一、必须要了解的ARM知识点
1、ARM公司简介
ARM(Advanced RISC Machines)有三种含义:
它是一个公司的名称、它是一类微处理器的通称、它是一种技术的名称。
2、ARM处理器家族
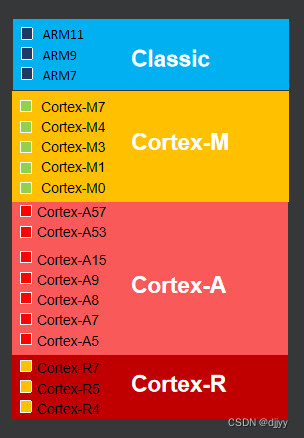
早先经典处理器
包括ARM7、ARM9、ARM11家族。
Cortex-M 系列
为单片机驱动的系统提供的低成本优化方案,应用于传统 的微控制器市场,智能传感器,汽车周边部件等。
Cortex-A 系列
针对开放式操作系统的高性能处理器;
应用于智能手机,数字电视,智能本等高端运用。
Cortex-R 系列
针对实时系统、满足实时性的控制需求;
应于汽车制动系统,动力系统等。
3、ARM处理器架构
概念
体系结构定义指令集和基于这一体系结构下处理器的 编程模型(基本数据类型、工作模型、寄存器组)。基于同种体系结构可以有多种处理器、每个处理器的性能不同,面向的应用领域也不同。
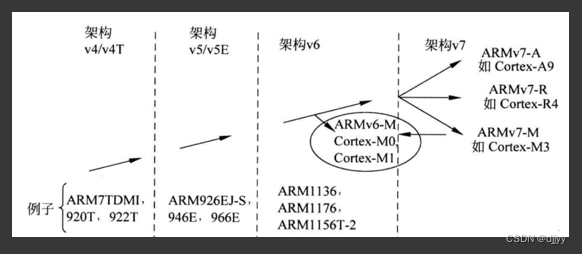
ARM体系结构发展
目前ARM体系架构共定义了8个版本V1-V8
V1-V3 最早的版本,目前已废弃
V4-V6 经典处理器中运用的比较多
V7 目前Cortex系列处理器主要是这种架构、支持Thumb-2的32位指令集
V8 兼容ARMv7架构的特性,并支持64位数据处理
4、ARM指令集
指令集的概念
处理器能够识别并执行的指令集合;
每一条指令可处理一个简单或复杂操作(加、加乘…);
每一条指令对应一条或几条汇编指令。
指令集常见分类
复杂指令集(CISC):包含处理复杂操作的特定指令,指令长度不固定,执行需要多个周期。
精简指令集(RISC):指令简单而有效,格式和长度通常是固定的,大多数指令在一个周期内可以执行完毕,
ARM的内核是基于RISC体系结构的
5、SOC的概念
SOC(片上系统)
指的是在单个芯片上集成一个完整的计算机系统,所谓完整的系统一般包括中央处理器(CPU)、存储器、以及外围电路等。

二、Cortex-M0概述
1、Cortex-M0处理器简介
Cortex-M 系列产品主要包括 Cortex-M0、Cortex-M1、Cortex-M3、Cortex-M4、Cortex-M7 等,其中 Cortex-M0 主打低功耗和混合信号的处理,M3 主要用来替代 ARM7,重点侧重能耗与性能的平衡,而 M7 则重点放在高性能控制运算领域。

注:我们课程中使用的STM32F051微控制器内核就是ARM Cortex-M0、因此我们首先学习一下M0内核的知识
2、Cortex-M0体系结构
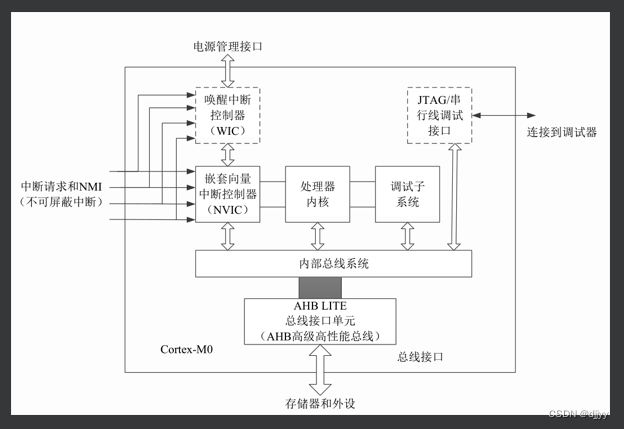
Cortex-M0结构框图
Cortex-M0 微处理器主要包括处理器内核、嵌套向量中断控制器(NVIC)、调试子系统、内部总线系统构成。Cortex-M0 微处理器通过精简的高性能总线(AHB-LITE)与外部进行通信。
Cortex-M0特性
Thumb 指令集,高效、高代码密度;
高性能,使用ARMv6-M的体系架构;
中断数量可配置(1~32 个),4 级中断优先级,低中断切换时延,提供不可屏蔽中断(NMI)输入保障高可靠性系统;
门电路少,低功耗,处理器可在休眠状态下掉电以降低功耗,还可被 WIC 唤醒;
与 Cortex-M1 处理器兼容,向上兼容 Cortex-M3 和 Cortex-M4 处理器,可以很容易地升级到 Cortex-M3。Cortex-M3 和 Cortex-M4 移植到 Cortex-M0 也非常简单。
支持多种嵌入式操作系统,也被多种开发组件支持,包括 MDK(ARM Keil 微控制器开发套件)、RVDS(ARM RealView 开发组件)、IAR C 编译器等。
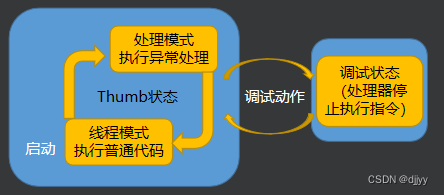
Cortex-M0工作模式
Cortex-M0有两种工作模式和两种工作状态
线程模式(Thread Mode):
芯片复位后,即进入线程模式,执行用户程序;
处理模式(Handler Mode):
当处理器发生了异常或者中断,则进入处理模式进行处理、处理完成后返回线程模式。
Thumb状态:正常运行时处理器的状态
调试状态:调试程序时处理器的状态
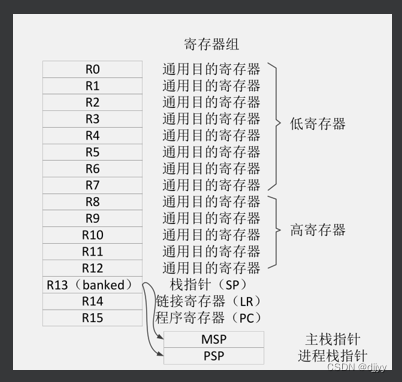
Cortex-M0寄存器组——通用寄存器
Cortex-M0 处理器内核有 13 个通用寄存器以及多个特殊寄存器,如图 所示。具体介绍如下:
R0-R12:通用寄存器。其中 R0-R7 为低端寄存器,可作为 16 位或 32 位指令操作数,R8-R12 为高端寄存器,只能用作 32 位操作数
R13:堆栈指针 SP,Cortex-M0 在不同物理位置上存在两个栈指针,主栈指针 MSP,进程栈指针 PSP。在处理模式下,只能使用主堆栈,在线程模式下,可以使用主堆栈也可以使用进程堆栈,这主要是由 CONTROL 寄存器控制完成。 系统上电的默认栈指针是MSP
R14:连接寄存器(LR),用于存储子程序或者函数调用的返回地址
R15:程序计数器(PC),存储下一条将要执行的指令的地址。
Cortex-M0寄存器组——特殊寄存器
xPSR:组合程序状态寄存器,该寄存器由三个程序状态寄存器组成
应用PSR(APSR): 包含前一条指令执行后的条件标志
中断PSR(IPSR): 包含当前ISR的异常编号
执行PSR(EPSR) : 包含Thumb状态位

PRIMSK:中断屏蔽特殊寄存器。
CONTROL:控制寄存器
控制处理器处于线程模式是,使用哪个堆栈=0时,使用MSP,=1时,使用PSP
处理器模式时,固定使用MSP

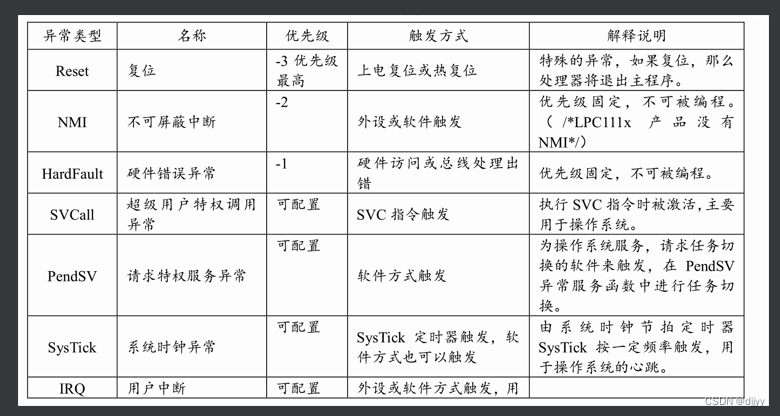
3、Cortex-M0异常和中断
Cortex-M0 处理器最多支持 32 个外部中断(通常称为 IRQ)和一个不可屏蔽中断(NMI), 另外 Cortex-M0 还支持许多系统异常(Reset、HardFault、SVCall、PendSV、SysTick),它们主要用于操作系统和错误处理,参见下表

4、Cortex-M0指令集
ARM 处理器支持两种指令集:ARM 和 Thumb。
EPSR 寄存器的 T 标志位负责指令集的切换,Cortex-M0只支持Thumb指令。
ARM指令集
32位精简指令集;
指令长度固定;
降低编码数量产生的耗费,减轻解码和流水线的负担;
Thumb指令集
Thumb指令集是ARM指令集的一个子集;
指令宽度16位;
与32位指令集相比,大大节省了系统的存储空间;
Thumb指令集不完整,所以必须配合ARM指令集一同使用。
注:Thumb 与 ARM 相比,代码体积小了 30%,但性能也低了 20%。2003 年,ARM 公司引入了 Thumb-2 技术,具备了一些 32 位的 Thumb 指令,使得原来很多只有 ARM 指令能够完成的功能,用 Thumb 指令也可以完成了。Cortex-M0 基于的 ARMv6-M 体系结构,该体系结构的处理器只是用了16位Thumb指令和部分32位Thumb指令
三、认识STM32
1、STM32产品的介绍

2、STM32产品命名规范
以STM32F051K8U6为例:

3、STM32F0体系架构

系统主要由以下几个模块组成 :
● 二个主模块 :
– Cortex-M0 内核及先进高性能总线 (AHB bus)
– 通用 DMA ( GP-DMA -- general-purpose DMA)
● 四个从模块 :
– 内部 FLASH
– 内部SRAM
– 专门用于连接 GPIO 口的 AHB2
– AHB 到 APB 的桥 , 所有的外设都挂在 APB 总线上
四、STM32F0硬件平台介绍