原文链接:
大模型是这样训练的
AI因你而升温,记得加个星标哦!
大家好,我是泰哥。距离上次写技术贴已经1年有余,这一年当中算法技术的发展可以说是日新月异。今天和大家聊聊大模型的训练的三个阶段,分别为有监督学习(SFT)、奖励模型训练(RW)与强化学习(PPO)阶段,我对以上的训练过程会加上一些自己的理解。
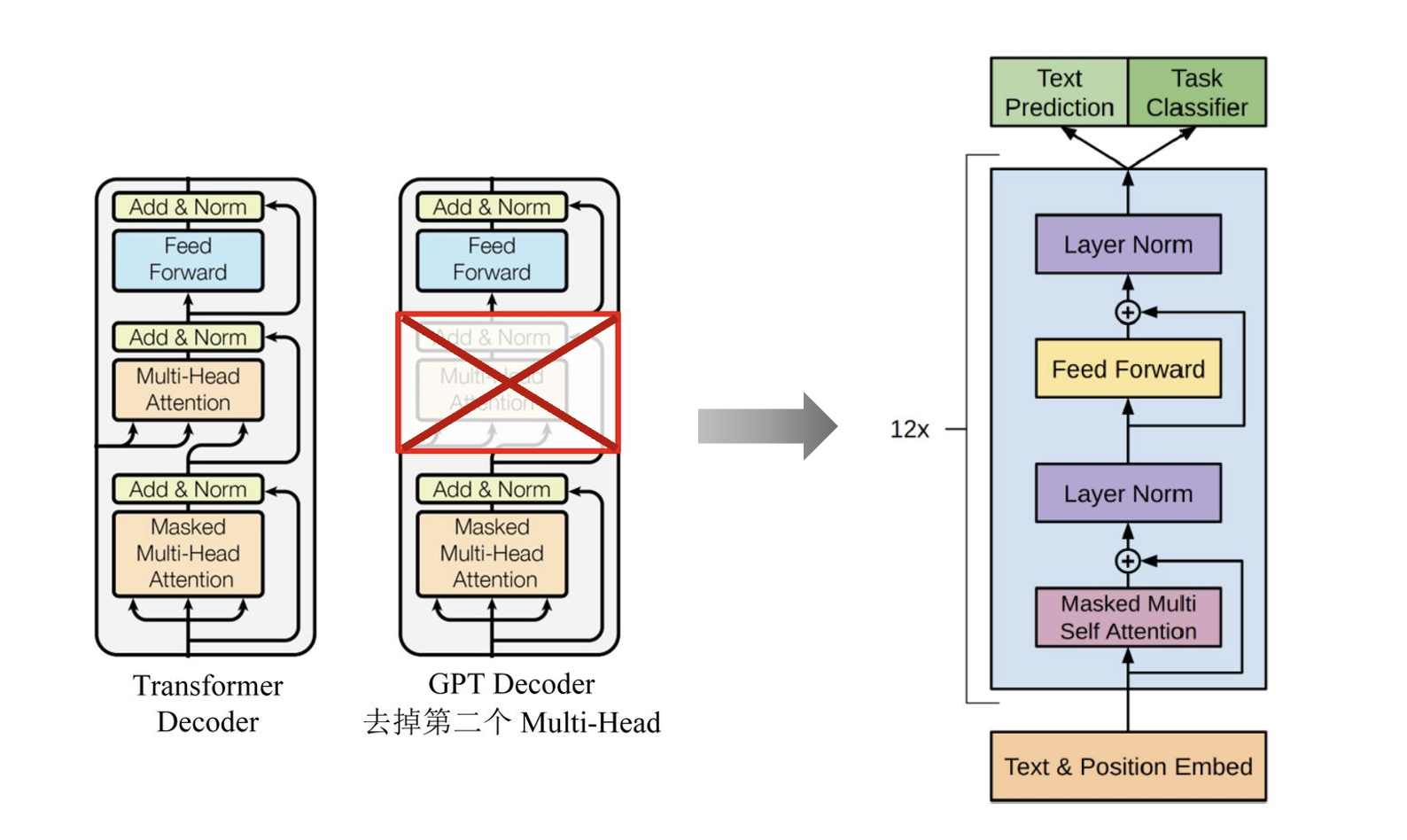
GPT使用Transformer decoder部分作为语言模型的框架,并将decoder中的Multi-head Attention层删除,其结构和计算过程如上图。因为decoder中的第一个自注意力计算中有Mask机制,所以计算每个单词的预测概率时,只考虑一句话中某个词的左侧词汇信息(单向Transformer)对本词进行预测,并不像Bert和ELMo一样有上下文信息,所以Mask的使用使模型看不见未来的信息,得到的模型泛化能力更强。
其中各个研究院对部分细节有所改良,比如:
- 使用了前归一化(Post-Norm),解释是整体上更难出现梯度消失的问题,使得模型的训练更加稳定。
- 采用旋转位置编码(RoPE),与相对位置编码相比RoPE 具有更好的外推性。外推性是指大模型在训练时和预测时的输入长度不一致,导致模型的泛化能力下降的问题。
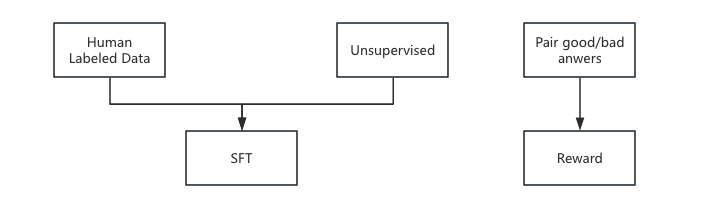
1 有监督学习(SFT)
这个阶段虽然称为有监督学习,但其实在具体实操中,它也是分为了两个步骤:
- 先使用大量语料进行无监督学习,训练出一个语言模型的基座,这就是大模型的
generate方法,展现的是大模型的续写能力 - 人工整理QA语料对大模型进行有监督训练,这是大模型的
chat方法,展现出了大模型的对话能力
2 Reward Model奖励模型训练
大模型会对一个问题回答出的多个不同答案,我们首先需要对这些答案进行优先级标注排序(不是直接打分,因为绝对分数很难统一,我们能更容易的判断出哪个回答更好,使用相对替代绝对),然后根据这个排序结果训练奖励模型。这个模型的底座就是第一阶段训练出的SFT模型,只是把最后一层改为一个神经元即可,就是输出的分数,为一个回归模型,后续将用这个模型对每个回答进行打分评估。
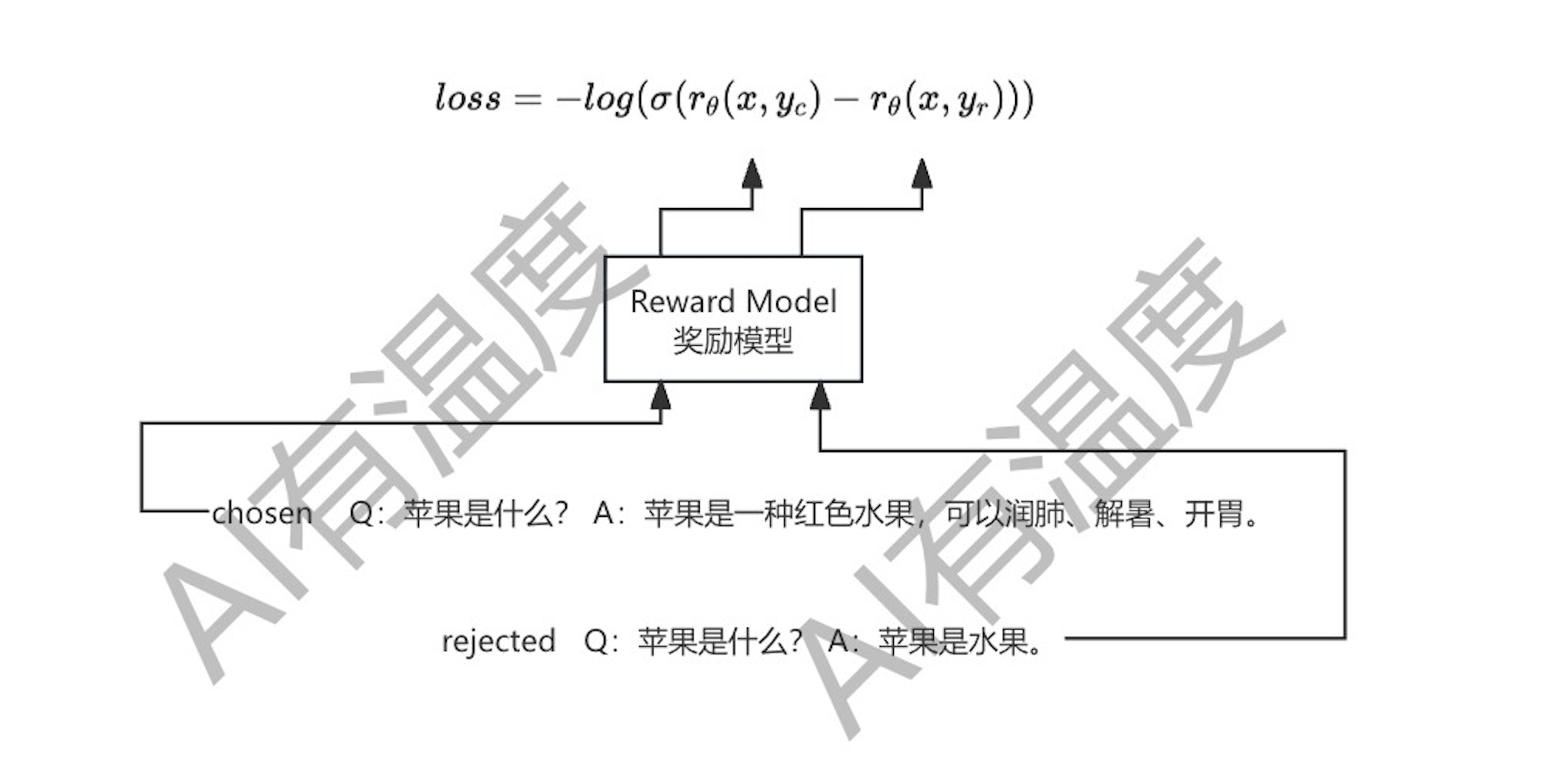
奖励模型的核心是它的损失函数:
l o s s = − l o g ( σ ( r θ ( x , y c ) − r θ ( x , y r ) ) ) loss = -log(\sigma(r_\theta(x, y_c)-r_\theta(x,y_r))) loss=−log(σ(rθ(x,yc)−rθ(x,yr)))
其中c代表chosen,是排名较高的回答,r代表reject,是排名较低的回答。最终的目的就是使排名靠前的回答得分相应的变高。
比如Q:苹果是什么?
A1:苹果是一种红色水果,可以润肺、解暑、开胃。
A2:苹果的品种繁多,根据颜色、大小、口感和用途等不同特点,可以分为多个品种。有的苹果品种适合鲜食,口感脆甜;有的适合烹饪,如做苹果派或苹果酱;还有的适合制酒或制醋。此外,美国苹果公司是全球知名的科技公司。
A3:苹果是水果。
人工标记员打分A2>A1>A3,我们把QA2&QA1、QA2&QA3、QA1&QA3两两放入模型进行打分,然根据损失函数对模型进行反向传播,最后就可以使A2的分数高于A1、A1的分数高于A3。根据不同答案的优先级顺序,就可以训练出奖励模型。
3 强化学习PPO
强化学习的目标就是模型可以自我迭代,其损失函数包括两部分构成:
- 我们已经进行过有监督训练,所以希望模型的回答结果最好与之前SFT模型的回答分布相近,否则模型可能钻空子,回答一个与有监督答案不符,但是奖励模型给了高分的答案,可以理解为“幻觉问题”。
- 模型的回答都是高分回答。
我们就是想达到以上要求,所以设计出了如下一系列的训练方法,一共有四个主要模型,分别是:
- Actor Model:演员模型,这就是我们想要训练的目标语言模型
- Critic Model:评论家模型,它的作用是预期收益
- Reward Model:奖励模型,它的作用是计算实际收益
- Reference Model:参考模型,它的作用是给语言模型增加一些“约束”,防止语言模型训歪,使模型的回答结果最好与之前SFT模型的回答分布相近
Actor与Reference的初始化模型就是SFT模型,Reward与Critic的初始化模型就是Reward模型,其中Actor与Critic在后续训练中需要更新参数,而Reward与Reference Model是参数冻结的。
总步骤为下图标注所示,请大家参考:
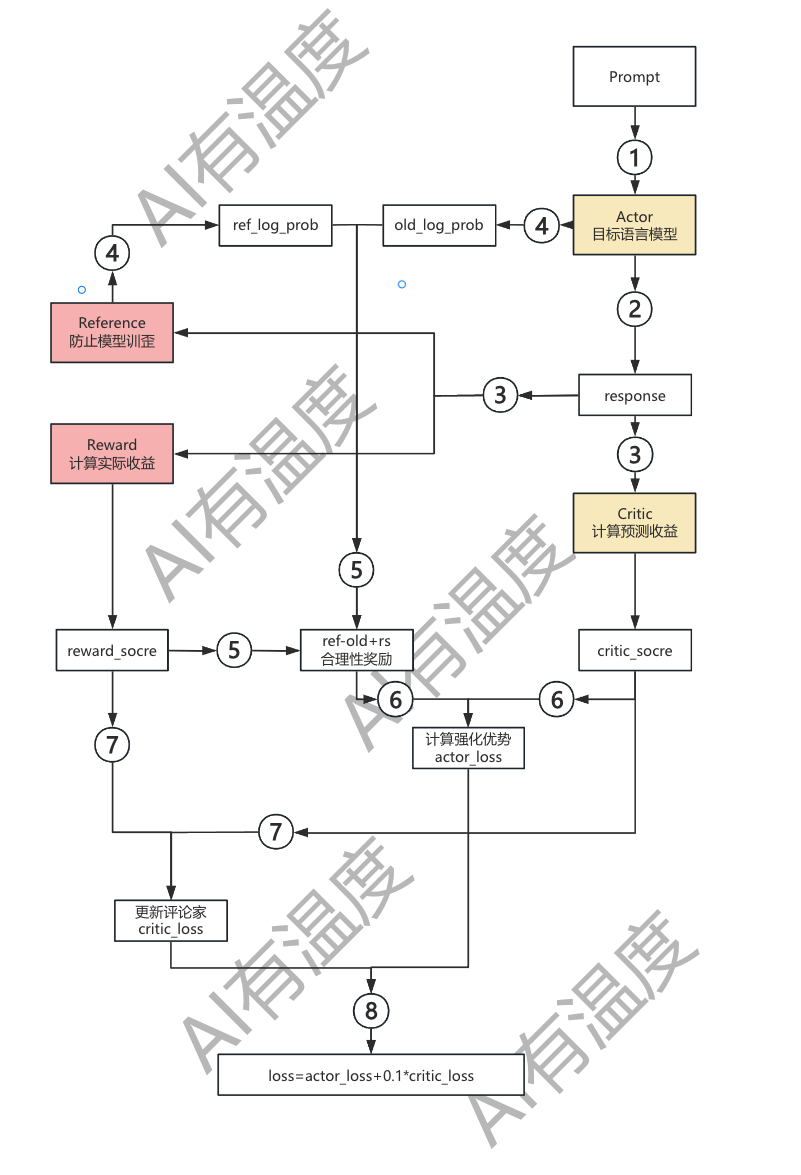
第一步(1号)
给Actor模型输入问题Prompt,Actor模型会有两个输出:
- 生成的回答response
- 还有给出上一部分的文字,每生成下一个字的概率
p(token|context),记为old_log_prob,是一个张量,长度就是response的长度
第二步(3号)
将问题与生成的回答作为输入:
- 输入给Ref模型,会得出在原先模型下输出该句话的张量分布
p(token|context),记为ref_log_prob,是一个张量,长度就是response的长度 - 输入给Reward模型,会得出模型的实际收益,是一个分数
- 输入给Critic模型,评论家会为 response 中的每个 token 计算一个预期收益,第 i个预期收益记为 values[i]
第三步(6号)
首先我们明确强化学习中的一个关键概念——优势。我们将优势定义为“实际获得的收益超出预期的程度”, PPO 计算优势的方法:优势=实际收益-预期收益。预期收益为Critic模型直接计算得出,我们来看看实际收益是如何设计算的。
在第一步与第二步中我们得到了在原先模型下输出的概率分布ref_log_prob与在Actor模型下输出的概率分布old_log_prob。
$$
reward[i]= \begin{cases} ref_log_prob[i] - old_log_prob[i], & \text {i< N N N} \
ref_log_prob[N]-old_log_prob[N]+score, & \text{i= N N N} \end{cases}
$$
来理解一下这个式子(简化的KL散度):
- ref_log_prob[i] 越高,ref越认可actor的输出,说明输出更守规矩,因此应该获得更高的奖励
- old_log_prob[i] 越高,actor获得的奖励反而更低。old_log_prob[i] 作为正则项,可以保证概率分布的多样性
- 我们只在最后一个token上应用结果正确性奖励(reward_model的输出),加上score分数
通俗来说,整个reward的计算逻辑是典型的霸总逻辑:除非你能拿到好的结果(整句话高分),否则你就得给我守规矩(符合SFT的token分布)。
对于语言模型而言,生成第i个token的实际收益就是:从生成第i个token开始到生成第N个token为止,所能获得的所有奖励的总和。我们用return来表示实际收益,它的计算方式如下:
r e t u r n [ i ] = r e w a r d [ i ] + . . . + r e w a r d [ N ] return[i] = reward[i] +...+reward[N] return[i]=reward[i]+...+reward[N]
在算出实际收益与预期收益后,要做的就是强化优势动作:
a [ i ] = r e t u r n [ i ] − v a l u e s [ i ] a[i] = return[i] - values[i] a[i]=return[i]−values[i]
在语言模型中,根据上下文生成一个 token 就是所谓的“动作”。强化优势动作表示:如果在上下文(context)中生成了某个 token,并且这个动作的优势很高,那么我们应该增加生成该 token 的概率,即增加 p(token|context)的值。
由于演员模型建模了p(token|context),所以我们可以给演员模型设计一个损失函数,通过优化损失函数来实现“强化优势动作”:
a c t o r _ l o s s = − 1 N ∑ i = 1 N a [ i ] × p ( t o k e n [ i ] ∣ c o n t e x t ) actor\_loss =-\frac{1}{N} \sum_{i=1}^{N} a[i] \times p( token [\mathrm{i}] \mid context ) actor_loss=−N1i=1∑Na[i]×p(token[i]∣context)
其中:
- 当优势大于 0 时,概率越大,loss 越小;因此优化器会通过增大概率(即强化优势动作)来减小 loss
- 当优势小于 0 时,概率越小,loss 越小;因此优化器会通过减小概率(即弱化劣势动作)来减小 loss
a c t o r _ l o s s = − 1 N ∑ i = 1 N a [ i ] × p ( token [ i ] ∣ context ) p old ( token [ i ] ∣ context ) actor\_loss =-\frac{1}{N} \sum_{i=1}^{N} a[i] \times \frac{p(\text { token }[\mathrm{i}] \mid \text { context })}{p_{\text {old }}(\text { token }[\mathrm{i}] \mid \text { context })} actor_loss=−N1i=1∑Na[i]×pold ( token [i]∣ context )p( token [i]∣ context )
实际使用时会采用如上公式, p o l d p_{old} pold使用的是本次参数更新前的Actor模型。直观来说,当生成某个 token 的概率已经很大了的时候,即便这个动作的优势很大,也不要再使劲增大概率了。或者更通俗地说,就是步子不要迈得太大。
第四步(7号)
前面我们提到过,评论家会为 response 中的每个 token 计算一个预期收益,第 i个预期收益记为 values[i],因为Critic不准,所以使用损失函数MSE来衡量评论家预期收益和真实收益之间的差距,在提升Actor的同时升级Critic:
c r i t i c _ l o s s = 1 2 N ∑ i = 1 N ( values [ i ] − returns [ i ] ) 2 critic\_loss =\frac{1}{2 N} \sum_{i=1}^{N}(\text { values }[i]-\operatorname{returns}[i])^{2} critic_loss=2N1i=1∑N( values [i]−returns[i])2
第五部(8号)
最终优化时用的 loss 是演员和评论家损失函数的加权和:
L o s s = a c t o r _ l o s s + 0.1 × c r i t i c _ l o s s Loss=actor\_loss+0.1\times critic\_loss Loss=actor_loss+0.1×critic_loss
以上就是大模型训练的设计思路及流程。
4 个人理解
大模型在训练过程中损失函数的设计,主要就是为了使模型达到分布合理与分高的双重目的:
- 在分布合理方面:使用
ref_log_prob-old_log_prob进行模拟,同时对大模型正经的胡说八道进行纠正,避免模型回答一个与答案不符但奖励是高分的答案 - 模型希望答案的分值越高越好
若对模型进行优化,我认为可以加大答案符合原先回答分布概率的权重来进一步优化“幻觉”问题。
5 DPO模型训练方法
RLHF通常包含三个步骤:SFT、 Reward Model、 PPO。该方案优点不需多说,缺点也很明显:训练流程繁琐、算法复杂、超参数多和计算量大,因此RLHF替代方案层出不穷。
DPO(Direct Preference Optimization,直接优化策略)是一种非常高效的RLHF算法。它巧妙地绕过了构建奖励模型和强化学习这两个的繁琐过程,直接通过偏好数据进行微调,效果简单粗暴,在使模型输出更符合人类偏好的同时,极大地缩短了训练时间和难度。
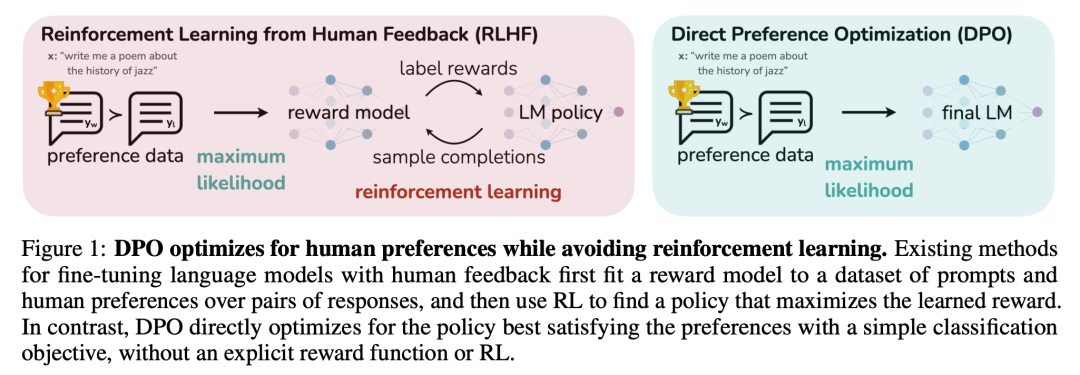
DPO需要的数据与RLHF一致,都是经过人工排序后的QA语料对。主要不同就是损失函数的设计:
L D P O ( π θ ; π r e f ) = − E ( x , y w , y l ) ∼ D [ log σ ( β log π θ ( y c ∣ x ) π r e f ( y c ∣ x ) − β log π θ ( y r ∣ x ) π r e f ( y r ∣ x ) ) ] \mathcal{L}_{\mathrm{DPO}}\left(\pi_{\theta} ; \pi_{r e f}\right)=-\mathbb{E}_{\left(x, y_{w}, y_{l}\right) \sim \mathcal{D}}\left[\log \sigma\left(\beta \log \frac{\pi_{\theta}\left(y_{c} \mid x\right)}{\pi_{r e f}\left(y_{c} \mid x\right)}-\beta \log \frac{\pi_{\theta}\left(y_{r} \mid x\right)}{\pi_{r e f}\left(y_{r} \mid x\right)}\right)\right] LDPO(πθ;πref)=−E(x,yw,yl)∼D[logσ(βlogπref(yc∣x)πθ(yc∣x)−βlogπref(yr∣x)πθ(yr∣x))]
其中:
- y c y_c yc是偏好数据对中好的回答 (chosen), y r y_r yr则是偏好数据对中坏的回答(rejected)
- π θ ( y c ∣ x ) \pi_{\theta}\left(y_{c}\mid x\right) πθ(yc∣x)是当给定输入为x时,当前策略生成好的答案的概率
- π r e f ( y c ∣ x ) \pi_{ref}\left(y_{c}\mid x\right) πref(yc∣x)是当给定输入为x时,原始(reference)策略生成好的答案的概率
- 当$-logsigmoid 函数里面的部分越大时,整体的 l o s s 就越小,所以对于 D P O 的 l o s s ,我们只需要将 函数里面的部分越大时,整体的 loss 就越小,所以对于 DPO 的 loss,我们只需要将 函数里面的部分越大时,整体的loss就越小,所以对于DPO的loss,我们只需要将-logsigmoid 函数里面的部分最大化即可。再简化一下上述的 l o s s , 只提取 函数里面的部分最大化即可。再简化一下上述的 loss, 只提取 函数里面的部分最大化即可。再简化一下上述的loss,只提取-logsigmoid $函数里面的部分, 我们可以得到:
β log π θ ( y c ∣ x ) π r e f ( y c ∣ x ) − β log π θ ( y r ∣ x ) π r e f ( y r ∣ x ) = β ( [ log π θ ( y c ∣ x ) − log π θ ( y r ∣ x ) ] − [ log π r e f ( y c ∣ x ) − log π r e f ( y r ∣ x ) ] ) \\\\\begin{array}{c}\\\beta \log \frac{\pi_{\theta}\left(y_{c} \mid x\right)}{\pi_{r e f}\left(y_{c} \mid x\right)}-\beta \log \frac{\pi_{\theta}\left(y_{r} \mid x\right)}{\pi_{r e f}\left(y_{r} \mid x\right)}= \\\\\beta\left(\left[\log \pi_{\theta}\left(y_{c} \mid x\right)-\log \pi_{\theta}\left(y_{r} \mid x\right)\right]-\left[\log \pi_{r e f}\left(y_{c} \mid x\right)-\log \pi_{r e f}\left(y_{r} \mid x\right)\right]\right)\\\end{array}\\\\\\ βlogπref(yc∣x)πθ(yc∣x)−βlogπref(yr∣x)πθ(yr∣x)=β([logπθ(yc∣x)−logπθ(yr∣x)]−[logπref(yc∣x)−logπref(yr∣x)])
由此可以看出,其实 DPO 期望最大化的就是奖励模型对chosen数据和rejected数据的差值,从而来达到使模型的回答更偏向于人类排序靠前回答的目标。
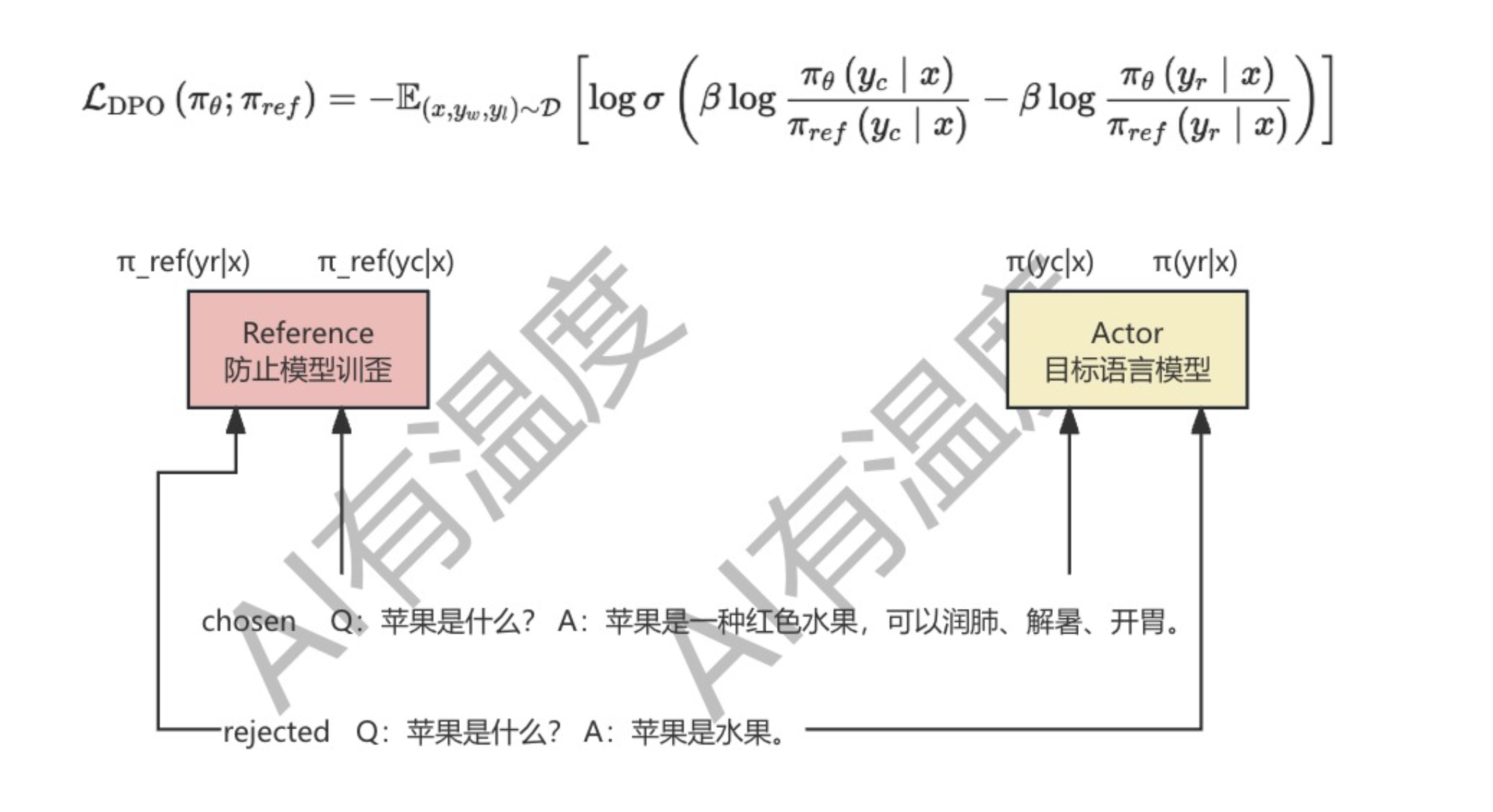
直接策略优化(DPO)算法巧妙地将reward model和强化学习两个步骤合并,使得训练更加的快速高效,在它的训练过程中Reference参数固定,只对目标语言模型进行参数更新,调试更加简单。
在上述DPO推导结果中看似非常完美,但实际使用过程中与PPO优化算法仍有差距,我认为主要是因为DPO的训练目标会导致过拟合, 在下式中的 π θ ( y r ∣ x ) \pi_{\theta}\left(y_{r}\mid x\right) πθ(yr∣x)优化策略为零,那么就可以使得偏好概率变的很大,整体的损失很小。
L D P O ( π θ ; π r e f ) = − E ( x , y w , y l ) ∼ D [ log σ ( β log π θ ( y c ∣ x ) π r e f ( y c ∣ x ) − β log π θ ( y r ∣ x ) π r e f ( y r ∣ x ) ) ] \mathcal{L}_{\mathrm{DPO}}\left(\pi_{\theta} ; \pi_{r e f}\right)=-\mathbb{E}_{\left(x, y_{w}, y_{l}\right) \sim \mathcal{D}}\left[\log \sigma\left(\beta \log \frac{\pi_{\theta}\left(y_{c} \mid x\right)}{\pi_{r e f}\left(y_{c} \mid x\right)}-\beta \log \frac{\pi_{\theta}\left(y_{r} \mid x\right)}{\pi_{r e f}\left(y_{r} \mid x\right)}\right)\right] LDPO(πθ;πref)=−E(x,yw,yl)∼D[logσ(βlogπref(yc∣x)πθ(yc∣x)−βlogπref(yr∣x)πθ(yr∣x))]
令 π θ ( y r ∣ x ) → 0 \pi_{\theta}\left(y_{r}\mid x\right)\rightarrow0 πθ(yr∣x)→0,那么 − β log π θ ( y r ∣ x ) π r e f ( y r ∣ x ) → + ∞ -\beta \log \frac{\pi_{\theta}\left(y_{r} \mid x\right)}{\pi_{r e f}\left(y_{r} \mid x\right)}\rightarrow +\infty −βlogπref(yr∣x)πθ(yr∣x)→+∞,损失就能一下降低下来, 直觉的理解是模型随便胡说的情况下就能使得Loss降低,给了钻空子的空间,没有像PPO损失函数考虑了结果整体的分值,因为PPO的要求是如果除非你能拿到好的结果(整句话高分),否则你就得给我守规矩(结果合理分布)。
原文链接:
大模型是这样训练的