玩玩二维凸包
前言&注明
最近在学计几(计算几何),然后……

精神状态越来越好了。(阿辉~)
本文只写了二维凸包的一种解法:扫描法。个人认为和 FHQ_Treap 一样,都是解同类问题的算法中易懂且好写。
网上的一些解析有点抽象(对于我),所以打算写一篇易懂(?)的讲解(给未来的自己)。
参考文献:
- 极角(From:百度百科);
- 几何:极角排序详解;
- 数论小白都能看懂的平面凸包详解(From:洛谷,@ShineEternal);
- 凸包(From:OI-Wiki);
- 凸包算法详解(From:CSDN,@努力攻坚操作系统)。
参考文献有点多,这说明了什么?
正式启动之前,先去看看向量和角的弧度制表示法。

极角,启动!
BlastMike:你充710试试?
注意:极角一定要学,这东西没学就别想着学扫描法了。
极角
定义:在极坐标系中,平面上任何一点到极点的连线和极轴的夹角叫做极角。
光看定义十分的抽象,不如结合图来了解。
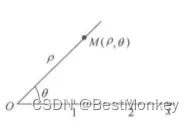
平面上取一定点 O O O,从 O O O 引一条水平射线 O x O_x Ox,规定方向自左至右,再选定一个长度单位并规定角旋转的正方向,通常取逆时针方向,这样就构成了一个极坐标系,如图所示,点 O O O 叫作极点,射线 O x O_x Ox 叫作极轴。
在极坐标系中,平面上任意一点 M M M 的位置,可以由 O M OM OM 的长度 ρ \rho ρ 和从到 O M OM OM 的角 θ \theta θ 来确定,把 ρ \rho ρ 叫作点 M M M 的极径, θ \theta θ 叫作点M的极角,有序实数对 ( ρ , θ ) (\rho,\theta) (ρ,θ) 叫作点M的极坐标,记作 ( ρ , θ ) (\rho,\theta) (ρ,θ)。
特别地,当点 M M M 在极点时,它的坐标是 ( 0 , θ ) (0,\theta) (0,θ), θ \theta θ 可以取任意值,当点M在极轴上时,它的坐标是 ( ρ , 0 ) (\rho,0) (ρ,0), ρ \rho ρ 可以取任意正值。
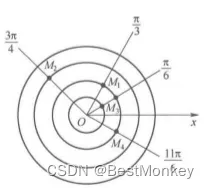
如图2所示,在极坐标系中,各点的极坐标分别为: ( 2 , π 3 ) , ( 3 , 3 π 4 ) , ( 1 , π 6 ) , ( 2 , 11 π 6 ) (2,\frac{\pi}{3}),(3,\frac{3 \pi}{4}),(1,\frac{\pi}{6}),(2,\frac{11 \pi}{6}) (2,3π),(3,43π),(1,6π),(2,611π)。
就学这么多就够了。
极角排序
这里讲利用叉积按极角从小到大排序。
设向量 a → _a^\rarr a→ , b → _b^\rarr b→,的叉积为 x x x。
对于 x x x:
- x = 0 x=0 x=0:是指两向量平行(或者说两向量重合);
- x > 0 x>0 x>0:则 a → _a^\rarr a→ 在向量 b → _b^\rarr b→ 的顺时针方向(可理解为在 a → _a^\rarr a→ 在 b → _b^\rarr b→ 的下方);
- x < 0 x<0 x<0:则 a → _a^\rarr a→ 在 b → _b^\rarr b→ 的逆时针方向(可理解为在 a → _a^\rarr a→ 在 b → _b^\rarr b→ 的上方)。
学扫描法只需要这么多,其他可以自己拓展。
扫描法(Graham算法)开始
先说明这个算法的时间复杂度: O ( n log n ) O(n \log n) O(nlogn)。
扫描法的第一步是对点集进行排序,这样能保证其有序性,从而在后续的处理中达到更高效的效果,所以扫描法比其他普通算法更优的原因。
例题:P2742 [USACO5.1] 圈奶牛Fencing the Cows /【模板】二维凸包 。
详细解释
(图片全 ∑ \sum ∑ 洛谷的,懒得画)
假设共 m m m 个点。
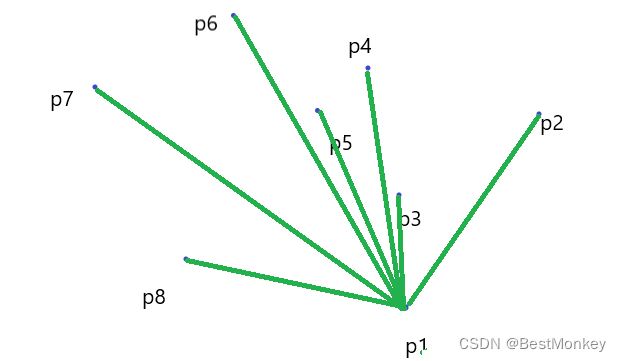
我们选择一个 y y y 值最小的点,如有相同选 x x x 最小的点,记为 P 1 P_1 P1。
剩下的点集中按照极角的大小逆时针排序,然后编号为 P 2 ∼ P m P_2 \sim P_m P2∼Pm
BlastMike:这是在种草?

我们按照排序结束后的顺序枚举每一个点,依次连线,可以使用一个栈来存储,每次入栈,如果即将入栈的元素与栈顶两个元素所构成了一个类似于凹壳(凹!)的东西,那么显然处于顶点的那个点一定不在这个点集的凸包上,而他正好在栈顶,所以把它弹出栈,新点入栈。
但是,新来的点有可能既踢走了栈顶,再连接新的栈顶元素后却发现仍然可以踢出,故此时就不能忘记判断。(不然会趋势)
如果你不想纠缠于繁杂的文字描述(简单地说就是语言认知能力差),那么下面就有动图解说献上。(早该说了)
至此,扫描法解释完成。

由于我们在排序的帮助下省去了一些盲目的扫描,虽然排序作为一个预处理时间复杂度占据了总时间复杂度,但相比 Andrew 算法还是更为优秀。
结合代码
检查叉积
计算叉积,检查叉积是否大于 0 0 0,如果是 a a a 就逆时针转到 b b b。
代码片段:
inline double Cross(Point a, Point b, Point c) {return (b.x - a.x) * (c.y - a.y) - (c.x - a.x) * (b.y - a.y);
}
计算两点之间距离
这就不用解释了吧。
代码片段:
inline double Get_Distance(Point a, Point b) {return sqrt((a.x - b.x) * (a.x - b.x) * 1.0 + (a.y - b.y) * (a.y - b.y) * 1.0);
}
重要的排序函数
注意:这个函数别写错了,要不然功亏一篑。
判断叉积是否大于 0 0 0,若是,则一定满足要求(上面有说)。
特别的,若叉积等于 0 0 0,则说明两向量在同一直线上,要判断他们到 p 0 p_0 p0(初始点)的距离。
代码片段:
inline bool Compar_2(Point a, Point b) {double m = Cross(Stack[0], a, b);if (m > 0)return 1;else if (m == 0 && Get_Distance(Stack[0], a) - Get_Distance(Stack[0], b) <= 0)return 1;else return 0;
}
Code
BlastMike:没有 Code 的 BestMonkey 的博客是没有灵魂的。
#include <bits/stdc++.h>
using namespace std;
struct Point {double x, y;
} P[100005], Stack[100005];
int n, Top = 1;
double Answer;
inline double Cross(Point a, Point b, Point c) {return (b.x - a.x) * (c.y - a.y) - (c.x - a.x) * (b.y - a.y);
}
inline double Get_Distance(Point a, Point b) {return sqrt((a.x - b.x) * (a.x - b.x) * 1.0 + (a.y - b.y) * (a.y - b.y) * 1.0);
}
inline bool Compar_1(Point a, Point b) {if (a.y == b.y)return a.x < b.x;return a.y < b.y;
}
inline bool Compar_2(Point a, Point b) {double m = Cross(Stack[0], a, b);if (m > 0)return 1;else if (m == 0 && Get_Distance(Stack[0], a) - Get_Distance(Stack[0], b) <= 0)return 1;else return 0;
}
signed main() {scanf("%d", &n);for (register int i = 0; i < n; ++i)scanf("%lf%lf", &P[i].x, &P[i].y);if (n == 1) puts("0.00"), exit(0);else if (n == 2) printf("%.2lf\n", Get_Distance(P[0], P[1])), exit(0);else {memset(Stack, 0, sizeof(Stack)), sort(P, P + n, Compar_1), Stack[0] = P[0], sort(P + 1, P + n, Compar_2), Stack[1] = P[1];//最低点一定在凸包里for (register int i = 2; i < n; ++i) {while (Cross(Stack[Top - 1], Stack[Top], P[i]) < 0)//判断前面点的会不会被踢走,如果被踢走那么出栈Top--;Stack[++Top] = P[i];}for (register int i = 0; i < Top; ++i)Answer += Get_Distance(Stack[i], Stack[i + 1]);Answer += Get_Distance(Stack[0], Stack[Top]), printf("%.2lf\n", Answer), exit(0);}return 0;
}
后记



![[2024更新]如何从Android恢复已删除的相机照片?](https://img-blog.csdnimg.cn/direct/3c0f9cd2ecb747a48c1886bd0e1e31a7.png)