内容包括Mplab IDE与Mplab X IDE的使用,触摸功能实践,PIC单片机C与汇编混合编程,PIC单片机介绍等。紫色文字是超链接,点击自动跳转至相关博文。持续更新,原创不易!
目录:
一、Mplab IDE的使用
1、Mplab IDE建立工程
1)简述
2)建立工程
3)调试
(1)源程序编译 (2)模拟仿真设置 (3)端口设置 (4)添加变量到Watch
(5)查看ROM、RAM使用情况 (6)查看软仿真时间
2、Mplab IDE硬件仿真
1)简述 2)接入PICkit3出现Target Device ID (00000000) does not match expected Device ID (00002460)
3)首次使用PICkit3出现PK3Err0040 4)接入PICkit3烧录时要设置电源 5)Maplab的输出窗口看不见
二、Mplab X IDE的使用
1、简述
2、PICkit3驱动安装
3、XC8编译器
1)microchip官网下载编译器 2)编译器的修改
4、项目的建立
5、代码配置MCC
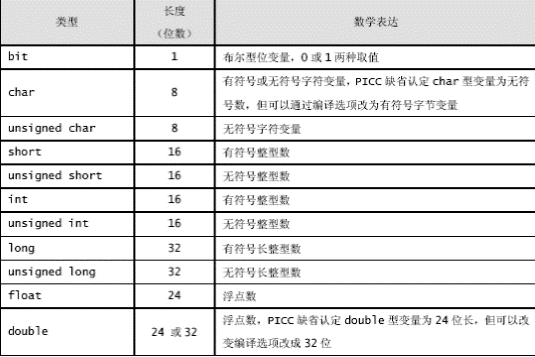
三、实践(PIC单片机-PICC介绍)
1、端口控制
2、实现触摸功能
3、使用PIC公司的触摸库
4、触摸IC芯片
四、C与汇编混合编程
五、PIC单片机介绍
1、电源管脚分布
2、中文资料
----------------------------------------------------------------------------------------------------------------
一、Mplab IDE的使用
1、Mplab IDE建立工程
1)简述
当前Maplab IDE与Hi-Tech均安装在D盘,软件搜索我的百度网盘
------------------------------
2)建立工程
通过工程向导是最为简洁的方法,如下图所示。
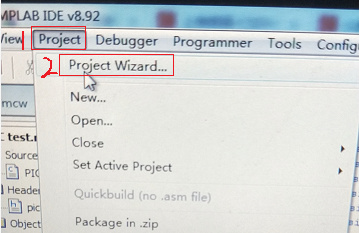
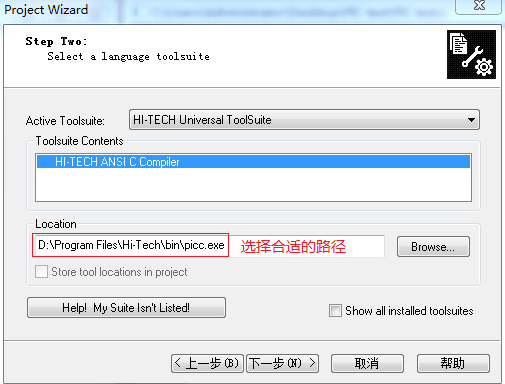
下面按提示做就行了。
------------------------------
3)调试
(1)源程序编译

----------------
(2)模拟仿真设置
注:软仿真前可设置断点

Debuggen/Setting…下面
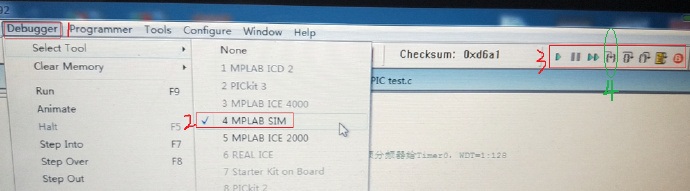
接上图4处单步执行程序,状态如下。
----------------
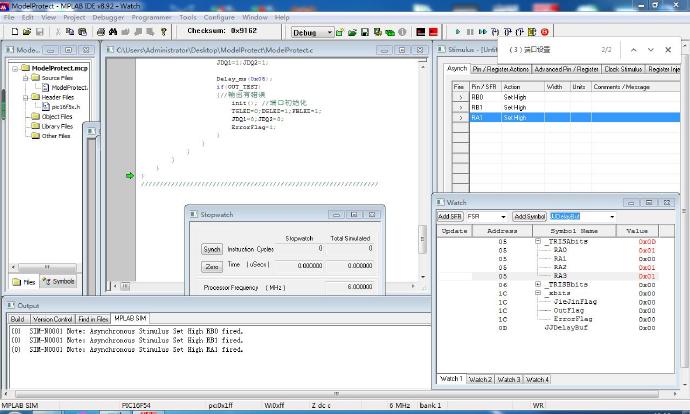
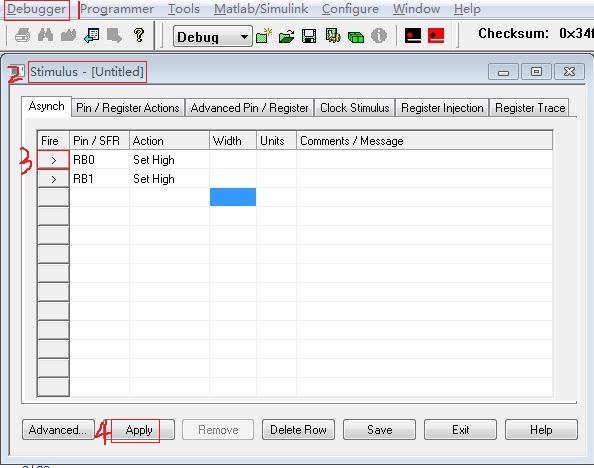
(3)端口设置
Debugger-Stimulus,选择Asynch,增加PIN。比如PB0、PB1,在Action选择Hign或Low,务必点3处Fire才能生效。
----------------
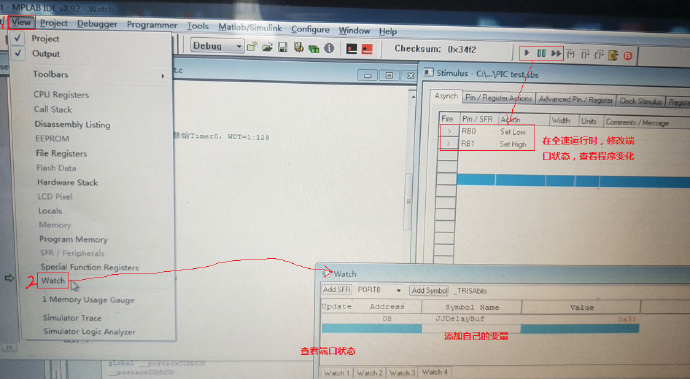
(4)添加变量到Watch
通过端口的变化查看相关变量,变量必须要在程序中使用,才能添加到Watch。
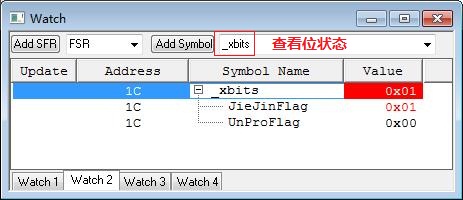
查看位变量的状态:
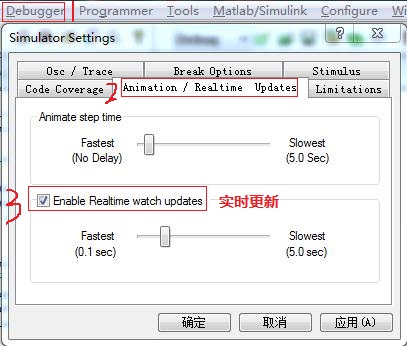
Watch中的内容不能实时更新:
----------------
(5)查看ROM、RAM使用情况
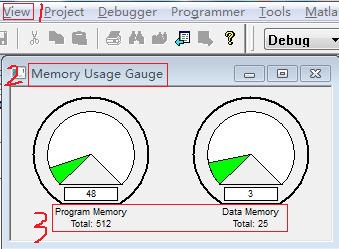
View/Memory Usage Gauge
PIC单片机RAM的位定义:
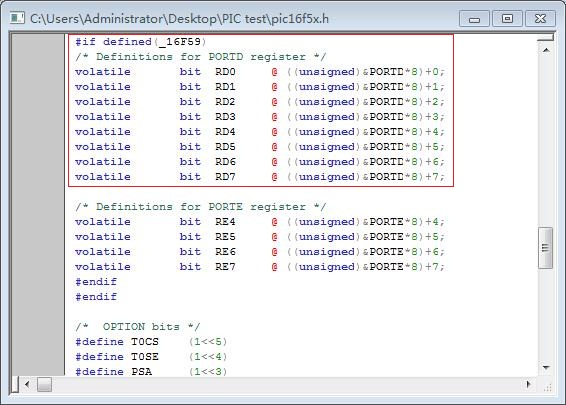
通过其头文件,仿写。
u8 x @ 0x1C;
bit JieJinFlag @ ((unsigned)&x*8)+0;
bit UnProFlag @ ((unsigned)&x*8)+1;
bit current @ ((unsigned)&x*8)+2;
//bit JieJinFlag=0;
//bit UnProFlag;
----------------
(6)查看软仿真时间
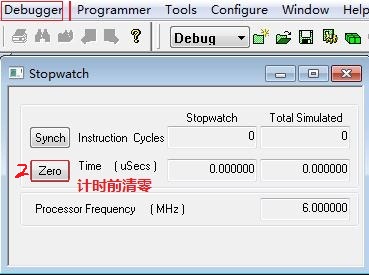
Debuggen/Stopwatch
-----------------------------------------------------------
2、Mplab IDE硬件仿真
1)简述
看到PIC单片机就感到亲切,今天开始对PIC16F1936编程仿真,仿真器PICkit3。

PIC18FXXXX:
------------------------------
2)接入PICkit3出现Target Device ID (00000000) does not match expected Device ID (00002460)
这是仿真头与线路板连接不正确。
------------------------------
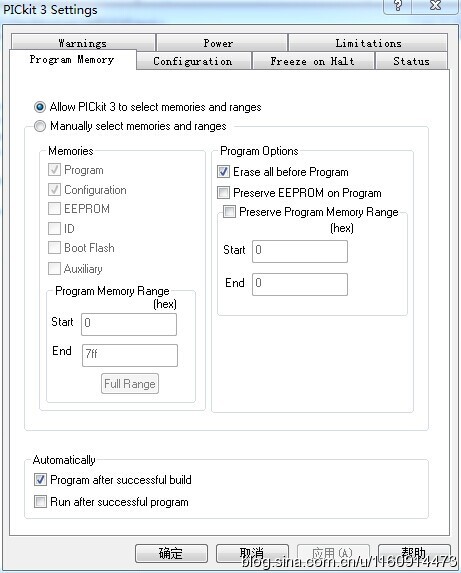
3)首次使用PICkit3出现PK3Err0040
PK3Err0040: The target device is not ready for debugging.Please check your configuration bit settings and program the device before proceeding.
解决办法:在这里勾 选:Debugger>Settings>Program Memory>Automatically 的 “Program after successful build”项即可在每次成功后自动下载代码到Flash并进入调试就绪模式。
------------------------------
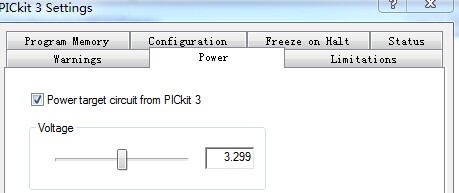
4)接入PICkit3烧录时要设置电源
PK3Err0045: You must connect to a target device to use PICkit3.
Programmer>Settings>Power中设置

------------------------------
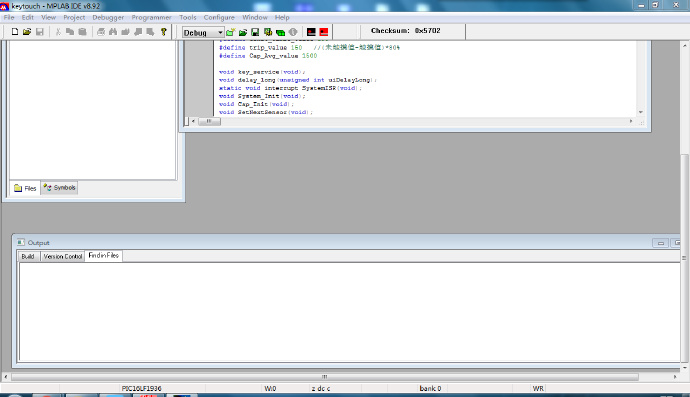
5)Maplab的输出窗口看不见
(1)在设置这个功能的时候,准备把output窗口移到下边缘,没想到移动过头,移动到电脑桌面的最下方(移到下方看不到的位置去了),然后output窗口就不见了,调不出来,在view里面勾选了output或者取消,编译文件,甚至重新启动电脑,output窗口都不出现了!
右击任务栏->解除锁定任务栏->拖动任务栏到右边就可以看到被隐藏的窗口了。
----------------
(2)隐藏在整个窗口的下方

右侧是有进度条的。
将output移上去,右侧就没有进度条了。

----------------------------------------------------------------------------------------------------------------
二、Mplab X IDE的使用
1、简述
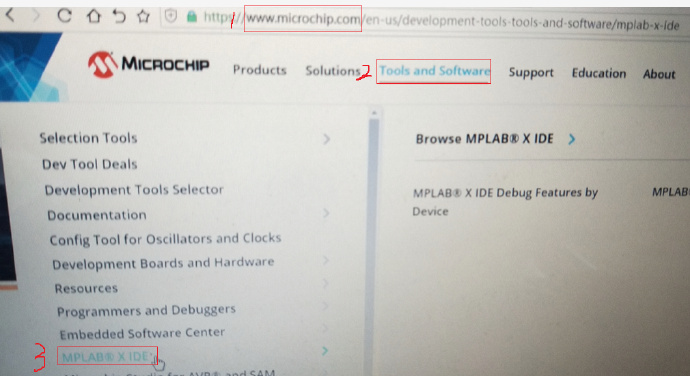
英文官网:www.microchip.com,找到“Tools and SoftWare”,如下图所示。

Microchihp工程师社区:http://microchip.com.cn/newcommunity/,可下载中文资料,论坛提问。

-----------------------------------------------------------
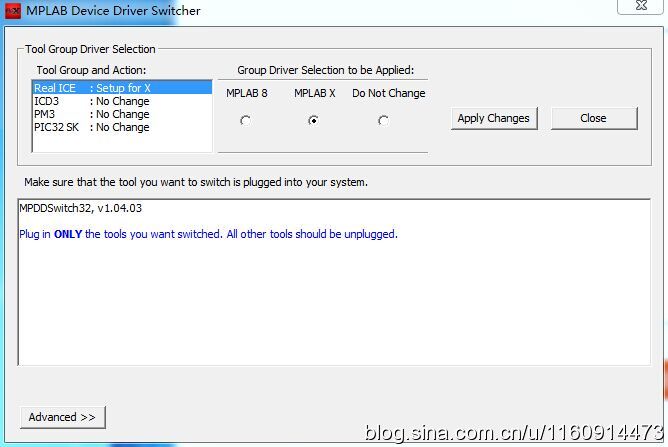
2、PICkit3驱动安装
接入PICkit3提示找不到工具,为驱动没有安装。打开如图1 MPLAB drive,如下图设置,点"Apply Changes"即可。
-----------------------------------------------------------
3、XC8编译器
1)microchip官网下载编译器
XC8支持所有8位单片机,XC16支持所有16位单片机。
-------------------------------
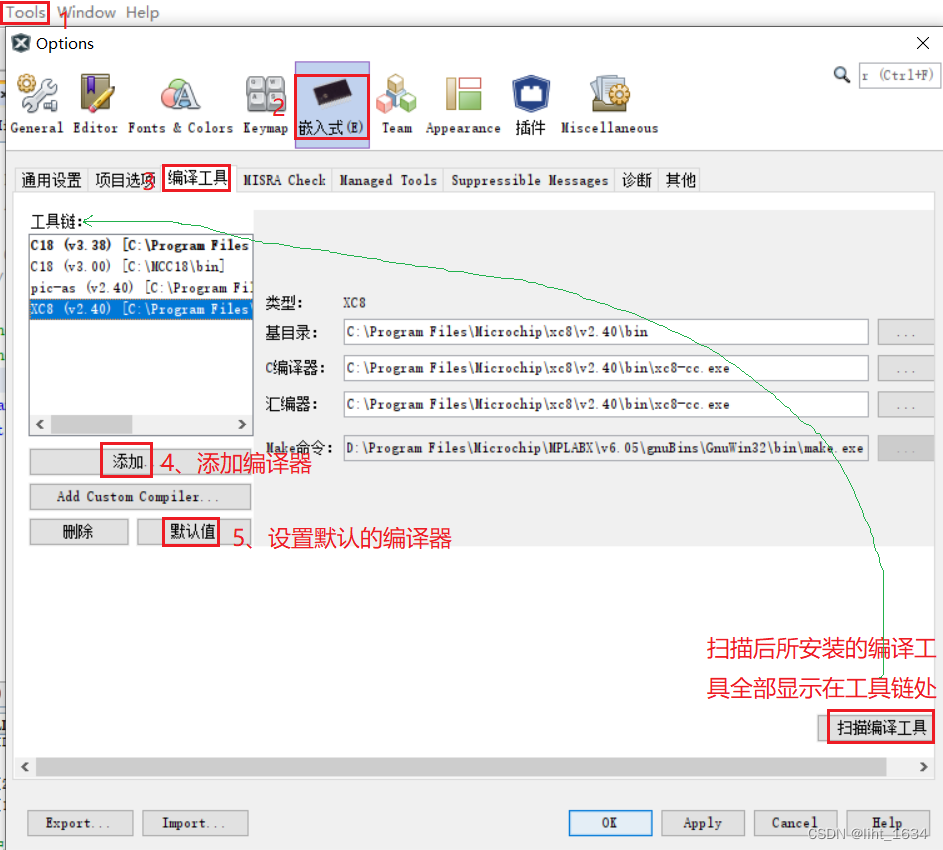
2)编译器的修改
-----------------------------------------------------------
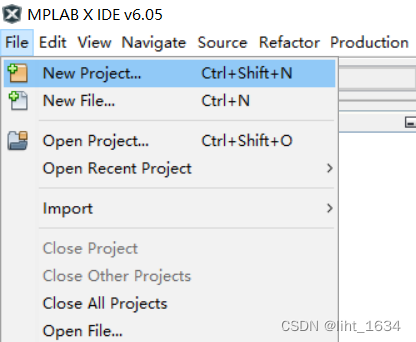
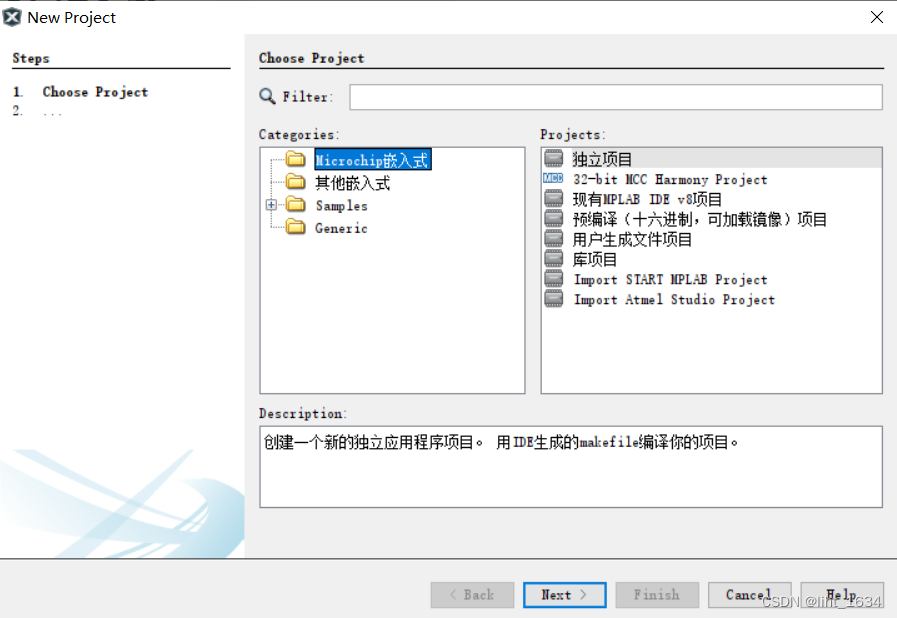
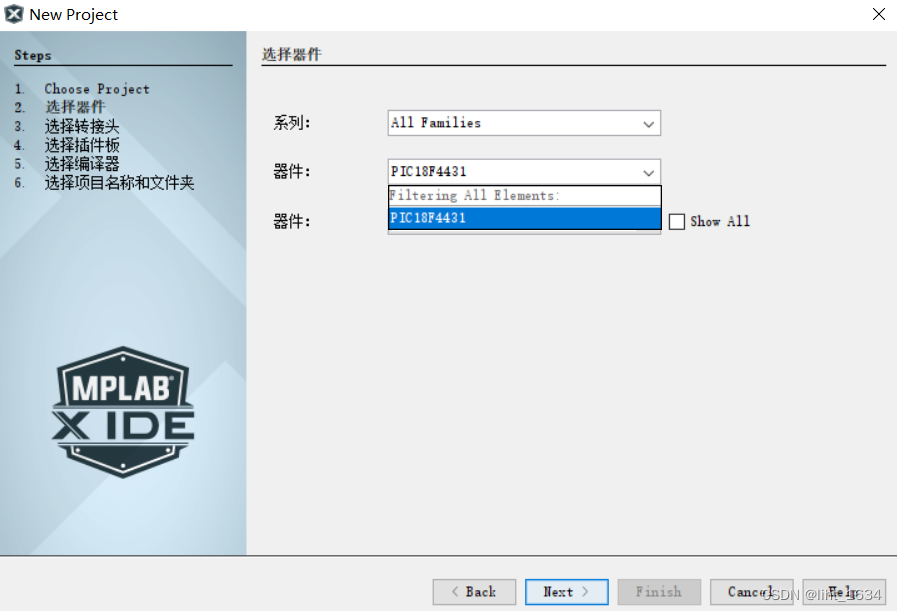
4、项目的建立

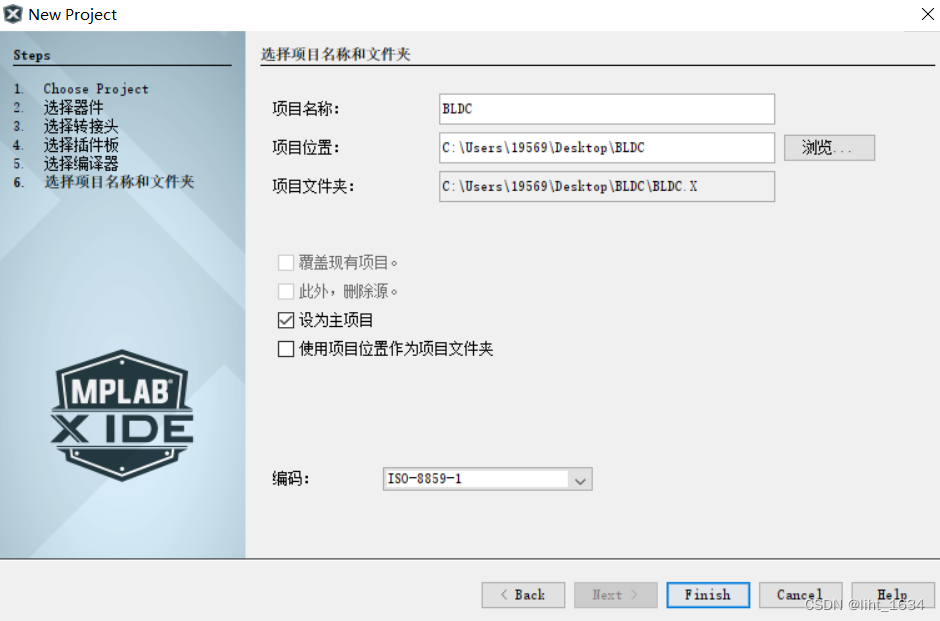
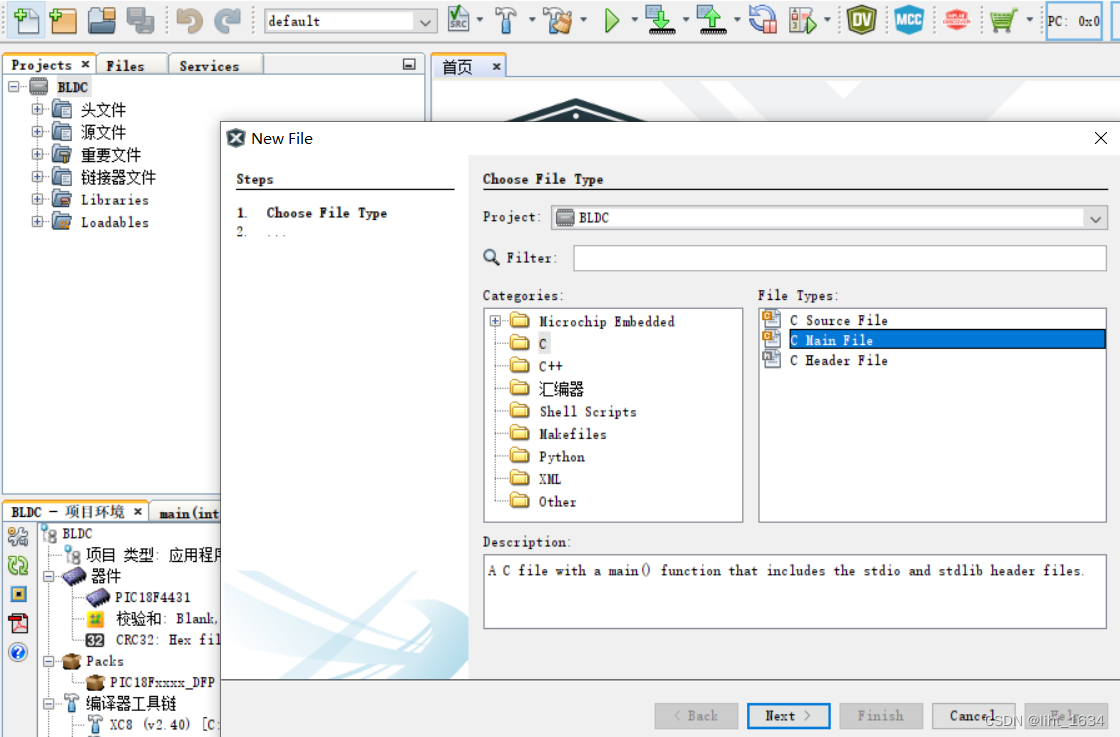
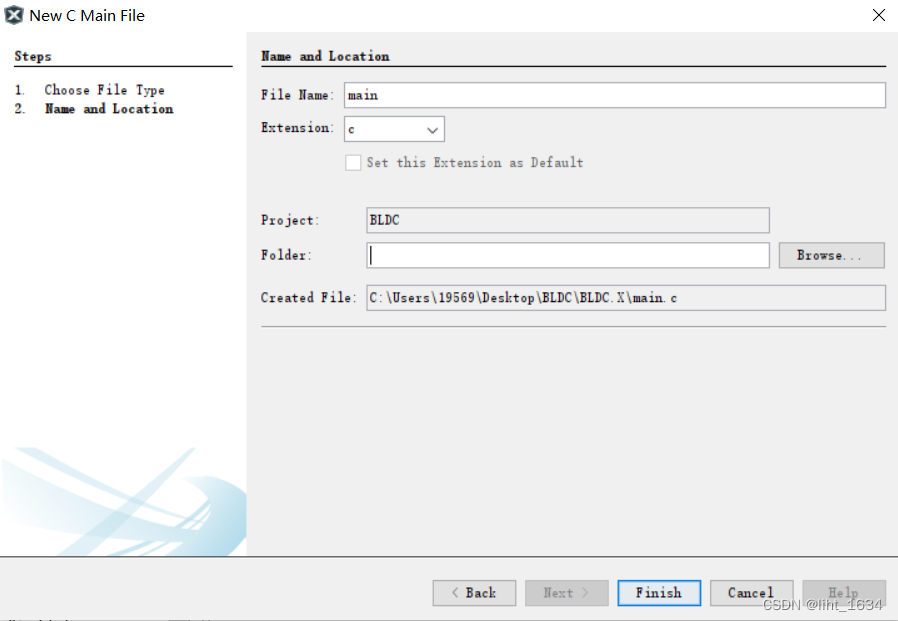
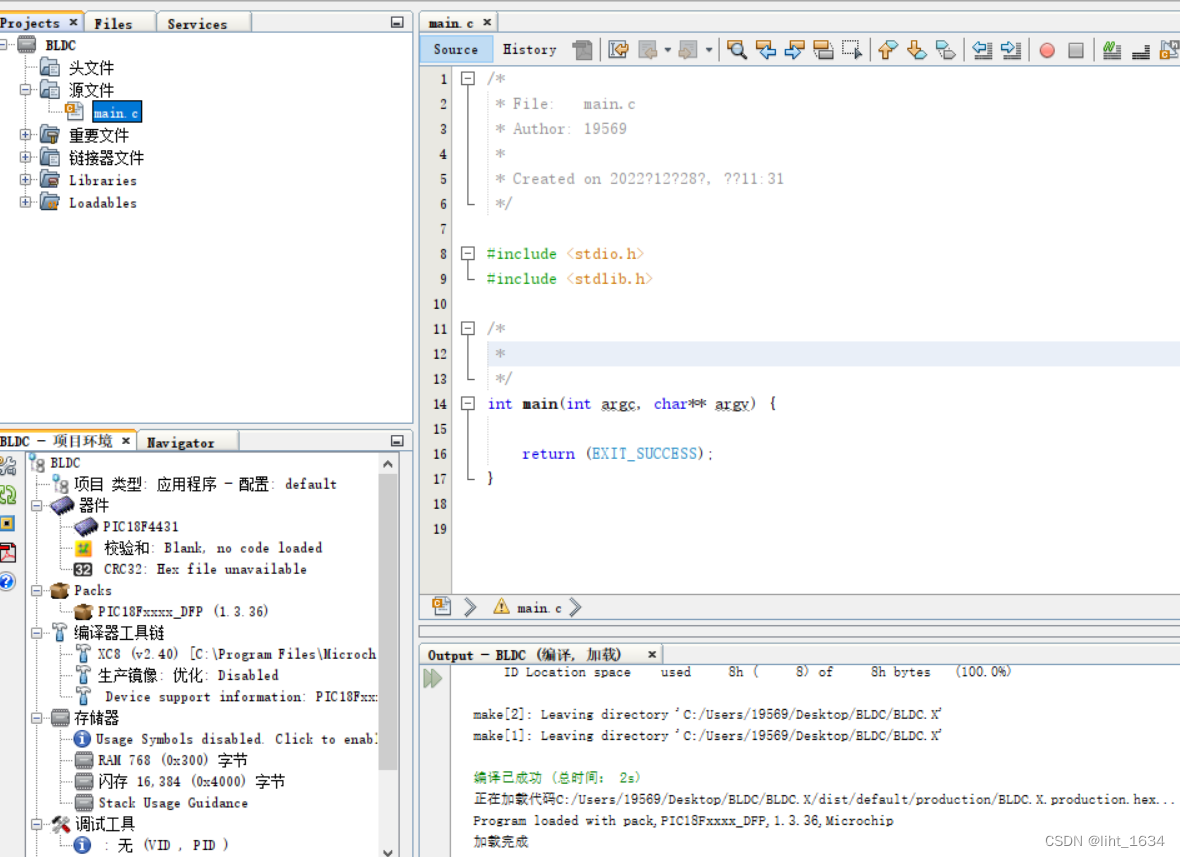
-----------------------------------------------------------
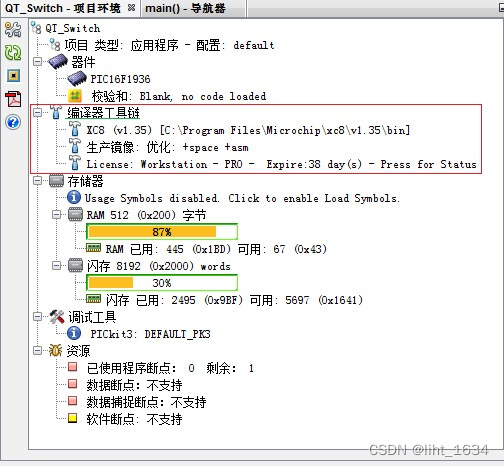
5、代码配置MCC
开发环境:MPLAB X: v6.05,MCC: 5.2.2
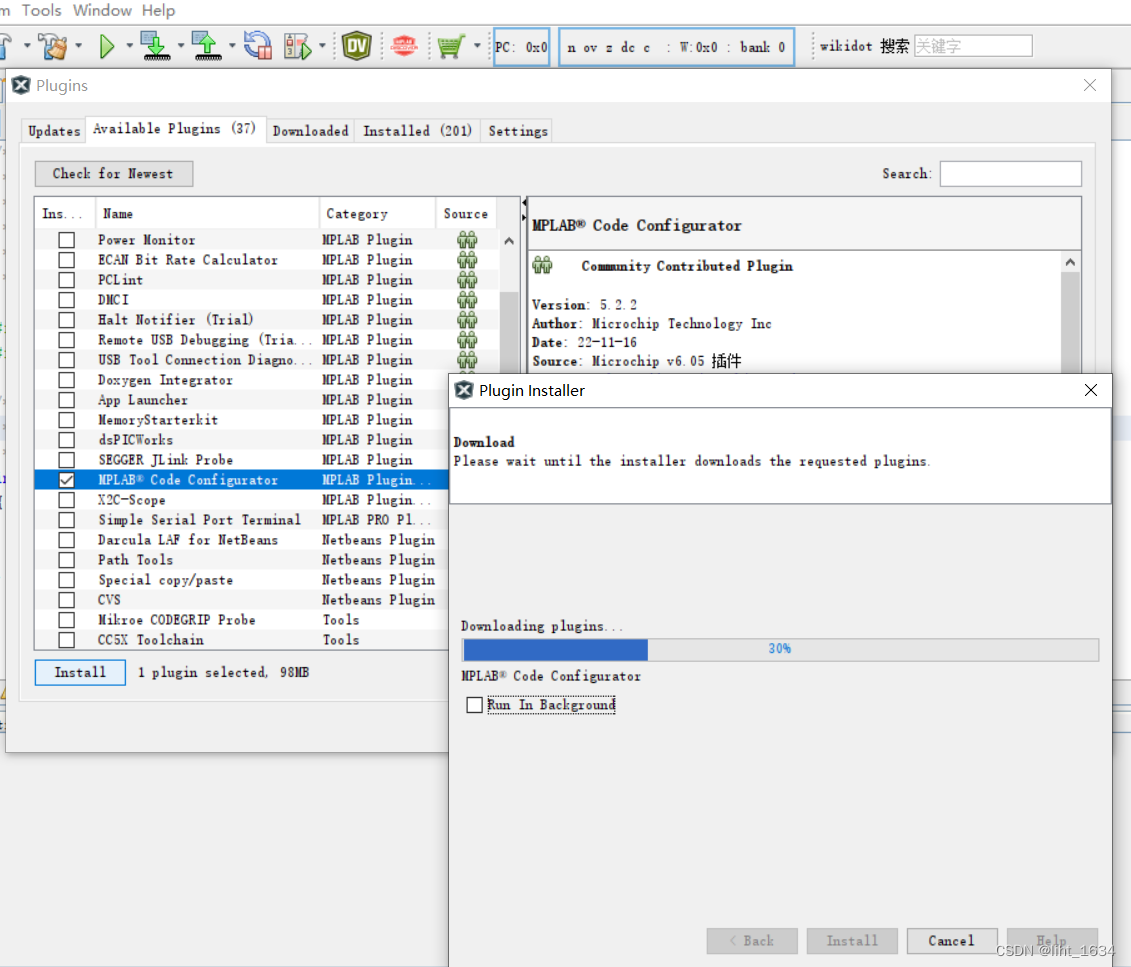
1)加载MCC
-------------------------------
2)载入MCC

出现上图红色警告,不用管它,继续等待,一两分钟后出现下图的界面。
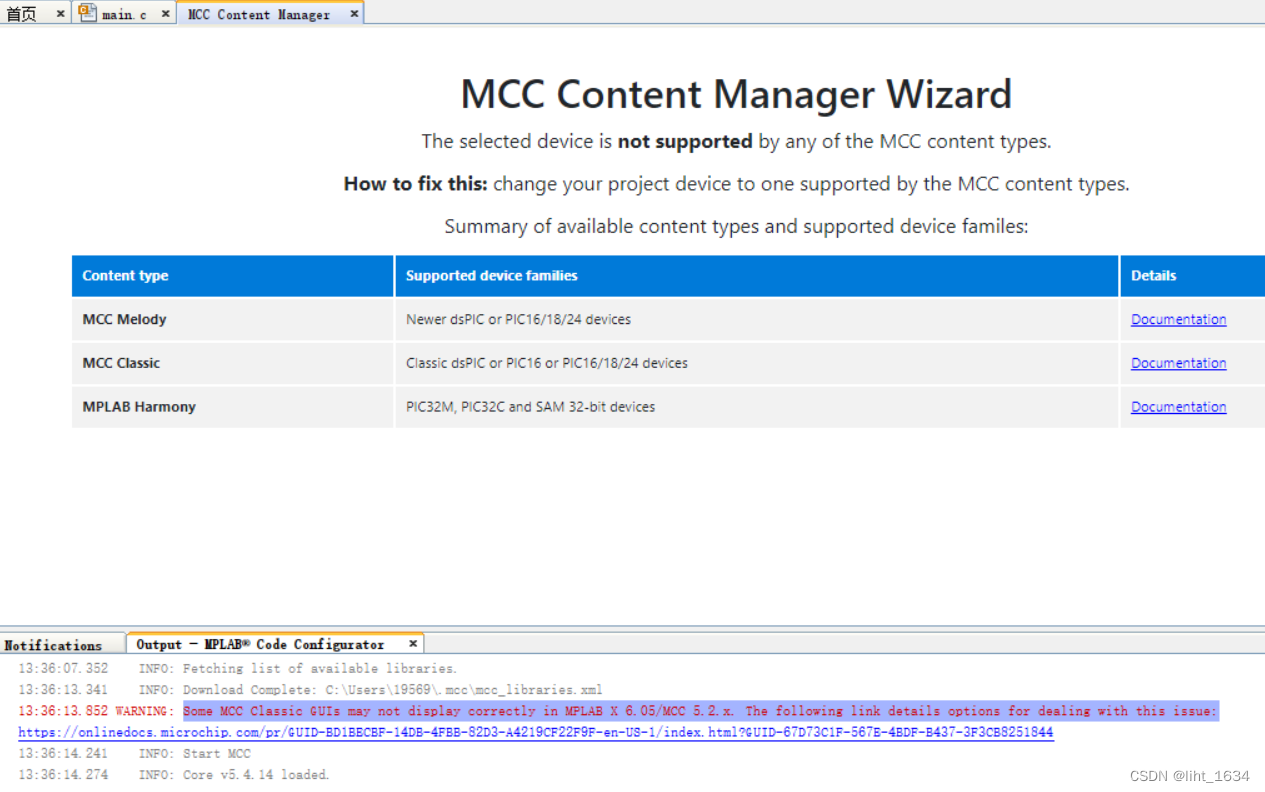
如上图,PIC18F4431不支持MCC。
----------------------------------------------------------------------------------------------------------------
三、实践(PIC单片机-PICC介绍)
1、端口控制
完成三件事:1、仿真部分全部正常;2、配置字设置无误;3、内部晶振正常,端口操作正常
#include "pic.h"
void delay_long(unsigned int uiDelayLong);
void main()
{
OSCCON = 0xeb; //禁止4X PLL,内部4MHz时钟源
TRISBbits.TRISB3 = 0; //设置RB5端口为输出
TRISCbits.TRISC4 = 0;
ANSELBbits.ANSB3 = 0; //RB5设置为数字端口
LATBbits.LATB3 = 0; //RB3输出低电平
LATCbits.LATC4 = 0;
WPUBbits.WPUB5 = 1;
while (1)
{
LATBbits.LATB3 = 1;
LATCbits.LATC4 = 0;
delay_long(100);
LATBbits.LATB3 = 0;
LATCbits.LATC4 = 1;
delay_long(100);
}
}
void delay_long(unsigned int uiDelayLong)
{
unsigned int i;
unsigned int j;
for(i=0;i<</font>uiDelayLong;i++) //
{
for(j=0;j<500;j++) //内嵌循环的空指令数量
{
;
}
}
}
/
-----------------------------------------------------------
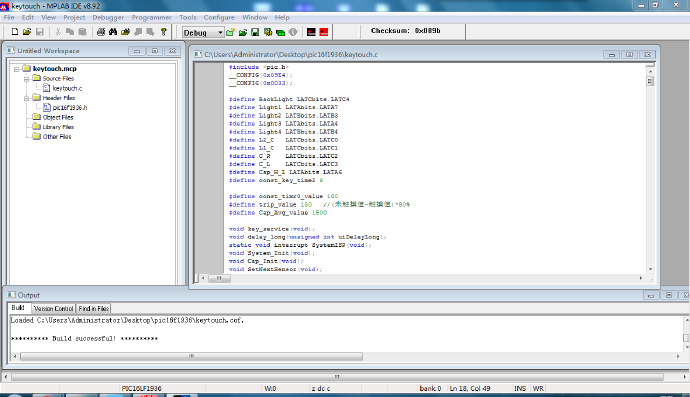
2、实现触摸功能
#include "pic.h"
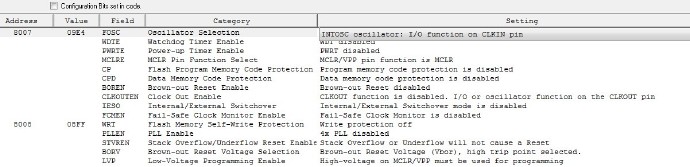
__CONFIG(0x09E4);
__CONFIG(0x0033);
#define BackLight LATCbits.LATC4
#define Light1 LATAbits.LATA7
#define Light2 LATBbits.LATB3
#define Light3 LATAbits.LATA4
#define Light4 LATBbits.LATB4
#define L2_C LATCbits.LATC0
#define L1_C LATCbits.LATC1
#define C_R LATCbits.LATC2
#define C_L LATCbits.LATC3
#define Cap_H_L LATAbits.LATA6
#define const_key_time2 8
#define const_timr0_value 100
#define trip_value 150 //(未触摸值-触摸值)*80%
#define Cap_Avg_value 1500
void key_service(void);
void delay_long(unsigned int uiDelayLong);
static void interrupt SystemISR(void);
void System_Init(void);
void Cap_Init(void);
void SetNextSensor(void);
void RestartTimers(void);
void Cap_ISR(void);
unsigned char Index = 1; // 触摸键通道计数
unsigned char AvgIndex = 0; //更新频率计数
unsigned int Cap_Value = 0; //当前按键频率值
const unsigned int trip[4]={trip_value,trip_value,trip_value,trip_value}; //频率差值
unsigned int Cap_Avg[4]={Cap_Avg_value,Cap_Avg_value,Cap_Avg_value,Cap_Avg_value}; //频率平均值
unsigned int uiKeyTimeCnt1=0;
unsigned int uiKeyTimeCnt2=0;
unsigned int uiKeyTimeCnt3=0;
unsigned int uiKeyTimeCnt4=0;
unsigned char ucKeyLock1=0;
unsigned char ucKeyLock2=0;
unsigned char ucKeyLock3=0;
unsigned char ucKeyLock4=0;
unsigned char ucKey1TouchCnt=0;
unsigned char ucKey2TouchCnt=0;
unsigned char ucKey3TouchCnt=0;
unsigned char ucKey4TouchCnt=0;
unsigned char ucKeySec=0;
void main()
{
System_Init();
delay_long(10);
Cap_Init();
GIE = 1;
while (1)
{
key_service();
}
}
void key_service(void)
{
switch(ucKeySec)
{
case 1:
{
}
break;
case 2:
{
if(ucKey2TouchCnt == 1)
{
Light2 = 0;
C_L = 1;
}else
{
Light2 = 1;
C_L = 0;
ucKey2TouchCnt = 0;
}
}
break;
case 3:
{
}
break;
case 4:
{
}
break;
default:
break;
}
}
void delay_long(unsigned int uiDelayLong)
{
unsigned int i,j;
for(i=0;i<</font>uiDelayLong;i++) //
{
for(j=0;j<500;j++)
{
asm("nop");
}
}
}
void System_Init(void)
{
OSCCON = 0b01101000; //内部4M晶振
OSCTUNE= 0b00000000; //晶振校准
TRISCbits.TRISC0 = 0;
TRISCbits.TRISC1 = 0;
TRISCbits.TRISC2 = 0;
TRISCbits.TRISC3 = 0;
L2_C = 0;
L1_C = 0;
C_R = 0;
C_L = 0;
TRISAbits.TRISA6 = 0;
LATAbits.LATA6 = 0;
TRISCbits.TRISC4 = 0; //BackLight输出
TRISAbits.TRISA7 = 0; //Light1输出
TRISBbits.TRISB3 = 0; //Light2输出
TRISAbits.TRISA4 = 0; //Light3输出
TRISBbits.TRISB4 = 0; //Light4输出
TRISBbits.TRISB1 = 1; //RB1触摸按键输入
ANSELBbits.ANSB1 = 1; //RB1设置为模拟端口
WPUB = 0x00; //PORTB口无上拉
IOCBP = 0x00; //关PORTB口电平变化中断
IOCBN = 0x00;
BackLight = 0; //背景灯打开
Light1 = 1; //其它灯关闭
Light2 = 1;
Light3 = 1;
Light4 = 1;
}
void Cap_Init(void)
{
CPSCON0 = 0b10001100; //打开电容模块,高频率振荡
CPSCON1 = 0b00000001; //设置扫描通道0-3
OPTION_REG = 0b11010011; //TMR0 分频器1:16
TMR0IF = 0;
TMR0IE = 1;
T1CON = 0b11000101; //计数,时钟来源电容模块1:1分频
T1GCON = 0b00000000; //与门控位无关
TMR1GIF = 0;
TMR1GIE = 0;
TMR1H = 0;
TMR1L = 0;
TMR0 = const_timr0_value;
}
void SetNextSensor(void)
{
if(Index == 3)
{
Index = 0; //Key1-Key4
}
else
{
Index++;
}
CPSCON1 = Index;
}
void RestartTimers(void)
{
TMR1ON = 0;
TMR1H = 0;
TMR1L = 0;
TMR1ON = 1;
}
void Cap_ISR(void) //触摸按键扫描
{
if (Cap_Value < (Cap_Avg[Index] - trip[Index])) //有键按下,不更新频率平均值
{
switch(Index)
{
case 0: //KEY1 ON
{
}
break;
case 1: //KEY2 ON
{
if(ucKeyLock2==0)
{
uiKeyTimeCnt2++; //累加定时中断次数
if(uiKeyTimeCnt2>const_key_time2)
{
uiKeyTimeCnt2 = 0;
ucKeyLock2 = 1; //自锁按键置位,避免一直触发
ucKeySec = 2; //触发2号键
ucKey2TouchCnt++;
}
}
}
break;
case 2: //KEY3 ON
{
}
break;
case 3: //KEY4 ON
{
}
break;
default:
break;
}
}
else if (Cap_Value > (Cap_Avg[Index] - trip[Index] +64)) //无键按下,慢更新频率平均值64
{
switch(Index)
{
case 0: //KEY1 OFF
{
}
break;
case 1: //KEY2 OFF
{
ucKeyLock2=0; //按键自锁标志清零
uiKeyTimeCnt2=0;//按键去抖动延时计数器清零
}
break;
case 2: //KEY3 OFF
{
}
break;
case 3: //KEY4 OFF
{
}
break;
default:
break;
}
if (AvgIndex < 4)
{
AvgIndex ++; //更新频率
}
else
{
AvgIndex = 0;
}
if (AvgIndex == 4)
{
if(Cap_Value >= Cap_Avg[Index])
{
Cap_Avg[Index] = Cap_Avg[Index]+(Cap_Value - Cap_Avg[Index])/16;
}
else
{
Cap_Avg[Index] = Cap_Avg[Index]-(Cap_Avg[Index] - Cap_Value)/16;
}
}
}
}
static void interrupt SystemISR(void) //Timer0中断2.5ms
{
if(TMR0IE && TMR0IF)
{
TMR0IF = 0;
TMR0 = const_timr0_value;
TMR1ON = 0; //停止触摸按键振荡频率计数
Cap_Value = (unsigned int)(TMR1H <<8) + TMR1L; //读取振荡频率
Cap_ISR();
//SetNextSensor(); //设置通道
RestartTimers(); //重启TMR1
}
if (TMR0IE && TMR0IF)
{
TMR0IF = 0;
RestartTimers();
}
}
-----------------------------------------------------------
3、 使用PIC公司触摸库
采用PIC公司提供的库,到Microchip Libraries for Applications (MLA) | Microchip Technology下载,另外要注意MPLAB_IDE_8_76版本IDE,C编译器用picc-9_81-win.exe。
这就是PIC公司的触摸库,装好后得到的是一系列触摸MCU的demo,找到我们要的库(含有PIC16F1827),然后把它拷贝出来,进行配置和改造。Configure-->Select Device选择PIC16F1827,整个程序默认的速度是片内晶振16M,可搜索我的百度云盘“PIC16F1937_8 button”。
配置generic_processorConfigBits.h,实现对用内部晶振等等。

还需要修改的地方:mTouch_config.h中修改两个地方:
这个是修改通道。
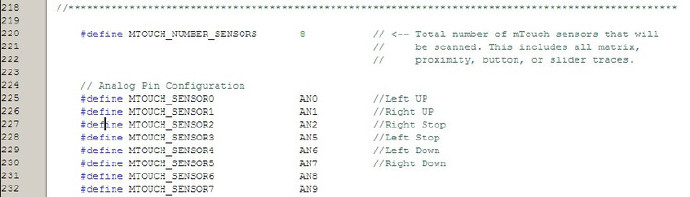
修改触摸灵敏度,值越小灵敏度越大。

在主函数main.c中读出触摸值,这里的CAP_DATA值大概是1或2。 使用PIC公司的触摸库做触摸处理,得到的效果非常好。
---------------------------------------------------
4、触摸IC芯片
----------------------------------------------------------------------------------------------------------------
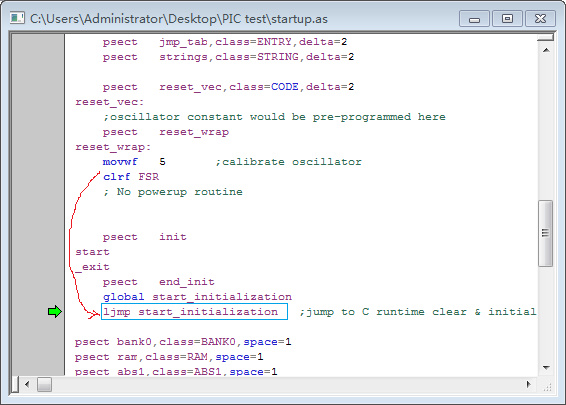
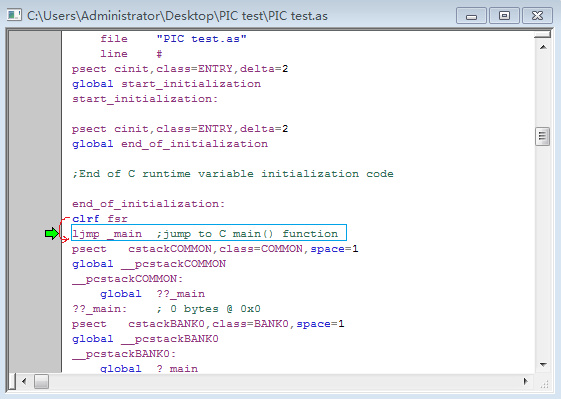
四、C与汇编混合编程
#include "pic.h"
unsigned char add_function(unsigned char augend,unsigned char addend);
volatile unsigned char tmp; //定义位于bank0 的字符型全局变量
void main(void)
{
unsigned char temp1,temp2,temp3;
temp3=add_function(2,3);
asm("clrwdt"); //清看门狗
OSCCON = 0xEB; //禁止4X PLL,内部4MHz时钟源
TRISBbits.TRISB3 = 0; //设置RB5端口为输出
TRISCbits.TRISC4 = 0;
ANSELBbits.ANSB3 = 0; //RB5设置为数字端口
LATBbits.LATB3 = 0; //RB3输出低电平
LATCbits.LATC4 = 0;
WPUBbits.WPUB5 = 1;
_asm
CLRF _STATUS //选择bank0
MOVLW 0x10 //设定初值
MOVWF _tmp //tmp=0x10
_endasm
if (tmp==0x10)
{
_nop();
}
}
unsigned char add_function(unsigned char augend,unsigned char addend)
{
return(augend+addend);
}
----------------------------------------------------------------------------------------------------------------
五、PIC单片机介绍
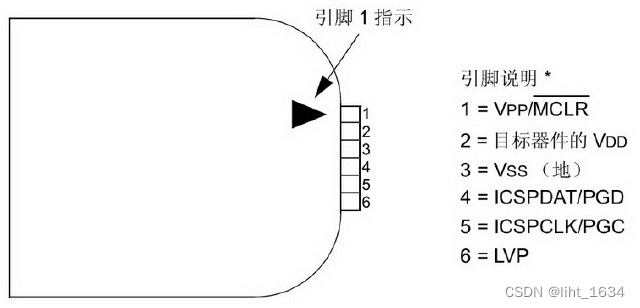
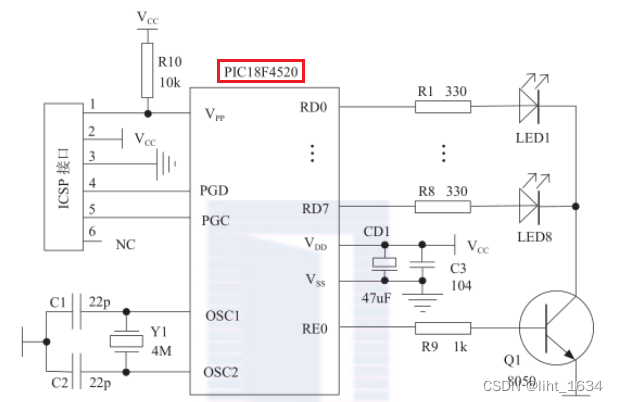
1、电源管脚分布
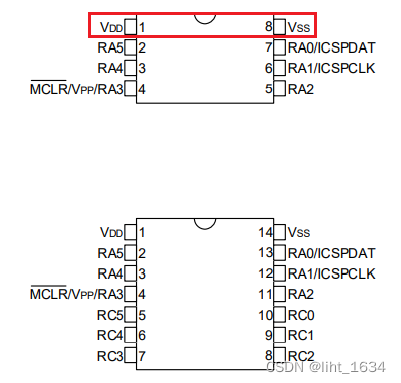
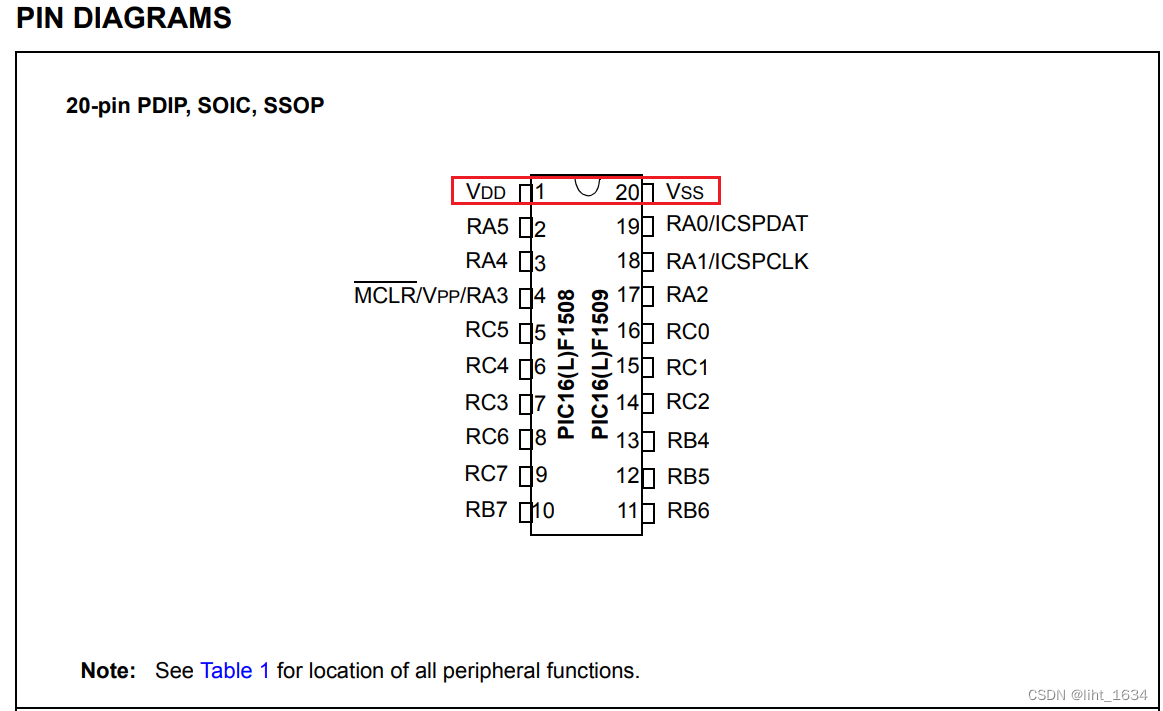
电源管脚分布规律:VDD PIN1,其对面的脚位GND。擦除丝印的单片机可根据此规律判断是否为PIC单片机。
---------------------------------------------------------------------------------------------------------------