功能介绍
- 图片打开和保存
- 图片矫正(证件扫描、文字纠正…)
- 图片锐化增强
- 图片清空
- 阈值设置
项目实现
基本思路(证件扫描)
- 抠图:提取轮廓
- 矫正:透视变换
- 锐化增强:二值化
算法设计(证件扫描)
第一步:提取边缘
- 读取图像,转化为灰度图
- 降噪,二值化 高斯滤波
GaussianBlur() - 适当膨胀,提高检测效率
- 边缘检测
Canny(),打印出二值图验证
第二步:轮廓查找与筛选
- 轮廓检测
findContours() - 霍夫直线检测
HoughLines() - 绘制检测到的直线并验证
line() - 排除距离过近、不相交的直线
- 排除距离过近的两直线交点
第三步:透视变换
- 由第二步筛选出的四个顶点得出一组坐标
- 确定输出图像长宽(或自适应),验证
- 计算透视变换矩阵
GetPerspectiveTransform() - 透视变换函数
warpPerspective()
第四步:锐化增强
- 必要的二值化
adaptiveThreshold() - …
- 输出图像
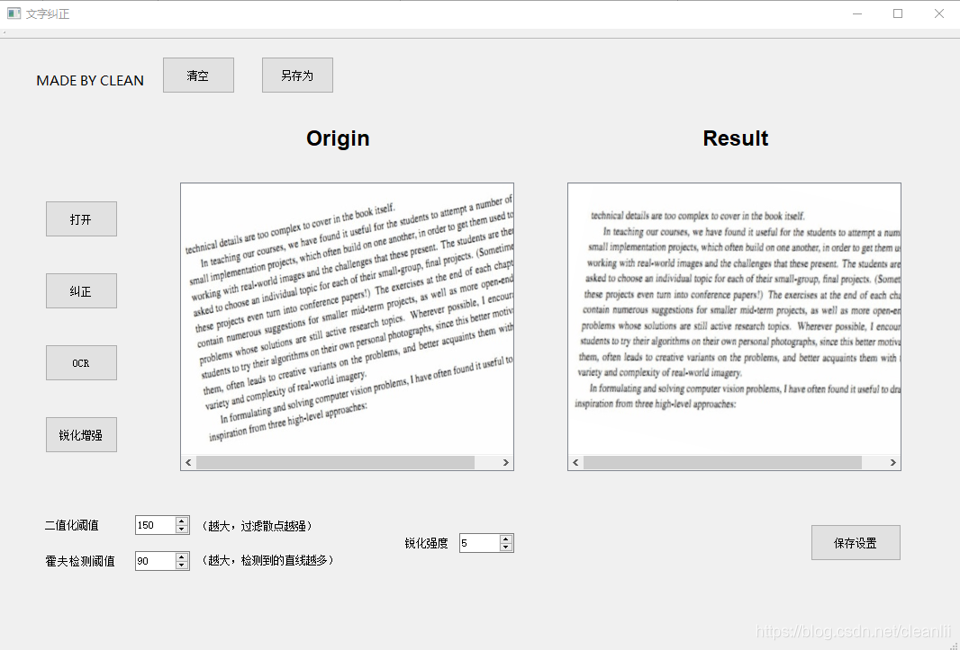
UI设计
核心代码
- 证件扫描
Mat scanning()
{Mat src = imread(path);Mat source = src.clone();Mat bkup = src.clone();Mat img = src.clone();//二值化threshold(img, img, GRAY_THRESH, 255, CV_THRESH_BINARY); //高斯滤波GaussianBlur(img, img, Size(5, 5), 0, 0); //获取自定义核Mat element = getStructuringElement(MORPH_RECT, Size(3, 3)); //适当膨胀dilate(img, img, element);//边缘提取Canny(img, img, 30, 120, 3);vector<vector<Point> > contours;vector<vector<Point> > f_contours;vector<Point> approx2;//轮廓检测findContours(img, f_contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);//求出面积最大的轮廓int max_area = 0;int index;for (int i = 0; i < f_contours.size(); i ){double tmparea = fabs(contourArea(f_contours[i])); if (tmparea > max_area){index = i;max_area = tmparea;}}//找顶点Mat f_img = img.clone();vector<Vec4i> lines;vector<Point2f> corners;//验证轮廓drawContours(f_img, contours, 0, Scalar(255)); lines.clear();corners.clear();//这里的阈值提供给用户修改//直线检测HoughLinesP(f_img, lines, 1, PI / 180, HOUGH_VOTE, 30, 10);//1.过滤不符条件的直线//2.计算直线交点//3.过滤不符条件的点DstSize(corners); //计算输出尺寸Mat dst = Mat::zeros(dst_hight, dst_width, CV_8UC3);vector<Point2f> f_points; //四边形顶点坐标组f_points.push_back(Point2f(0, 0));f_points.push_back(Point2f(dst.cols, 0));f_points.push_back(Point2f(dst.cols, dst.rows));f_points.push_back(Point2f(0, dst.rows));Mat temp = getPerspectiveTransform(corners, f_points); //计算透视变换矩阵 warpPerspective(source, dst, temp, dst.size()); //透视变换//这里也可以提供给用户修改//自动增强Mat local, gray;cvtColor(dst, gray, CV_RGB2GRAY);int blockSize = 25;int constValue = 10;//自适应二值化adaptiveThreshold(gray, local, 255, CV_ADAPTIVE_THRESH_MEAN_C, CV_THRESH_BINARY, blockSize, constValue); return local;
}
- 文字纠正
Mat rotate(Mat srcImage)
{//转换为灰度图Mat grayImage;cvtColor(srcImage, grayImage, CV_RGB2GRAY);//获取图片原尺寸const int nRows = grayImage.rows;const int nCols = grayImage.cols;//图片尺寸转换,获取傅里叶变换尺寸//返回DFT最优尺寸大小的函数int mRows = getOptimalDFTSize(nRows);int mCols = getOptimalDFTSize(nCols);Mat newImage;//边界扩充函数copyMakeBorder(grayImage, newImage, 0, mRows - nRows, 0, mCols - nCols, BORDER_CONSTANT, Scalar::all(0));//图像DFT变换//通道组建立,使用Mat_容器,一个存实部,一个存虚部Mat groupImage[] = { Mat_<float>(newImage), Mat::zeros(newImage.size(), CV_32F) };Mat mergeImage;//合并通道merge(groupImage, 2, mergeImage);//离散傅里叶变换即DFTdft(mergeImage, mergeImage);//分离通道 split(mergeImage, groupImage);//调整数据//计算傅里叶变化各频率的幅值magnitude(groupImage[0], groupImage[1], groupImage[0]);Mat magImage = groupImage[0];//归一化操作,幅值加1magImage = Scalar::all(1);//取对数log(magImage, magImage);//重新分配象限,使(0,0)移动到图像中心,即把低频部分移动到中心 //傅里叶变换之前要对源图像乘以(-1)^(x y),进行中心化 int cx = magImage.cols / 2;int cy = magImage.rows / 2;Mat temp;//左上象限Mat LT(magImage, Rect(0, 0, cx, cy));//右上象限Mat RT(magImage, Rect(cx, 0, cx, cy));//左下象限Mat LB(magImage, Rect(0, cy, cx, cy));//右下象限Mat RB(magImage, Rect(cx, cy, cx, cy));//交换象限,左上换右下LT.copyTo(temp);RB.copyTo(LT);temp.copyTo(RB);//交换象限,右上换左下 RT.copyTo(temp);LB.copyTo(RT);temp.copyTo(LB);//归一化//在0-1之间是统计概率分布,为了后续操作方便normalize(magImage, magImage, 0, 1, CV_MINMAX);//像素强度变换,输出单通道灰度图Mat magImg;magImage.convertTo(magImg, CV_8UC1, 255, 0);//imshow("magnitude", magImg);//检测直线//二值化threshold(magImg, magImg, GRAY_THRESH, 255, CV_THRESH_BINARY);//构造8UC1格式图像vector<Vec2f> lines;Mat houghImg(magImg.size(), CV_8UC3);//Houge直线检测HoughLines(magImg, lines, 1, CV_PI / 180, HOUGH_VOTE, 0, 0);// cout << "检测直线条数: " << lines.size() << endl;//绘制检测线for (int l = 0; l < lines.size(); l ){float rho = lines[l][0], theta = lines[l][1];Point pt1, pt2;//坐标变换生成线表达式double a = cos(theta), b = sin(theta);double x0 = a * rho, y0 = b * rho;pt1.x = cvRound(x0 1000 * (-b));pt1.y = cvRound(y0 1000 * (a));pt2.x = cvRound(x0 - 1000 * (-b));pt2.y = cvRound(y0 - 1000 * (a));line(houghImg, pt1, pt2, Scalar(255, 0, 0), 3, 8, 0);}// imshow("hough", houghImg);//获取角度float angel = 0;float m = PI / 90;float n = PI / 2;for (int l = 0; l < lines.size(); l ){//遍历检测直线的角度float theta = lines[l][1];if (abs(theta) > m && abs(n - theta) > m){//取有效角度angel = theta;break;}}//确保角度在0到90度内angel = angel < PI / 2 ? angel : angel - PI;//角度换算if (angel != PI / 2){//作图一目了然float angelT = srcImage.rows * tan(angel) / srcImage.cols;angel = atan(angelT);}float angel_rad = angel * 180 / PI;// cout << "旋转角度: " << angel_rad << endl;//取图像中心Point2f centerPoint = Point2f(nCols / 2, nRows / 2);double scale = 1;//计算旋转中心Mat rotateMat = getRotationMatrix2D(centerPoint, angel_rad, scale);//仿射变换Mat resultImage(grayImage.size(), srcImage.type());warpAffine(srcImage, resultImage, rotateMat, srcImage.size(), 1, 0, Scalar(255, 255, 255));return resultImage;
}
项目截图
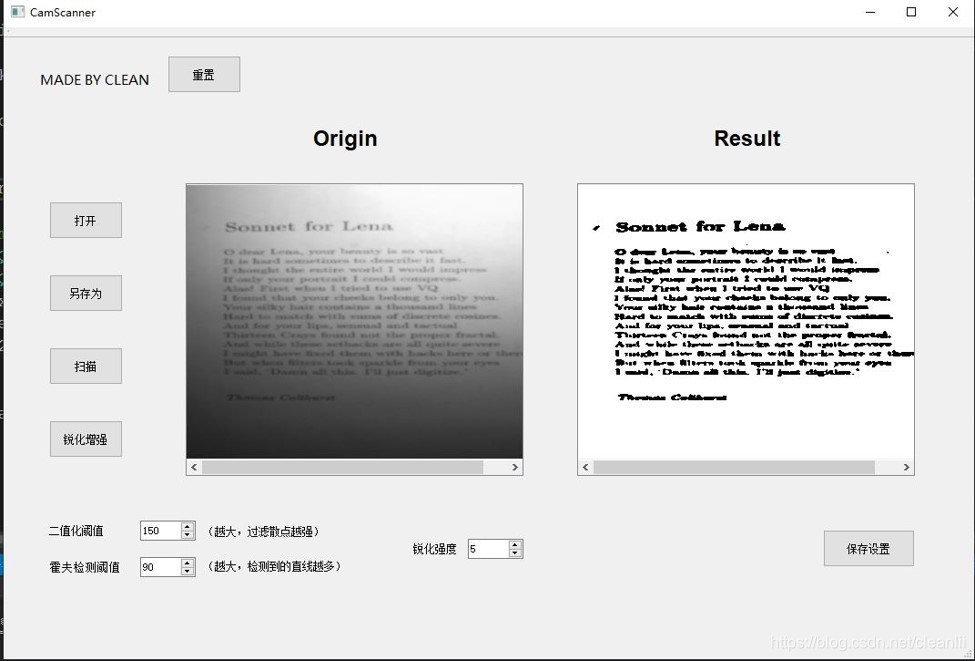
- 证件扫描
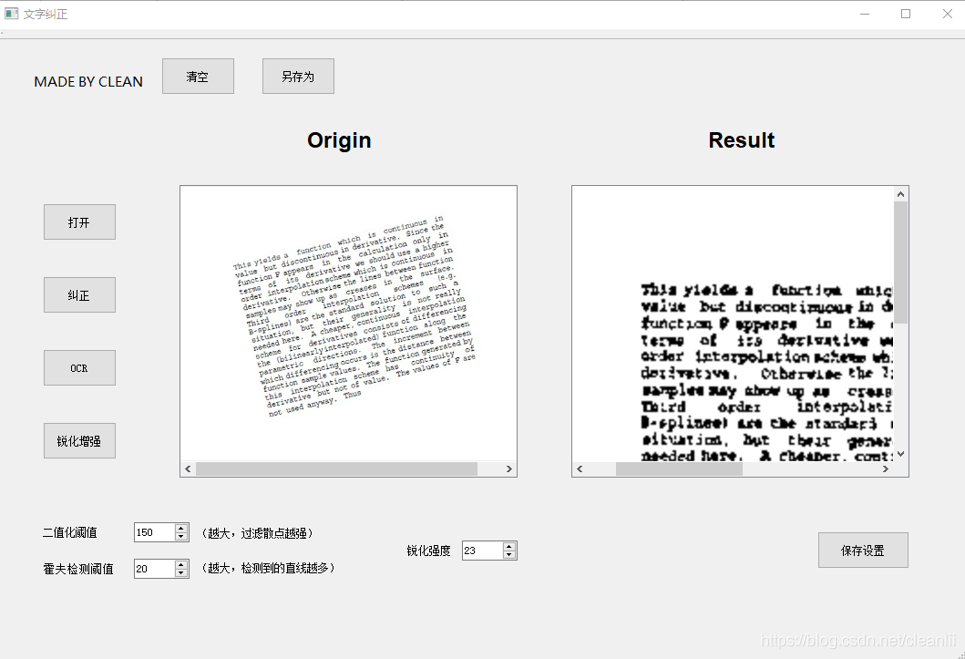
- 文字纠正
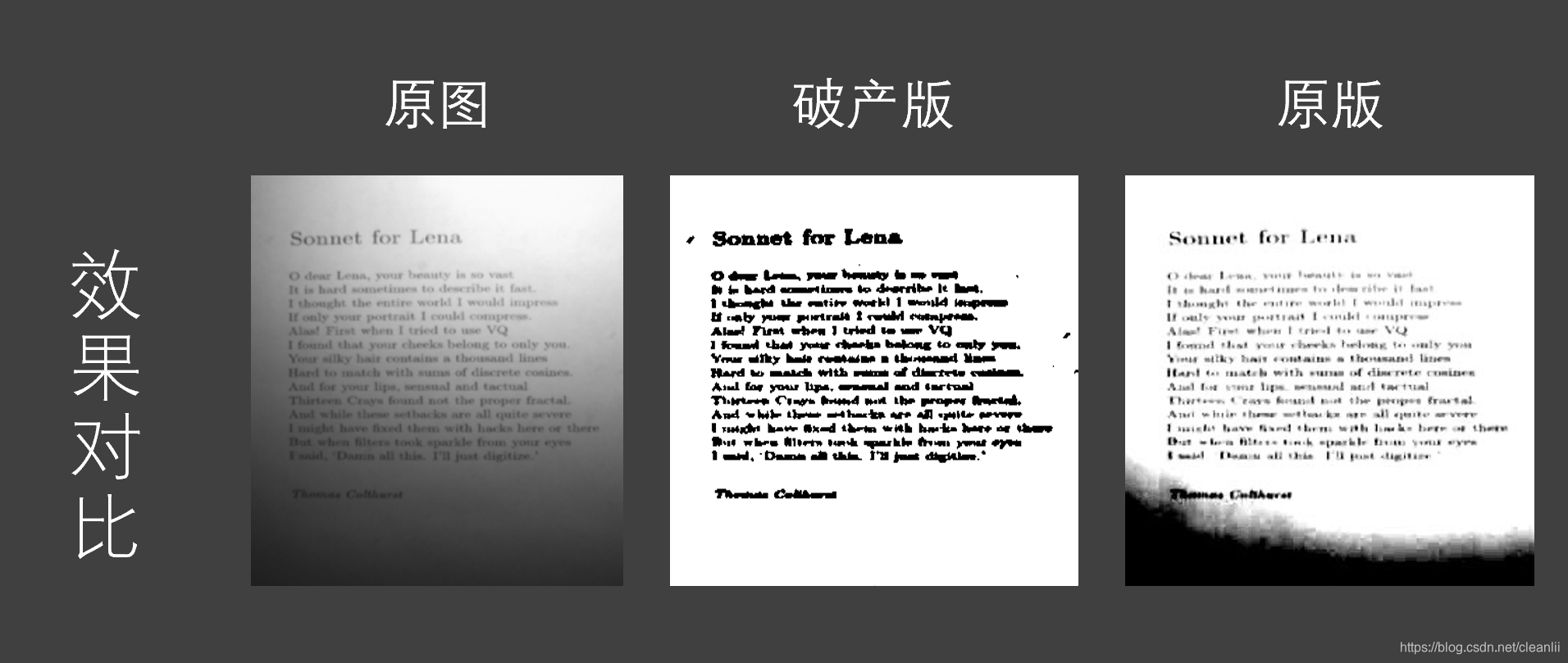
- 效果对比
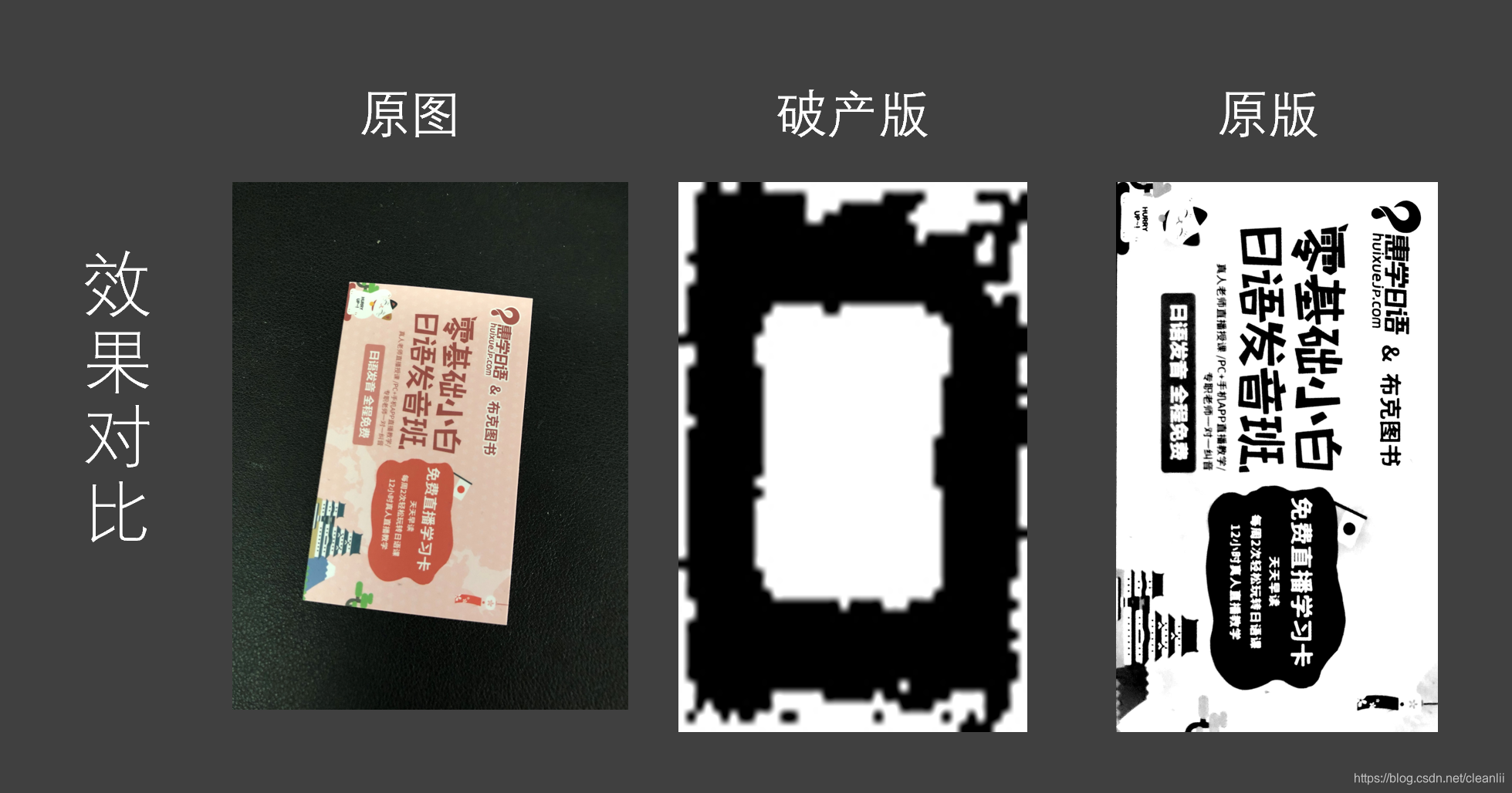
- 效果对比(娱乐向)
项目总结
-
本项目基本实现了证件扫描和文字纠正两大基本功能,其中类似“全能扫描王”的扫描功能被我单独做了个版本,所以上述截图UI有些不一样,特此说明;
-
在这种基于透视变化的算法中,可以看见一定弊端:直线检测的阈值、轮廓检测的标准、顶点筛选的严密性等,对最终的结果影响很大,所以找到合理的、或者自适应的参数是最关键一步;故市面上的扫描软件一定有更复杂的思路或算法,还需要继续学习!
-
刚开始写的时候对OCR等词汇的理解不当,所以在函数命名和UI设计上出现了失误,特此指出;OCR(Optical Character Recognition,光学字符识别)意为文字识别,与本项目的功能不同;
-
希望本文能帮助到那些刚入门图像处理的同学,咱们一起加油!
-
关于证件扫描算法的疑惑可以参考 这位大神的干货文章
-
完整源码链接(仅供参考)





![Kubernetes pod调度约束[亲和性 污点] 生命阶段 排障手段](https://img-blog.csdnimg.cn/6f088c56456341a997a940efd0df442e.png)
![[Pandas] 分组比例计算求和](https://img-blog.csdnimg.cn/6eab7e2e10ca421394c3d96be6c7fcc0.png)