目录
1.RGBD2Point
1.2 步骤
2.Point2Voxel-Voxelization
2.1 原理
2.2 代码
3.Voxel2Point
4.Point2RGB
5.Voxel2RGB
1.RGBD2Point
input:RGB + D + 内外惨
output:points cloud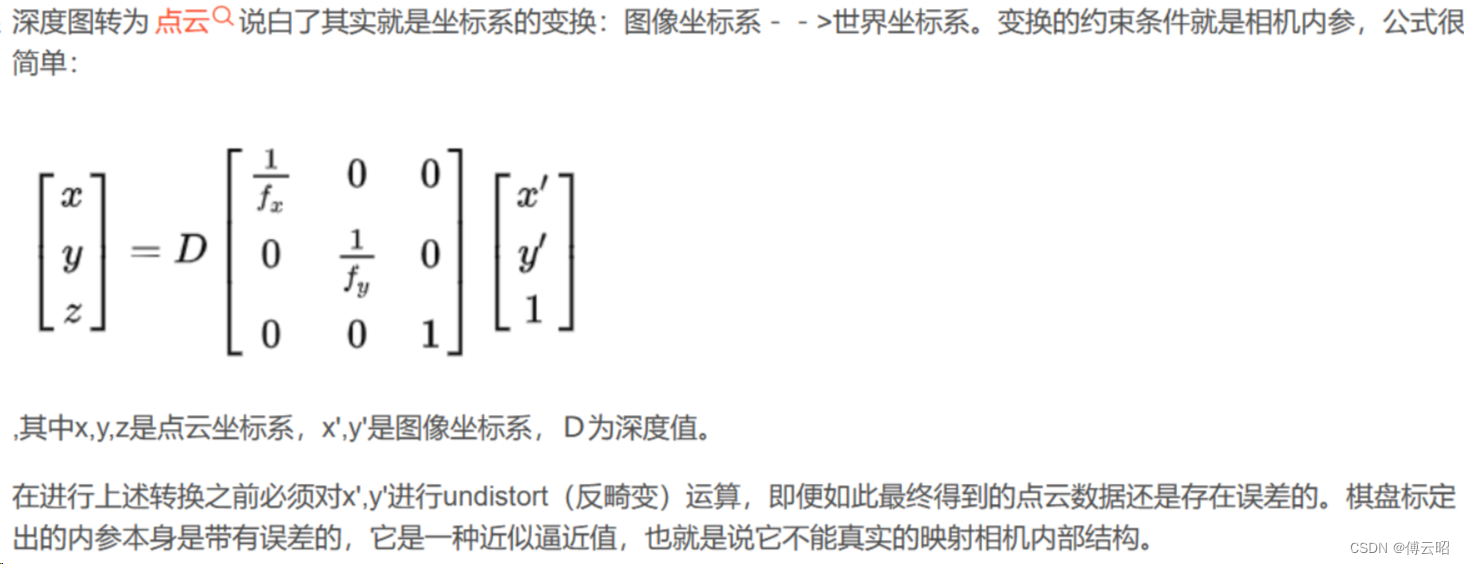
def depth2pcd(depth_img):"""深度图转点云数据图像坐标系 -> 世界坐标系 :param depth_img: 深度图:return: 点云数据 N*3"""# 相机内参cam_fx = 1120.12cam_fy = 1120.12cam_cx = 640.5cam_cy = 360.5factor = 1# 逐点处理,此过程可以使用numpy优化m, n = depth_img.shapepoint_cloud = []for v in range(m):for u in range(n):if depth_img[v, u] == 0:continuedepth = depth_img[v, u]p_z = depth / factor z = 深度/焦距p_x = (u - cam_cx) * p_z / cam_fx p_y = (v - cam_cy) * p_z / cam_fypoint_cloud.append([p_x, p_y, p_z]) # 这里还可以添加RGB信息point_cloud = np.array(point_cloud)return point_cloud1.2 步骤
RGBD数据转换为点云的过程通常包括以下步骤:
-
从深度图像中提取点云坐标:使用深度图像中的像素值计算每个像素在三维空间中的坐标。这可以通过将深度值转换为相机坐标系下的坐标来实现。 (X,Y,Z)
-
确定相机内参和外参:相机内参包括相机的焦距、主点和畸变参数等,用于将像素坐标转换为相机坐标系下的坐标。相机外参包括相机在世界坐标系下的位置和方向,用于将相机坐标系下的坐标转换为世界坐标系下的坐标。
-
将深度图像转换为点云坐标:对于每个像素,根据其深度值和相机内参,可以计算出其在相机坐标系下的坐标。然后,根据相机外参,可以将相机坐标系下的坐标转换为世界坐标系下的坐标。这样就可以得到每个像素对应的点云坐标。
-
去除无效点:深度图像中可能包含一些无效点,例如深度值为0或超出一定范围的点。这些点需要被去除,以保证点云的质量和准确性。
-
可选:对点云进行滤波和重采样:为了减少噪声和数据量,可以对点云进行滤波和重采样。例如,可以使用高斯滤波或中值滤波来平滑点云,或使用体素格化和统计滤波来降低点云的密度。
-
-
从RGB图像中提取点云颜色:使用RGB图像中的像素值提取每个点的颜色信息。这可以通过将RGB值与对应的点云坐标进行匹配来实现。 (X,Y, Z,R,G,B)
-
确定相机内参和外参:与从深度图像中提取点云坐标类似,从RGB图像中提取点云颜色也需要相机内参和外参的信息。
-
将RGB图像转换为点云颜色:对于每个点云坐标,可以使用相机内参和外参将其对应到RGB图像上的像素坐标。然后,可以从RGB图像中提取对应像素的颜色信息,例如RGB值或HSV值等。
-
可选:对颜色进行校正和增强:为了提高颜色的准确性和鲁棒性,可以对颜色进行校正和增强。例如,可以使用颜色校正矩阵来校正颜色偏差,或使用直方图均衡化和对比度增强来增强颜色对比度。
-
-
将点云坐标和颜色信息组合成点云:将每个点的坐标和颜色信息组合成一个点云。这可以通过将坐标和颜色信息存储在一个结构体或数组中来实现
2.Point2Voxel-Voxelization
2.1 原理
将点云数据转换为体素(voxel)通常需要进行以下步骤:
-
确定体素大小和边界:体素大小是指体素的边长,它决定了体素的分辨率和精度。边界是指点云数据的空间范围,它决定了体素的数量和大小。
-
将点云数据转换为体素坐标:对于每个点云坐标,可以根据体素大小将其对应到体素坐标系下的坐标。例如,可以将点云坐标除以体素大小并向下取整,以得到其对应的体素坐标。
-
将点云数据分配到体素中:对于每个体素坐标,可以将其对应的点云数据分配到该体素中。例如,可以将该体素中所有点云数据的颜色或法向量进行平均或加权平均,以得到该体素的颜色或法向量信息。
-
可选:对体素进行滤波和重采样:为了减少噪声和数据量,可以对体素进行滤波和重采样。例如,可以使用高斯滤波或中值滤波来平滑体素,或使用体素格化和统计滤波来降低体素的密度。
转换后的体素数据可以用于各种计算机视觉和机器学习任务,例如三维重建、物体识别和姿态估计等。
2.2 代码
import numpy as np
from scipy.spatial import cKDTree
def pointcloud_to_voxel(pointcloud, voxel_size):# 计算体素边界和数量min_bound = np.min(pointcloud, axis=0)max_bound = np.max(pointcloud, axis=0)voxel_count = np.ceil((max_bound - min_bound) / voxel_size).astype(int)# 将点云数据转换为体素坐标voxel_coords = np.floor((pointcloud - min_bound) / voxel_size).astype(int)# 将点云数据分配到体素中voxel_data = np.zeros(voxel_count + 1)for i in range(len(pointcloud)):voxel_data[tuple(voxel_coords[i])] += 1# 可选:对体素进行滤波和重采样# ...return voxel_data3.Voxel2Point
将3D体素数据转换为点云数据通常需要进行以下步骤:
以下是一个简单的Python代码示例,用于将点云数据转换为RGB图像:
-
确定体素大小和边界:体素大小是指体素的边长,它决定了体素的分辨率和精度。边界是指3D体素数据的空间范围,它决定了体素的数量和大小。
-
遍历体素数据,将非空体素转换为点云数据:对于每个非空体素,可以将其转换为一个或多个点云数据。例如,可以将该体素的中心点作为点云数据,或者将该体素中所有非空体素的中心点作为点云数据。
-
可选:对点云数据进行滤波和重采样:为了减少噪声和数据量,可以对点云数据进行滤波和重采样。例如,可以使用高斯滤波或中值滤波来平滑点云数据,或使用体素格化和统计滤波来降低点云数据的密度。
-
import numpy as np def voxel_to_pointcloud(voxel_data, voxel_size):# 计算体素边界和数量min_bound = np.array([0, 0, 0])max_bound = np.array(voxel_data.shape) * voxel_size# 遍历体素数据,将非空体素转换为点云数据pointcloud = []for x in range(voxel_data.shape[0]):for y in range(voxel_data.shape[1]):for z in range(voxel_data.shape[2]):if voxel_data[x, y, z] > 0:pointcloud.append([x * voxel_size, y * voxel_size, z * voxel_size])# 可选:对点云数据进行滤波和重采样# ...return np.array(pointcloud)4.Point2RGB
将点云数据转换为RGB图像通常需要进行以下步骤:
-
确定图像大小和分辨率:图像大小是指图像的宽度和高度,它决定了图像的分辨率和精度。分辨率是指图像中每个像素的大小,通常以像素/英寸(PPI)或像素/厘米(PPC)为单位。
-
将点云数据转换为图像坐标:对于每个点云坐标,可以根据图像大小和分辨率将其对应到图像坐标系下的坐标。例如,可以将点云坐标乘以分辨率并向下取整,以得到其对应的图像坐标。
-
将点云数据分配到图像中:对于每个图像坐标,可以将其对应的点云数据分配到该像素中。例如,可以将该像素中所有点云数据的颜色进行平均或加权平均,以得到该像素的颜色信息。
-
可选:对图像进行滤波和增强:为了减少噪声和提高图像质量,可以对图像进行滤波和增强。例如,可以使用高斯滤波或中值滤波来平滑图像,或使用直方图均衡化和对比度增强来增强图像对比度。
import numpy as np import cv2 def pointcloud_to_rgb(pointcloud, image_size, resolution):# 确定图像大小和分辨率image_width, image_height = image_sizepixel_size = 1 / resolution# 将点云数据转换为图像坐标image_coords = np.floor((pointcloud[:, :2] * resolution)).astype(int)# 将点云数据分配到图像中image_data = np.zeros((image_height, image_width, 3))for i in range(len(pointcloud)):x, y = image_coords[i]image_data[y, x] += pointcloud[i, 2:]# 可选:对图像进行滤波和增强# ...# 将图像数据转换为RGB图像image_data = (image_data / np.max(image_data) * 255).astype(np.uint8)rgb_image = cv2.cvtColor(image_data, cv2.COLOR_BGR2RGB)# 可选:使用OpenCV显示图像cv2.imshow('RGB Image', rgb_image)cv2.waitKey(0)cv2.destroyAllWindows()return rgb_image5.Voxel2RGB
将3D体素数据转换为2D图像通常需要进行以下步骤:
-
确定投影方向和投影平面:投影方向是指将3D体素数据投影到2D图像的方向,通常是x、y或z轴方向。投影平面是指投影方向所在的平面,通常是与另外两个轴垂直的平面。
-
将3D体素数据投影到2D图像:对于每个投影平面上的像素,可以将其对应到3D体素数据中的体素坐标。然后,可以根据投影方向和投影平面,将该体素沿着投影方向上的值投影到2D图像上的像素值中。例如,可以将该体素的最大值或平均值作为该像素的像素值。
-
可选:对2D图像进行滤波和增强:为了减少噪声和提高图像质量,可以对2D图像进行滤波和增强。例如,可以使用高斯滤波或中值滤波来平滑图像,或使用直方图均衡化和对比度增强来增强图像对比度。
-
import numpy as np import cv2 def voxel_to_image(voxel_data):# 确定投影方向和投影平面proj_axis = 2proj_plane = np.delete(np.arange(3), proj_axis)# 将3D体素数据投影到2D图像proj_data = np.max(voxel_data, axis=proj_axis)proj_data = np.transpose(proj_data, axes=proj_plane)# 可选:对2D图像进行滤波和增强# ...# 将2D图像转换为灰度图像proj_data = (proj_data / np.max(proj_data) * 255).astype(np.uint8)# 可选:使用OpenCV显示图像cv2.imshow('Projection', proj_data)cv2.waitKey(0)cv2.destroyAllWindows()return proj_data