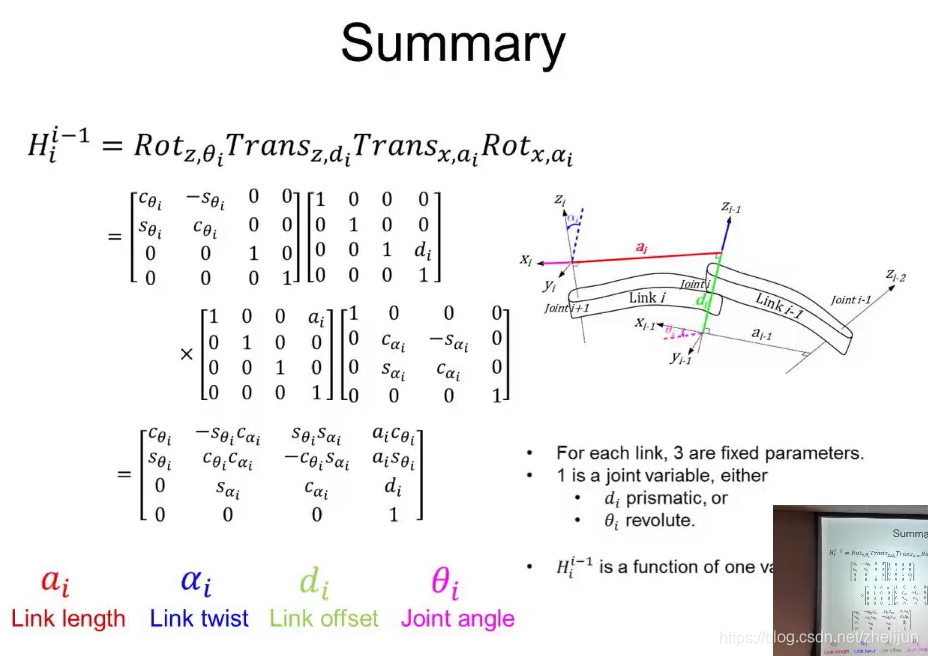
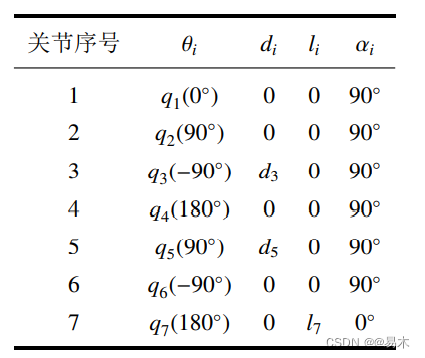
人体上肢手臂DH参数表:
利用Matlab Rotobics Toolbox 进行建模和可视化:
L1 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L3 = Link('d', 0.3, 'a', 0, 'alpha', pi/2);
L4 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L5 = Link('d', 0.4, 'a', 0, 'alpha', pi/2);
L6 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L7 = Link('d', 0, 'a', 0.2, 'alpha', 0);
robot=SerialLink([L1,L2,L3,L4,L5,L6, L7], 'name', 'human arm'); %SerialLink 类函数
robot.display()
robot.plot([0, pi/2,-pi/2,pi,pi/2,-pi/2,pi]);

人体上肢有七个自由度,其中肩关节3个,肘关节2个,腕关节2两个
关节的顺序如下如所示: