文章目录
- 主要思想
- 约束建立IMU&Local & globalBA
- IMU预积分
- LocalBA
- GlobalBA
- 求解方法
- 常用的求解思路
- 改进增量BA方法
论文:
《ICE-BA: Incremental, Consistent and Efficient Bundle Adjustment for Visual-Inertial SLAM》
ICE-BA:增量、一致且高效的视觉惯性SLAM的Bundle Adjustment
主要思想
- 算法框架Local & globalBA:
该算法框架包含局部优化(Local BA)和全局优化(Global BA)两个部分。局部优化在一个临时滑动窗口内进行,以减少累积误差并尽快扩展地图;全局优化则以较低的频率运行,优化那些已从局部滑动窗口移除但在全局地图中选择为关键帧的帧。 - 高效的增量Bundle Adjustment(ICE-BA):
提出一种增量求解方法,使用Schur补+PCG加速求解。在每次迭代时,不对整个信息矩阵重新计算,仅对变化量较大的参数进行重新线性化。PCG用于求解位姿,而点的坐标使用回代计算得到。 - 全局一致性问题的解决:
在很多先进的SLAM系统中,全局一致性问题尚未得到解决。本文的方法保证在闭环过程中最小化重投影函数和惯性约束函数。
约束建立IMU&Local & globalBA
命名解释:
位姿 C t = ( T t , M t ) = ( ( R T , p t ) , ( v t , b t ) ) C_t=(T_t, M_t)=((R_T,p_t), (v_t, b_t)) Ct=(Tt,Mt)=((RT,pt),(vt,bt))
点:3维: X j X_j Xj,二维图像坐标: x i j x_ij xij表示点 X j X_j Xj被第i帧相机观察到的图像坐标。

IMU预积分
IMU预积分与VINS类似,采用QVPB的变量模式,即姿态、速度、位置、偏差(加速度、陀螺仪偏差)。
f i j i m u ( C i , C j ) = ( e r T , e v T , e p T , e b T ) T ∼ N ( 0 , Σ i j i m u ) e r = L o g ( ( E x p ( Δ J i j r ( b i − b ^ i ) ) Δ R i j ) T R j R i T ) e v = R i ( v j − v i − g Δ t i j ) − ( Δ v i j + Δ J i j v ( b i − v i j ) ) e p = R i ( p j − p i − v i Δ t i j − 1 2 g Δ t i j 2 ) − ( Δ p i j + Δ J i j p ( b i − b ^ i ) ) \begin{aligned} &f_{ij}^{\mathrm{imu}}(\mathbf{C}_{i},\mathbf{C}_{j})=(\mathbf{e}_{r}^{T},\mathbf{e}_{v}^{T},\mathbf{e}_{p}^{T},\mathbf{e}_{b}^{T})^{T}\sim\mathcal{N}(\mathbf{0},\mathbf{\Sigma}_{ij}^{\mathrm{imu}}) \\ &\mathbf{e}_{r}=\mathrm{Log}((\mathrm{Exp}(\Delta\mathbf{J}_{ij}^{r}(\mathbf{b}_{i}-\hat{\mathbf{b}}_{i}))\Delta\mathbf{R}_{ij})^{T}\mathbf{R}_{j}\mathbf{R}_{i}^{T}) \\ &\text{e} _{v}=\mathbf{R}_{i}(\mathbf{v}_{j}-\mathbf{v}_{i}-\mathbf{g}\Delta t_{ij})-(\Delta\mathbf{v}_{ij}+\Delta\mathbf{J}_{ij}^{v}(\mathbf{b}_{i}-\mathbf{v}_{ij})) \\ &\mathbf{e}_{p} =\mathbf{R}_{i}(\mathbf{p}_{j}-\mathbf{p}_{i}-\mathbf{v}_{i}\Delta t_{ij}-\frac{1}{2}\mathbf{g}\Delta t_{ij}^{2}) \\ &-\left(\Delta\mathbf{p}_{ij}+\Delta\mathbf{J}_{ij}^{p}(\mathbf{b}_{i}-\hat{\mathbf{b}}_{i})\right) \end{aligned} fijimu(Ci,Cj)=(erT,evT,epT,ebT)T∼N(0,Σijimu)er=Log((Exp(ΔJijr(bi−b^i))ΔRij)TRjRiT)ev=Ri(vj−vi−gΔtij)−(Δvij+ΔJijv(bi−vij))ep=Ri(pj−pi−viΔtij−21gΔtij2)−(Δpij+ΔJijp(bi−b^i))
此外,由于初始帧(锚点)相机位姿及yaw不可观,在VIO SLAM系统中,且IMU不包含磁力计。因为首帧相机位姿需要固定为先验。
视觉误差也同样与VINS类似,与VINS一致,包含3个方程:
- 先验,marg后的数据
- 视觉重投影,点的参数只有深度逆。
- imu预积分数据
LocalBA
包含一定窗口大小的误差方程,窗口中包含普通帧与关键帧。约束方程如下:
arg min { C i , ρ j ∣ i = t 0 ⋯ t , j ∈ V i } ∑ i = t 0 t ∑ j ∈ V i ∣ ∣ f i j v i s ( T i , T s j , ρ j ) ∣ ∣ Σ i j v i s + ∣ ∣ f t 0 p r i o r ( C t 0 ) ∣ ∣ Σ t 0 p r i o r + ∑ i = t 0 t − 1 ∣ ∣ f i , i + 1 i m u ( C i , C i + 1 ) ∣ ∣ Σ i , i + 1 i m u \arg\operatorname*{min}_{\{\mathbf{C}_{i},\rho_{j}|i=t_{0}\cdots t,j\in\mathcal{V}_{i}\}}\sum_{i=t_{0}}^{t}\sum_{j\in\mathcal{V}_{i}}||f_{ij}^{\mathrm{vis}}(\mathbf{T}_{i},\mathbf{T}_{s_{j}},\rho_{j})||_{\boldsymbol{\Sigma}_{ij}^{\mathrm{vis}}}\\+||f_{t_{0}}^{\mathrm{prior}}(\mathbf{C}_{t_{0}})||_{\boldsymbol{\Sigma}_{t_{0}}^{\mathrm{prior}}}+\sum_{i=t_{0}}^{t-1}||f_{i,i+1}^{\mathrm{imu}}(\mathbf{C}_{i},\mathbf{C}_{i+1})||_{\boldsymbol{\Sigma}_{i,i+1}^{\mathrm{imu}}} arg{Ci,ρj∣i=t0⋯t,j∈Vi}mini=t0∑tj∈Vi∑∣∣fijvis(Ti,Tsj,ρj)∣∣Σijvis+∣∣ft0prior(Ct0)∣∣Σt0prior+i=t0∑t−1∣∣fi,i+1imu(Ci,Ci+1)∣∣Σi,i+1imu
其中 V i \mathcal{V}_{i} Vi表示第 i帧相机观测到的左右点的集合。
GlobalBA
全局BA工作在低频的状态下,只处理关键帧。
关键帧的选定标准:当某帧包含了一定数个其他帧没有的特征点,则该帧被认定为关键帧。
其约束如下:
arg min { C i , ρ j ∣ i ∈ { k 1 ⋯ k m } , j ∈ V i } ∑ i = k 1 k m ∑ j ∈ V i ∣ ∣ f i j v i s ( T i , T s j , ρ j ) ∣ ∣ Σ i j v i s + ∣ ∣ f 0 p r i o r ( C k 1 ) ∣ ∣ Σ 0 p r i o r + ∑ i = 1 m − 1 ∣ ∣ f k i , k i + 1 i m u ( C k i , C k i + 1 ) ∣ ∣ Σ k i , k i + 1 i m u + ∑ ∣ ∣ f i r e l ( { T k ∈ L i } ) ∣ ∣ Σ i r e l \begin{aligned} &\arg\min_{\{\mathbf{C}_{i},\rho_{j}|i\in\{k_{1}\cdots k_{m}\},j\in\mathcal{V}_{i}\}}\sum_{i=k_{1}}^{k_{m}}\sum_{j\in\mathcal{V}_{i}}||f_{ij}^{\mathrm{vis}}(\mathbf{T}_{i},\mathbf{T}_{s_{j}},\rho_{j})||_{\boldsymbol{\Sigma}_{ij}^{\mathrm{vis}}}+ \\ &||f_{0}^{\mathrm{prior}}(\mathbf{C}_{k_{1}})||_{\boldsymbol{\Sigma}_{0}^{\mathrm{prior}}}+\sum_{i=1}^{m-1}||f_{k_{i},k_{i+1}}^{\mathrm{imu}}(\mathbf{C}_{k_{i}},\mathbf{C}_{k_{i+1}})||_{\boldsymbol{\Sigma}_{k_{i},k_{i+1}}^{\mathrm{imu}}}+ \\ &\sum||f_{i}^{\mathrm{rel}}(\{\mathbf{T}_{k\in\mathcal{L}_{i}}\})||_{\mathbf{\Sigma}_{i}^{\mathrm{rel}}} \end{aligned} arg{Ci,ρj∣i∈{k1⋯km},j∈Vi}mini=k1∑kmj∈Vi∑∣∣fijvis(Ti,Tsj,ρj)∣∣Σijvis+∣∣f0prior(Ck1)∣∣Σ0prior+i=1∑m−1∣∣fki,ki+1imu(Cki,Cki+1)∣∣Σki,ki+1imu+∑∣∣firel({Tk∈Li})∣∣Σirel
其中: L i \mathcal{L}_{i} Li表示与第i帧想关联的关键帧的集合。
相比localBA,globalBA多了一项Relative Marginalization相关的约束,用于约束最新被localBA marg的关键帧与窗口内最新的帧之间的关系。从而避免localBA的漂移。
求解方法
求解localBA以及globalBA构成的最小二乘问题,典型的方法是使用高斯牛顿法,逐步迭代得到全局最小解。
每次迭代时,需要通过计算最小二乘问题 arg min ϕ ∑ k ∣ ∣ f ~ k ( ϕ ) ∣ ∣ 2 \arg\min_{\phi}\sum_{k}||\tilde{f}_{k}(\phi)||^{2} argminϕ∑k∣∣f~k(ϕ)∣∣2的信息矩阵A及雅可比矩阵b来得到参数的更新量:
δ ϕ = A − 1 b = ( J T F ) − 1 J T r \delta \phi = A^{-1}b=(J^TF)^{-1}J^Tr δϕ=A−1b=(JTF)−1JTr
注意最小二乘问题的雅可比 b b b,这里是有高斯牛顿法近似得到的,不同于 f k f_k fk的雅可比。
f k ( ϕ − ⊕ δ ϕ ) ≈ J k δ ϕ + e k f_k(\phi^-\oplus\delta\phi)\approx\mathbf{J}_k\delta\phi+\mathbf{e}_k fk(ϕ−⊕δϕ)≈Jkδϕ+ek J k = ∂ f k ( ϕ − ⊕ δ ϕ ) ∂ δ ϕ ∣ δ ϕ = 0 \mathbf{J}_{k} = \frac{\partial f_{k}(\phi^{-}\oplus\delta\phi)}{\partial\delta\phi}|_{\delta\phi=\mathbf{0}} Jk=∂δϕ∂fk(ϕ−⊕δϕ)∣δϕ=0 e k = f k ( ϕ − ) \mathbf{e}_k = f_k(\phi^{-}) ek=fk(ϕ−)
求解:
A δ ϕ = b [ A ∣ b ] = ∑ k [ A k ∣ b k ] [ A k ∣ b k ] = [ J k T J k ∣ − J k e k ] \begin{aligned} \mathbf{A}\delta\phi & =\mathbf{b} \\ [\mathbf{A}|\mathbf{b}]& =\sum_{k}[\mathbf{A}_{k}|\mathbf{b}_{k}] \\ [\mathbf{A}_{k}|\mathbf{b}_{k}]& =[\mathbf{J}_k^T\mathbf{J}_k|-\mathbf{J}_k\mathbf{e}_k] \end{aligned} Aδϕ[A∣b][Ak∣bk]=b=k∑[Ak∣bk]=[JkTJk∣−Jkek]
常用的求解思路
技术手段:增量更新信息矩阵;Schur分块+PCG求解
由于SLAM的信息矩阵的特殊性:

其点云的为对角块矩阵,比位姿的维度大很多,利用Schur补,将point先marg出去,而后求解位姿,得到位姿后,通过回代再得到点的坐标解。
首先将信息矩阵的增广矩阵分块
[ A ∣ b ] = [ U W u W T V v ] [\mathbf{A}|\mathbf{b}]=\left[\begin{array}{cc|c}\mathbf{U}&\mathbf{W}&\mathbf{u}\\\mathbf{W}^T&\mathbf{V}&\mathbf{v}\end{array}\right] [A∣b]=[UWTWVuv]
ϕ = ( ϕ c T , ϕ p T ) T \phi = (\phi_{c}^{T},\phi_{p}^{T})^{T} ϕ=(ϕcT,ϕpT)T
采用增量式计算信息矩阵及雅可比的方式:
[ A ∣ b ] + = [ A ∣ b ] − + [ ∑ k ∈ L δ A k ∑ k ∈ L δ b k ] [\mathbf{A}|\mathbf{b}]^{+}=[\mathbf{A}|\mathbf{b}]^{-}+[\begin{array}{c}\sum_{k\in\mathcal{L}}\delta\mathbf{A}_{k}&\sum_{k\in\mathcal{L}}\delta\mathbf{b}_{k}\end{array}] [A∣b]+=[A∣b]−+[∑k∈LδAk∑k∈Lδbk]
使用 S S S表示marg点后得到的关于位姿的信息矩阵,问题变为:
S δ ϕ c = s [ S ∣ s ] = [ U − W V − 1 W T u − W V − 1 v ] \begin{aligned}&\mathbf{S}\delta\phi_{c}=\mathbf{s}\\&[\mathbf{S}|\mathbf{s}]=\left[\begin{array}{c|c}\mathbf{U}-\mathbf{W}\mathbf{V}^{-1}\mathbf{W}^{T}&\mathbf{u}-\mathbf{W}\mathbf{V}^{-1}\mathbf{v}\end{array}\right]\end{aligned} Sδϕc=s[S∣s]=[U−WV−1WTu−WV−1v]
具体计算:
[ S i 1 i 2 ∣ s i ] = [ U i 1 i 2 − ∑ j ∈ V i 1 ∪ V i 2 S i 1 i 2 j u i − ∑ j ∈ V i s i j ] \left.\left[\mathbf{S}_{i_{1}i_{2}}|\mathbf{s}_{i}\right]=\left[\begin{array}{cc}\mathbf{U}_{i_{1}i_{2}}-\sum_{j\in\mathcal{V}_{i_{1}}\cup\mathcal{V}_{i_{2}}}\mathbf{S}_{i_{1}i_{2}}^{j}&\mathbf{u}_{i}-\sum_{j\in\mathcal{V}_{i}}\mathbf{s}_{i}^{j}\end{array}\right.\right] [Si1i2∣si]=[Ui1i2−∑j∈Vi1∪Vi2Si1i2jui−∑j∈Visij]
[ S i 1 i 2 j ∣ s i j ] = [ W i 1 j V j j − 1 W i 2 j T ∣ W i j V j j − 1 v j ] ] [\mathbf{S}_{i_{1}i_{2}}^{j}|\mathbf{s}_{i}^{j}]=\left[\begin{array}{c}{\mathbf{W}_{i_{1}j}\mathbf{V}_{jj}^{-1}\mathbf{W}_{i_{2}j}^{T} \big| \mathbf{W}_{ij}\mathbf{V}_{jj}^{-1}\mathbf{v}_{j} \big]}\\\end{array}\right] [Si1i2j∣sij]=[Wi1jVjj−1Wi2jT WijVjj−1vj]]
作者提出了增量式的S的更新方式:
[ S i 1 i 2 ∣ s i ] + = [ S i 1 i 2 ∣ s i ] − + [ ∑ j ∈ P i 1 i 2 δ S i 1 i 2 j ∣ ∑ j ∈ P i i δ s i j ] ] P i 1 i 2 = P ∪ V i 1 ∪ V i 2 \begin{aligned} [\mathbf{S}_{i_{1}i_{2}}|\mathbf{s}_{i}]^{+}& \left.=\left[\mathbf{S}_{i_{1}i_{2}}|\mathbf{s}_{i}\right]^{-}+\left[\begin{array}{c}{\sum_{j\in\mathcal{P}_{i_{1}i_{2}}}\delta\mathbf{S}_{i_{1}i_{2}}^{j} \Big| \sum_{j\in\mathcal{P}_{ii}}\delta\mathbf{s}_{i}^{j} \Big]}\\\end{array}\right.\right] \\ \mathcal{P}_{i_{1}i_{2}}& =\mathcal{P}\cup\mathcal{V}_{i_{1}}\cup\mathcal{V}_{i_{2}} \end{aligned} [Si1i2∣si]+Pi1i2=[Si1i2∣si]−+[∑j∈Pi1i2δSi1i2j ∑j∈Piiδsij]]=P∪Vi1∪Vi2
在得到 [ S ∣ s ] [S|s] [S∣s]后,由于S的稀疏性( s i 1 , i 2 s_{i_1,i_2} si1,i2非0的条件是, i 1 i_1 i1, i 2 i_2 i2相机有共同观测点),使用PCG求解 ϕ c \phi_{c} ϕc,而后使用回代法求得 ϕ p \phi_p ϕp
δ ϕ p j = V j j − 1 ( v j − ∑ i ∈ X j W i j T δ ϕ c i ) \delta\phi_{p_{j}}=\mathbf{V}_{jj}^{-1}\left(\mathbf{v}_{j}-\sum_{i\in\mathcal{X}_{j}}\mathbf{W}_{ij}^{T}\delta\phi_{c_{i}}\right) δϕpj=Vjj−1 vj−i∈Xj∑WijTδϕci
X j \mathcal{X}_{j} Xj表示能够观测点点j的相机集合。
这里引入文中原话:
“due to the nature of SLAM problem, new states and measurements always arrive incrementally. As a result, only a small portion of variables change at each iteration”。这句话的因果。迭代iteration是指下降法中的迭代,每次迭代都需要对变量进行更新,从而得到新的线性化点。SLAM是时间顺序的,每帧会增加一些观测。这里混淆了每帧的到来,和每次的迭代这两个含义。从而使得增量法的出发点有了一定的问题。
关于iSAM的增量法可行原因是,iSAM是基于好的线性化点假设,可以理解为通过一次迭代便能够接近最小解。而使用iSAM的方法也可以计算一次迭代,而iSAM的增量计算不能工作在每次的迭代中。
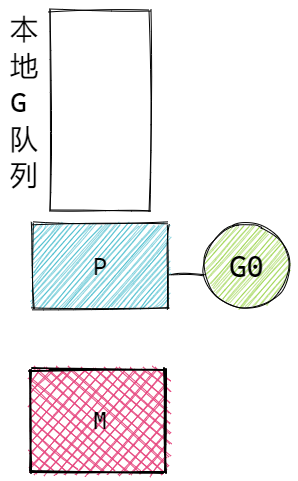
此外,引入作者另一篇论文《Robust Keyframe-based Dense SLAM with an RGB-D Camera》关于这部分求解的流程图:
普通解法:

增量解法流程:

从这篇RGBD论文中,作者将变量的更新值大于一定阈值的变量才会进行重新线性化,即更新雅可比。从而解释了上面关于SLAM每次迭代只需要更新很少雅可比的原因。但于此同时,同步引入误差到解中,一种精度换效率的方法。
改进增量BA方法
1、 增量ImprovementforLocalBA
IBA(Schur补,PCG增量求解) 能够显著加快global BA的求解速度。因为globalBA中存放的都是关键帧,帧间共同观测的点比较少,从而会保证S的稀疏性,从而保证PCG的有效性。
IBA(Schur补,PCG增量求解) 能够显著加快global BA的求解速度。因为globalBA中存放的都是关键帧,帧间共同观测的点比较少,从而会保证S的稀疏性,从而保证PCG的有效性。
作者提出将 ( x ) j \mathcal(x)_j (x)j集合分为多个小的集合,如下所示:

点的深度也对应上图,分为对应个。从而使得S矩阵从稠密矩阵变为对角带状矩阵。从而增加稀疏性。
2、 IncrementalPCGforIBA
当 δ ϕ c \delta\phi_c δϕc比较小时,对应的雅可比不更新。
3、 RelativeMarginalization
为了减少localBA由于边缘化的先验等引入的漂移误差。作者提出通过相对边缘化,保持先于边缘化和global BA 之间的一致性。
将当前位姿 C i C_i Ci,以及观测点的第一帧 C s j C_{s_j} Csj表示到参考帧下。
即都乘了 T k 0 − 1 T_{k_0}^{-1} Tk0−1
参考帧选的是最近的关键帧,用相对参考帧的描述(位姿和点在参考系下的表示)。而不是绝对的位姿和点的世界坐标系的表示。
总结:
这篇论文提出了几个关于增量迭代求解的技术思路,精度换效率。多是在技术角度上提出,而非算法理论创新。