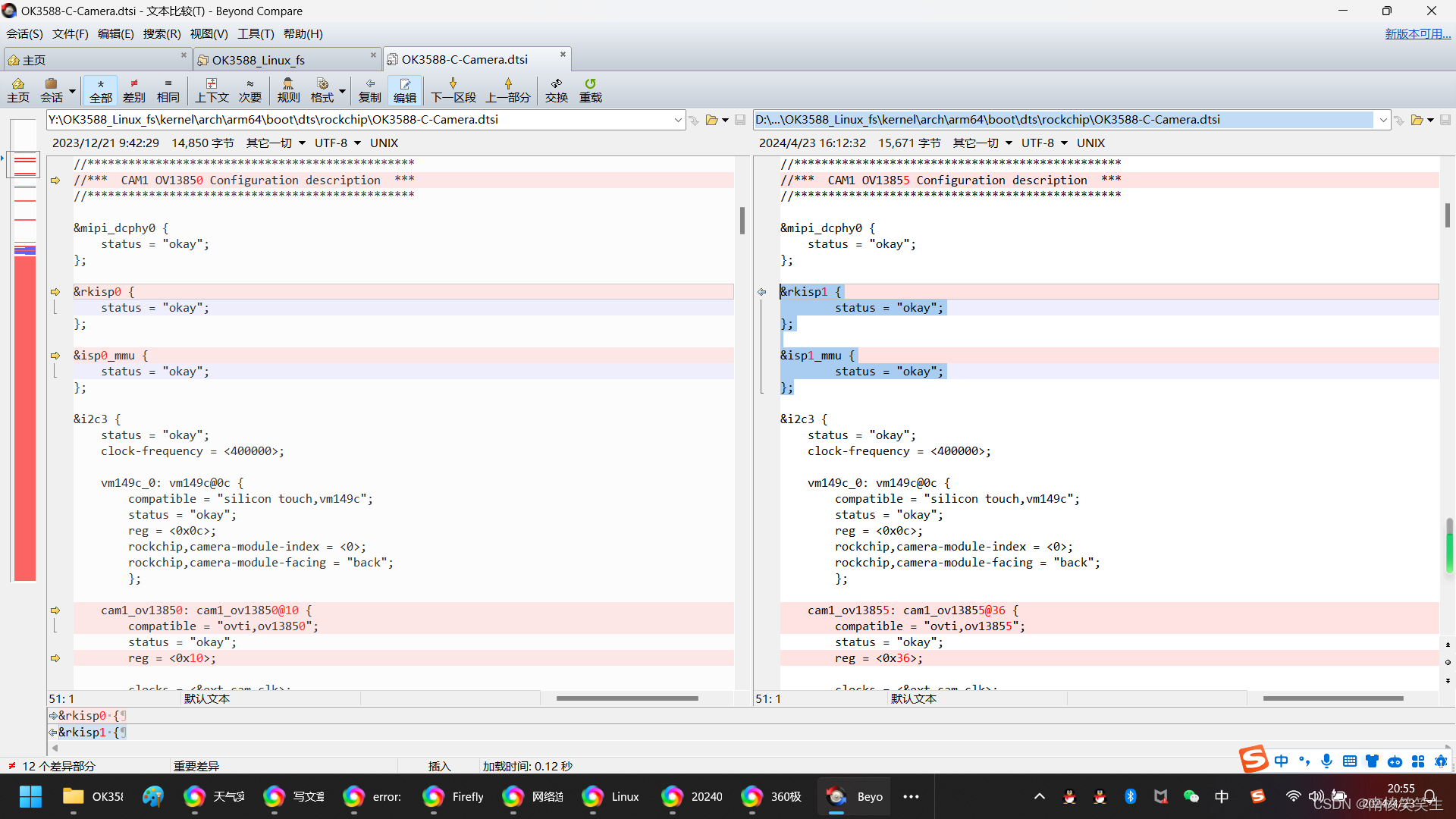
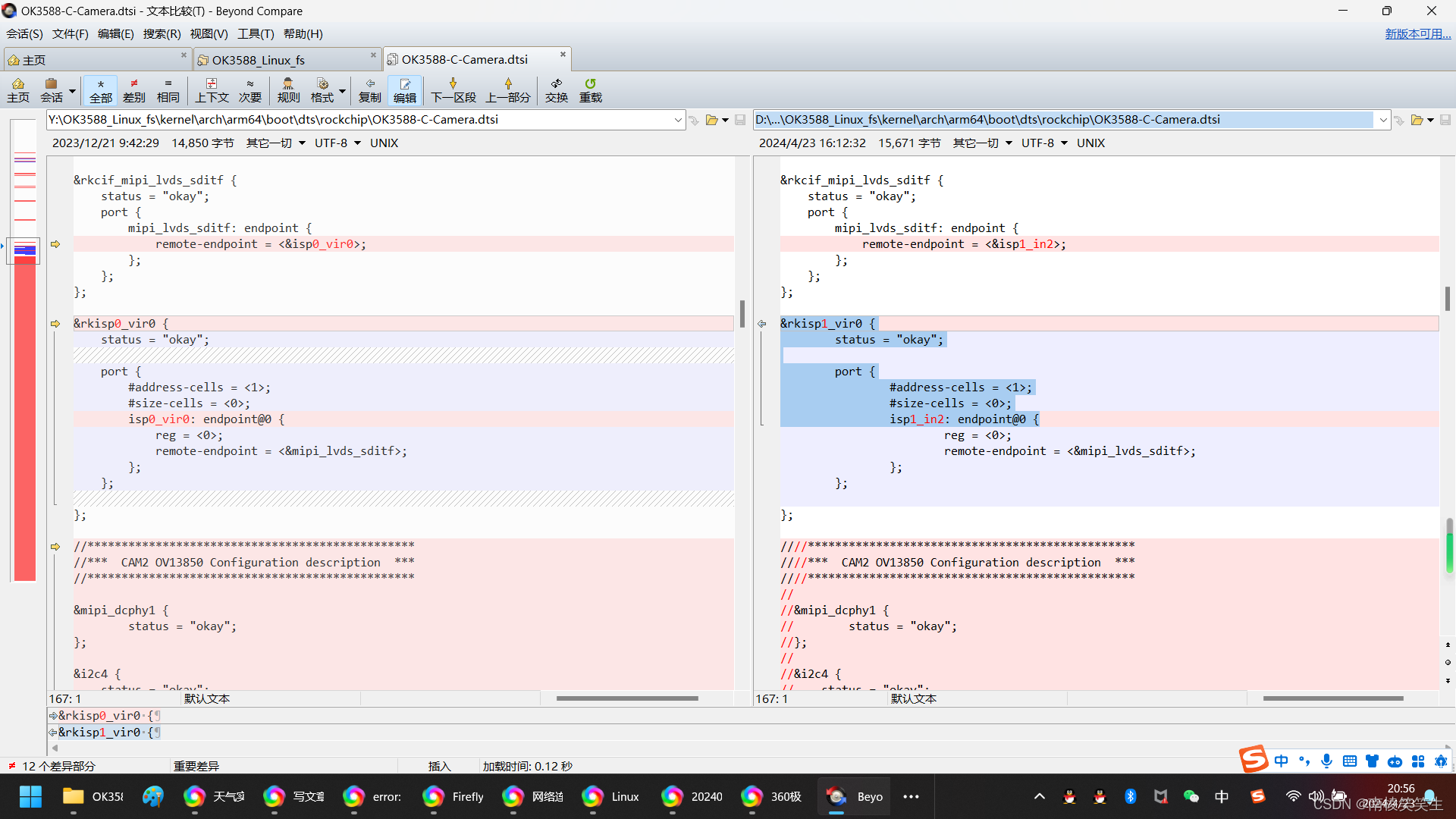
Y:\OK3588_Linux_fs\kernel\arch\arm64\boot\dts\rockchip\OK3588-C-Camera.dtsi
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2022 Forlinx Co., Ltd.
*
* rkisp0 --> rkisp0_vir0/rkisp0_vir1/rkisp0_vir2/rkisp0_vir3
* rkisp1 --> rkisp1_vir0/rkisp1_vir1/rkisp1_vir2/rkisp1_vir3
* rkcif_mipi_lvds --> rkcif_mipi_lvds[0-4]_sditf
* mipicamera0 --> csi2_dcphy0 --> mipi0_csi2 -->rkcif_mipi_lvds --> rkcif_mipi_lvds_sditf --> rkisp0_vir0
* mipicamera1 --> csi2_dcphy1 --> mipi1_csi2 -->rkcif_mipi_lvds1 --> rkcif_mipi_lvds1_sditf --> rkisp0_vir1
* csi2_dphy0 or (csi2_dphy1、csi2_dphy2) dphy0
* csi2_dphy3 or (csi2_dphy4、csi2_dphy5) dphy1
* mipicamera2 --> csi2_dphy1 --> mipi2_csi2 -->rkcif_mipi_lvds2 -->rkcif_mipi_lvds2_sditf --> rkisp0_vir2
* mipicamera3 --> csi2_dphy2 --> mipi3_csi2 -->rkcif_mipi_lvds3 -->rkcif_mipi_lvds3_sditf --> rkisp1_vir0
* mipicamera4 --> csi2_dphy4 --> mipi4_csi2 -->rkcif_mipi_lvds4 -->rkcif_mipi_lvds4_sditf --> rkisp1_vir1
* mipicamera5 --> csi2_dphy5 --> mipi5_csi2 -->rkcif_mipi_lvds5 -->rkcif_mipi_lvds5_sditf --> rkisp1_vir2
* mipicamera6 --> rkcif_dvp ---> rkcif_dvp_sditf
*/
/ {
ext_cam_clk: external-camera-clock {
compatible = "fixed-clock";
clock-frequency = <24000000>;
clock-output-names = "CLK_CAMERA_24MHZ";
#clock-cells = <0>;
};
};
&rkcif {
status = "okay";
};
&rkcif_mmu {
status = "okay";
};
//************************************************
//*** CAM1 OV13855 Configuration description ***
//************************************************
&mipi_dcphy0 {
status = "okay";
};
&rkisp1 {
status = "okay";
};
&isp1_mmu {
status = "okay";
};
&i2c3 {
status = "okay";
clock-frequency = <400000>;
vm149c_0: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
cam1_ov13855: cam1_ov13855@36 {
compatible = "ovti,ov13855";
status = "okay";
reg = <0x36>;
clocks = <&ext_cam_clk>;
clock-names = "xvclk";
pwdn-gpios = <&extio EXTIO_GPIO_P01 GPIO_ACTIVE_HIGH>;
reset-gpios = <&extio EXTIO_GPIO_P00 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "forlinx";
rockchip,camera-module-lens-name = "default";
lens-focus = <&vm149c_0>;
port {
cam1_ov13855_out: endpoint {
remote-endpoint = <&mipi_in_0_ucam1>;
data-lanes = <1 2 3 4>;
};
};
};
};
&csi2_dcphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_0_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam1_ov13855_out>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidcphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi0_csi2_input>;
};
};
};
};
&mipi0_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_input: endpoint@0 {
reg = <0>;
remote-endpoint = <&csidcphy0_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds0>;
};
};
};
};
&rkcif_mipi_lvds {
status = "okay";
port {
cif_mipi_lvds0: endpoint {
remote-endpoint = <&mipi0_csi2_output>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
mipi_lvds_sditf: endpoint {
remote-endpoint = <&isp1_in2>;
};
};
};
&rkisp1_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp1_in2: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
************************************************
*** CAM2 OV13850 Configuration description ***
************************************************
//
//&mipi_dcphy1 {
// status = "okay";
//};
//
//&i2c4 {
// status = "okay";
// clock-frequency = <400000>;
//
// vm149c_1: vm149c@0c {
// compatible = "silicon touch,vm149c";
// status = "okay";
// reg = <0x0c>;
// rockchip,camera-module-index = <1>;
// rockchip,camera-module-facing = "back";
// };
//
// cam2_ov13850: cam2_ov13850@10 {
// compatible = "ovti,ov13850";
// status = "okay";
// reg = <0x10>;
//
// clocks = <&ext_cam_clk>;
// clock-names = "xvclk";
//
// pwdn-gpios = <&extio EXTIO_GPIO_P03 GPIO_ACTIVE_HIGH>;
// reset-gpios = <&extio EXTIO_GPIO_P02 GPIO_ACTIVE_HIGH>;
// rockchip,camera-module-index = <1>;
// rockchip,camera-module-facing = "front";
// rockchip,camera-module-name = "forlinx";
// rockchip,camera-module-lens-name = "default";
// lens-focus = <&vm149c_1>;
//
// port {
// cam2_ov13850_out: endpoint {
// remote-endpoint = <&mipi_in_1_ucam2>;
// data-lanes = <1 2>;
// };
// };
// };
//};
//
//&csi2_dcphy1 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi_in_1_ucam2: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&cam2_ov13850_out>;
// data-lanes = <1 2>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// csidcphy1_out: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&mipi1_csi2_input>;
// };
// };
// };
//};
//
//&mipi1_csi2 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi1_csi2_input: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&csidcphy1_out>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi1_csi2_output: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&cif_mipi_lvds1>;
// };
// };
// };
//};
//
//&rkcif_mipi_lvds1 {
// status = "okay";
// port {
// cif_mipi_lvds1: endpoint {
// remote-endpoint = <&mipi1_csi2_output>;
// };
// };
//};
//
//&rkcif_mipi_lvds1_sditf {
// status = "okay";
// port {
// mipi_lvds1_sditf: endpoint {
// remote-endpoint = <&isp0_vir1>;
// };
// };
//};
//
//&rkisp0_vir1 {
// status = "okay";
// port {
// #address-cells = <1>;
// #size-cells = <0>;
// isp0_vir1: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&mipi_lvds1_sditf>;
// };
// };
//};
//
************************************************
*** CAM3 OV5645 Configuration Description ****
************************************************
//
//&csi2_dphy0_hw {
// status = "okay";
//};
//
//&i2c7 {
// status = "okay";
// clock-frequency = <400000>;
//
// cam3_ov5645: cam3_ov5645@3c {
// compatible = "ovti,ov5645";
// status = "okay";
// reg = <0x3c>;
//
// clocks = <&ext_cam_clk>;
// clock-names = "xclk";
// clock-frequency = <24000000>;
//
// enable-gpios = <&extio EXTIO_GPIO_P05 GPIO_ACTIVE_HIGH>;
// reset-gpios = <&extio EXTIO_GPIO_P04 GPIO_ACTIVE_LOW>;
// rockchip,camera-module-index = <0>;
// rockchip,camera-module-facing = "back";
// rockchip,camera-module-name = "NC";
// rockchip,camera-module-lens-name = "NC";
//
// port {
// cam3_ov5645_out: endpoint {
// remote-endpoint = <&mipi_in_ucam3>;
// data-lanes = <1 2>;
// };
// };
// };
//};
//
//&csi2_dphy0 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi_in_ucam3: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&cam3_ov5645_out>;
// data-lanes = <1 2>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi2_csi2_mipicsi0_out0: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&mipi2_csi2_input>;
// };
// };
// };
//};
//
//&mipi2_csi2 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi2_csi2_input: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&mipi2_csi2_mipicsi0_out0>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi2_csi2_output: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&cif_mipi_lvds2>;
// };
// };
// };
//};
//
//&rkcif_mipi_lvds2 {
// status = "okay";
// port {
// cif_mipi_lvds2: endpoint {
// remote-endpoint = <&mipi2_csi2_output>;
// };
// };
//};
//
//&rkcif_mipi_lvds2_sditf {
// status = "disabled";
//};
//
************************************************
*** CAM4 OV5645 Configuration Description ****
************************************************
//
//&csi2_dphy1_hw {
// status = "okay";
//};
//
//&i2c3 {
// status = "okay";
//
// cam4_ov5645: cam4_ov5645@3c {
// status = "okay";
// compatible = "ovti,ov5645";
// reg = <0x3c>;
// clocks = <&ext_cam_clk>;
// clock-names = "xclk";
// clock-frequency = <24000000>;
//
// reset-gpios = <&extio EXTIO_GPIO_P06 GPIO_ACTIVE_LOW>;
// enable-gpios = <&extio EXTIO_GPIO_P07 GPIO_ACTIVE_HIGH>;
//
// rockchip,camera-module-index = <1>;
// rockchip,camera-module-facing = "front";
// rockchip,camera-module-name = "NC";
// rockchip,camera-module-lens-name = "NC";
// port {
// cam4_ov5645_out: endpoint {
// remote-endpoint = <&mipi_in_ucam4>;
// data-lanes = <1 2>;
// };
// };
// };
//};
//
//&csi2_dphy4 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi_in_ucam4: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&cam4_ov5645_out>;
// data-lanes = <1 2>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi4_csi2_csidphy1_out0: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&mipi4_csi2_input>;
// };
// };
// };
//};
//
//&mipi4_csi2 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi4_csi2_input: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&mipi4_csi2_csidphy1_out0>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi4_csi2_output: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&cif_mipi_in4>;
// };
// };
// };
//};
//
//&rkcif_mipi_lvds4 {
// status = "okay";
// port {
// cif_mipi_in4: endpoint {
// remote-endpoint = <&mipi4_csi2_output>;
// };
// };
//};
//
//&rkcif_mipi_lvds4_sditf {
// status = "disabled";
//};
//
************************************************
*** CAM5 OV5645 Configuration Description ****
************************************************
//
//&i2c4 {
// status = "okay";
//
// cam5_ov5645: cam5_ov5645@3c {
// status = "okay";
// compatible = "ovti,ov5645";
// reg = <0x3c>;
// clocks = <&ext_cam_clk>;
// clock-names = "xclk";
// clock-frequency = <24000000>;
//
// reset-gpios = <&extio EXTIO_GPIO_P10 GPIO_ACTIVE_LOW>;
// enable-gpios = <&extio EXTIO_GPIO_P11 GPIO_ACTIVE_HIGH>;
//
// rockchip,camera-module-index = <2>;
// rockchip,camera-module-facing = "front";
// rockchip,camera-module-name = "NC";
// rockchip,camera-module-lens-name = "NC";
// port {
// cam5_ov5645_out: endpoint {
// remote-endpoint = <&mipi_in_ucam5>;
// data-lanes = <1 2>;
// };
// };
// };
//};
//
//&csi2_dphy5 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi_in_ucam5: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&cam5_ov5645_out>;
// data-lanes = <1 2>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi5_csi2_csidphy1_out1: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&mipi5_csi2_input>;
// };
// };
// };
//};
//
//&mipi5_csi2 {
// status = "okay";
// ports {
// #address-cells = <1>;
// #size-cells = <0>;
// port@0 {
// reg = <0>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi5_csi2_input: endpoint@1 {
// reg = <1>;
// remote-endpoint = <&mipi5_csi2_csidphy1_out1>;
// };
// };
// port@1 {
// reg = <1>;
// #address-cells = <1>;
// #size-cells = <0>;
// mipi5_csi2_output: endpoint@0 {
// reg = <0>;
// remote-endpoint = <&cif_mipi_in5>;
// };
// };
// };
//};
//
//&rkcif_mipi_lvds5 {
// status = "okay";
// port {
// cif_mipi_in5: endpoint {
// remote-endpoint = <&mipi5_csi2_output>;
// };
// };
//};
//
//&rkcif_mipi_lvds5_sditf {
// status = "disabled";
//};








![[Flutter3] Json转dart模型举例](https://img-blog.csdnimg.cn/direct/024da5ebeafd43599f3fe01d1f59061d.png)