功能简介
串行通信接口常常用于在计算机和低速外部设备之间传输数据。串口通信存在多种标准,以RS422为例,它将数据分成多个位,采用异步通信方式进行传输。
本文基于Xilinx VCU128 FPGA开发板,对RS422串口通信进行学习。
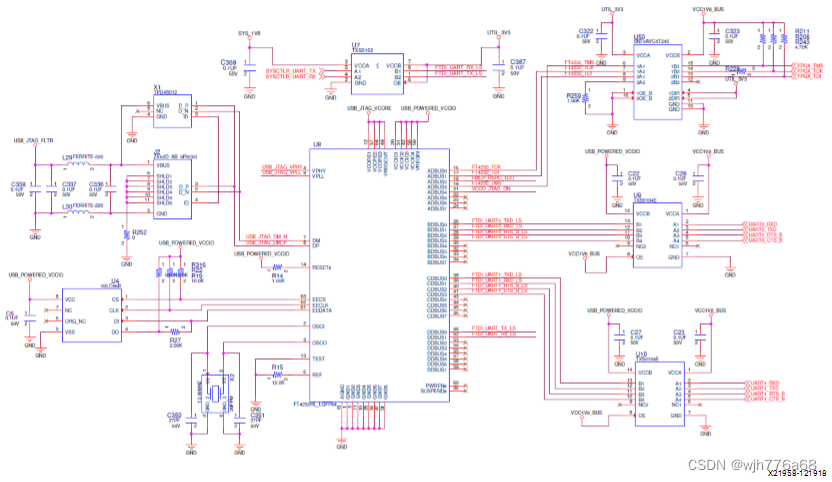
根据用户手册ug1302,128中采用了一款来自未来科技(Future Technology Devices International Ltd.)的USB转UART的芯片FT4232HL(芯片手册)。
FT4232HL芯片能够将USB接口转化为4个串口通道,并支持配置4个串口通道为不同类型的串口协议,根据FT4232HL芯片手册(P10)可以看到在配置为RS422模式下串口通道各引脚功能如下:

在实际使用中,Xilinx配置芯片的通道A为JTAG模式用于JTAG调试链,通道B与通道C用于UART串口通信,通道D用于SYSCTLR。其中通道B、C仅引出了TXD、RXD、RTS_n、CTS_n四根引脚。其中通道C的TXD、RXD的引脚位置可通过如下约束获取
set_property BOARD_PART_PIN USB_UART1_TX [get_ports channel_tx]
set_property BOARD_PART_PIN USB_UART1_RX [get_ports channel_rx]
SystemVerilog实现(ft4232hl_uart.sv)
根据422协议规定,编写串口接收代码如下,主要功能包括:
- 采用偶校验、1停止位、8数据位。
- 采样采用mmcm产生的400MHz时钟(800MHz时ila存在时序违例),采样串口接收到的数据时采取多次采样方式,即总样本里超过75%为1则为1,少于25%为1则为0。
- vio用于将采样次数适配到串口波特率,由于采样时钟为400MHz,当需要波特率为115200bps时,需要vio设置采样次数为3472。
- ila用于抓取串口接收到的字节数据、以及是否存在错误(无停止位错误、校验位错误、采样结果不确定错误)。
`timescale 1ns / 1ps
//
// Company:
// Engineer: wjh776a68
//
// Create Date: 03/15/2024 07:45:09 PM
// Design Name:
// Module Name: ft4232hl_uart
// Project Name:
// Target Devices: XCVU37P
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//// ===================================================================
// =
// = https://ftdichip.com/wp-content/uploads/2020/08/DS_FT4232H.pdf
// = P15 signals difinition
// =
// ===================================================================module ft4232hl_uart(input logic default_clk_p ,input logic default_clk_n ,input logic reset ,input logic channel_rx ,output logic channel_tx
// input logic channel_rts_n ,
// output logic channel_cts_n
);// assign channel_cts_n = 1;logic clk_100MHz;IBUFDS #(.DIFF_TERM("FALSE"), // Differential Termination.IBUF_LOW_PWR("TRUE"), // Low power="TRUE", Highest performance="FALSE" .IOSTANDARD("DEFAULT") // Specify the input I/O standard) IBUFDS_inst (.O(clk_100MHz), // Buffer output.I(default_clk_p), // Diff_p buffer input (connect directly to top-level port).IB(default_clk_n) // Diff_n buffer input (connect directly to top-level port));logic mmcm_fbclk_s;logic mmcm_locked_s;logic clk_800MHz;MMCME4_BASE #(.BANDWIDTH("OPTIMIZED"), // Jitter programming.CLKFBOUT_MULT_F(8.0), // Multiply value for all CLKOUT.CLKFBOUT_PHASE(0.0), // Phase offset in degrees of CLKFB.CLKIN1_PERIOD(10.0), // Input clock period in ns to ps resolution (i.e., 33.333 is 30 MHz)..CLKOUT0_DIVIDE_F(2.0), // Divide amount for CLKOUT0.CLKOUT0_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT0.CLKOUT0_PHASE(0.0), // Phase offset for CLKOUT0.CLKOUT1_DIVIDE(1), // Divide amount for CLKOUT (1-128).CLKOUT1_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT outputs (0.001-0.999)..CLKOUT1_PHASE(0.0), // Phase offset for CLKOUT outputs (-360.000-360.000)..CLKOUT2_DIVIDE(1), // Divide amount for CLKOUT (1-128).CLKOUT2_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT outputs (0.001-0.999)..CLKOUT2_PHASE(0.0), // Phase offset for CLKOUT outputs (-360.000-360.000)..CLKOUT3_DIVIDE(1), // Divide amount for CLKOUT (1-128).CLKOUT3_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT outputs (0.001-0.999)..CLKOUT3_PHASE(0.0), // Phase offset for CLKOUT outputs (-360.000-360.000)..CLKOUT4_CASCADE("FALSE"), // Divide amount for CLKOUT (1-128).CLKOUT4_DIVIDE(1), // Divide amount for CLKOUT (1-128).CLKOUT4_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT outputs (0.001-0.999)..CLKOUT4_PHASE(0.0), // Phase offset for CLKOUT outputs (-360.000-360.000)..CLKOUT5_DIVIDE(1), // Divide amount for CLKOUT (1-128).CLKOUT5_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT outputs (0.001-0.999)..CLKOUT5_PHASE(0.0), // Phase offset for CLKOUT outputs (-360.000-360.000)..CLKOUT6_DIVIDE(1), // Divide amount for CLKOUT (1-128).CLKOUT6_DUTY_CYCLE(0.5), // Duty cycle for CLKOUT outputs (0.001-0.999)..CLKOUT6_PHASE(0.0), // Phase offset for CLKOUT outputs (-360.000-360.000)..DIVCLK_DIVIDE(1), // Master division value.IS_CLKFBIN_INVERTED(1'b0), // Optional inversion for CLKFBIN.IS_CLKIN1_INVERTED(1'b0), // Optional inversion for CLKIN1.IS_PWRDWN_INVERTED(1'b0), // Optional inversion for PWRDWN.IS_RST_INVERTED(1'b0), // Optional inversion for RST.REF_JITTER1(0.0), // Reference input jitter in UI (0.000-0.999)..STARTUP_WAIT("FALSE") // Delays DONE until MMCM is locked)MMCME4_BASE_inst (.CLKFBOUT(mmcm_fbclk_s), // 1-bit output: Feedback clock pin to the MMCM.CLKFBOUTB(), // 1-bit output: Inverted CLKFBOUT.CLKOUT0(clk_800MHz), // 1-bit output: CLKOUT0.CLKOUT0B(), // 1-bit output: Inverted CLKOUT0.CLKOUT1(), // 1-bit output: CLKOUT1.CLKOUT1B(), // 1-bit output: Inverted CLKOUT1.CLKOUT2(), // 1-bit output: CLKOUT2.CLKOUT2B(), // 1-bit output: Inverted CLKOUT2.CLKOUT3(), // 1-bit output: CLKOUT3.CLKOUT3B(), // 1-bit output: Inverted CLKOUT3.CLKOUT4(), // 1-bit output: CLKOUT4.CLKOUT5(), // 1-bit output: CLKOUT5.CLKOUT6(), // 1-bit output: CLKOUT6.LOCKED(mmcm_locked_s), // 1-bit output: LOCK.CLKFBIN(mmcm_fbclk_s), // 1-bit input: Feedback clock pin to the MMCM.CLKIN1(clk_100MHz), // 1-bit input: Primary clock.PWRDWN(1'b0), // 1-bit input: Power-down.RST(reset) // 1-bit input: Reset);// clk_800MHzlogic channel_rx_d1_r = 0, channel_rx_d2_r = 0, channel_rx_d3_r = 0;always_ff @(posedge clk_800MHz) beginchannel_rx_d3_r <= channel_rx_d2_r;channel_rx_d2_r <= channel_rx_d1_r;channel_rx_d1_r <= channel_rx;endlogic [31:0] cfg_datarate_i; logic cfg_datafresh_i; logic [31:0] cfg_datarate_r = 0; logic [31:0] cfg_datarate_sub1_r = 0; logic [31:0] cfg_datarate_sub2_r = 0; logic [31:0] cfg_datarate_m3d4_r = 0; logic [31:0] cfg_datarate_m1d4_r = 0; logic cfg_datafresh_r = 0; vio_0 vio_0_inst (.clk(clk_800MHz), // input wire clk.probe_out0(cfg_datafresh_i), // output wire [0 : 0] probe_out0.probe_out1(cfg_datarate_i) // output wire [31 : 0] probe_out1);logic startbit_detected_s;assign startbit_detected_s = channel_rx_d3_r & ~channel_rx_d2_r;ila_0 ila_uartio_inst (.clk(clk_800MHz), // input wire clk.probe0(channel_rx_d3_r), // input wire [0:0] probe0 .probe1(state_r), // input wire [7:0] probe1 .probe2(channel_tx) // input wire [0:0] probe2);enum logic[5:0] {RESET ,IDLE ,GET_STARTBIT ,GET_DATA ,GET_PARITY ,GET_STOPBIT } state_r, state_s;logic [2:0] rx_getdata_cnt_r;logic [7:0] rx_data_r;logic rx_valid_r;logic rx_error_flag_s;logic parity_error_flag_r;logic undetect_error_flag_r;logic nostop_error_flag_r;assign rx_error_flag_s = parity_error_flag_r | undetect_error_flag_r | nostop_error_flag_r;always_ff @(posedge clk_800MHz) beginif (reset)state_r <= RESET;elsestate_r <= state_s;endlogic next_state_flag_r;logic capture_value_r;always_comb begincase (state_r)RESET: state_s = IDLE;IDLE: beginif (startbit_detected_s)state_s = GET_STARTBIT;elsestate_s = IDLE;endGET_STARTBIT: beginif (next_state_flag_r) beginif (~capture_value_r)state_s = GET_DATA;elsestate_s = IDLE;end else beginstate_s = GET_STARTBIT;endendGET_DATA: beginif (next_state_flag_r && rx_getdata_cnt_r == 0) state_s = GET_PARITY;elsestate_s = GET_DATA;endGET_PARITY: beginif (next_state_flag_r)state_s = GET_STOPBIT;elsestate_s = GET_PARITY;endGET_STOPBIT: beginif (next_state_flag_r)if (startbit_detected_s)state_s = GET_STARTBIT;elsestate_s = IDLE;elsestate_s = GET_STOPBIT;enddefault: state_s = IDLE;endcaseendlogic [31:0] capture_asserted_cnt_r = 'd0;logic [31:0] capture_total_cnt_r = 'd0;logic cnt_fresh_s;assign cnt_fresh_s = (capture_total_cnt_r == cfg_datarate_sub1_r) ? 1'b1 : 1'b0;always_ff @(posedge clk_800MHz) begincase (state_s)IDLE: begincapture_asserted_cnt_r <= 'd0;enddefault: beginif (cnt_fresh_s)capture_asserted_cnt_r <= 'd0;else if (channel_rx_d3_r)capture_asserted_cnt_r <= capture_asserted_cnt_r + 'd1;endendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)IDLE: begincapture_total_cnt_r <= 'd0;enddefault: beginif (cnt_fresh_s)capture_total_cnt_r <= 'd0;else capture_total_cnt_r <= capture_total_cnt_r + 'd1;endendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)RESET, IDLE: beginrx_valid_r <= 1'b0;end GET_STOPBIT: beginif (capture_total_cnt_r == cfg_datarate_sub1_r) beginrx_valid_r <= 1'b1;endendendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)RESET, IDLE: beginnostop_error_flag_r <= 1'b0;end GET_STOPBIT: beginif (capture_total_cnt_r == cfg_datarate_sub1_r) beginif (~capture_value_r) beginnostop_error_flag_r <= 1'b1;endendendendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)RESET, IDLE: beginundetect_error_flag_r <= 1'b0;end GET_STARTBIT, GET_DATA, GET_PARITY, GET_STOPBIT: beginif (capture_total_cnt_r == cfg_datarate_sub1_r) beginif (capture_asserted_cnt_r > cfg_datarate_m3d4_r) begin// undetect_error_flag_r <= 1'b0;end else if (capture_asserted_cnt_r < cfg_datarate_m1d4_r) begin// undetect_error_flag_r <= 1'b0;end else beginundetect_error_flag_r <= 1'b1;endendendendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)RESET: beginparity_error_flag_r <= 1'b0;endGET_PARITY: beginif (capture_total_cnt_r == cfg_datarate_sub1_r) beginif (capture_value_r == ^rx_data_r[7:0]) beginparity_error_flag_r <= 1'b0;end else beginparity_error_flag_r <= 1'b1;endendendendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)IDLE: beginnext_state_flag_r <= 1'b0;end default: beginif (capture_total_cnt_r == cfg_datarate_sub1_r) beginnext_state_flag_r <= 1'b1;end else if (capture_total_cnt_r == 0) beginnext_state_flag_r <= 1'b0;endendendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)IDLE: begincapture_value_r <= 1'b0;end default: beginif (capture_total_cnt_r == cfg_datarate_sub2_r) beginif (capture_asserted_cnt_r > cfg_datarate_m3d4_r) begincapture_value_r <= 1'b1;end else if (capture_asserted_cnt_r < cfg_datarate_m1d4_r) begincapture_value_r <= 1'b0;endendendendcaseendalways_ff @(posedge clk_800MHz) begincase (state_s)GET_DATA: beginif (capture_total_cnt_r == cfg_datarate_sub1_r) beginrx_getdata_cnt_r <= rx_getdata_cnt_r + 'd1;rx_data_r[rx_getdata_cnt_r] <= capture_value_r;endend default: beginrx_getdata_cnt_r <= 3'd0;endendcaseendila_0 ila_0_inst (.clk(clk_800MHz), // input wire clk.probe0(rx_valid_r), // input wire [0:0] probe0 .probe1(rx_data_r), // input wire [7:0] probe1 .probe2(rx_error_flag_s) // input wire [0:0] probe2);串口发送模块的代码如下,它将收到的未检测出错误的数据转发给主机。
enum logic [5:0] {TX_RESET ,TX_IDLE ,TX_SEND_STARTBIT ,TX_SEND_DATABIT ,TX_SEND_PARITYBIT ,TX_SEND_STOPBIT} send_state_r, send_state_s;always_ff @(posedge clk_800MHz) beginif (reset) beginsend_state_r <= TX_RESET;end else beginsend_state_r <= send_state_s;endendlogic send_nextstate_r;logic [2:0] tx_senddata_cnt_r;logic [7:0] tx_data_r;logic tx_valid_r;always_comb begincase (send_state_r)TX_RESET: send_state_s = TX_IDLE;TX_IDLE: beginif (tx_valid_r) send_state_s = TX_SEND_STARTBIT;elsesend_state_s = TX_IDLE;endTX_SEND_STARTBIT: beginif (send_nextstate_r) beginsend_state_s = TX_SEND_DATABIT;end else beginsend_state_s = TX_SEND_STARTBIT;endendTX_SEND_DATABIT: beginif (send_nextstate_r && tx_senddata_cnt_r == 3'd0) beginsend_state_s = TX_SEND_PARITYBIT;end else beginsend_state_s = TX_SEND_DATABIT;endendTX_SEND_PARITYBIT: beginif (send_nextstate_r) beginsend_state_s = TX_SEND_STOPBIT;end else beginsend_state_s = TX_SEND_PARITYBIT;endendTX_SEND_STOPBIT: beginif (send_nextstate_r) beginif (tx_valid_r) beginsend_state_s = TX_SEND_STARTBIT;end else beginsend_state_s = TX_IDLE;endend else beginsend_state_s = TX_SEND_STOPBIT;endenddefault: send_state_s = TX_RESET;endcaseendalways_ff @(posedge clk_800MHz) begincase (send_state_s)TX_IDLE, TX_SEND_STOPBIT: beginif (rx_valid_r & ~rx_error_flag_s) begintx_valid_r <= rx_valid_r;tx_data_r <= rx_data_r;end else if (~rx_valid_r & tx_valid_r) begintx_valid_r <= 1'b0;endendendcaseendalways_ff @(posedge clk_800MHz) begincase (send_state_s)TX_IDLE, TX_SEND_STOPBIT: beginif (~rx_valid_r) begincfg_datafresh_r <= cfg_datafresh_i;if (cfg_datafresh_i) begincfg_datarate_r <= cfg_datarate_i;cfg_datarate_sub1_r <= cfg_datarate_i - 1;cfg_datarate_sub2_r <= cfg_datarate_i - 2;cfg_datarate_m3d4_r <= (cfg_datarate_i >> 1) + (cfg_datarate_i >> 2);cfg_datarate_m1d4_r <= (cfg_datarate_i >> 2);endendendendcaseendlogic [31:0] sent_total_cnt_r;always_ff @(posedge clk_800MHz) begincase (send_state_s)default: beginif (sent_total_cnt_r == cfg_datarate_sub1_r) beginsend_nextstate_r <= 1'b1;end else beginsend_nextstate_r <= 1'b0;endendTX_IDLE: beginendendcaseendalways_ff @(posedge clk_800MHz) begincase (send_state_s)default: beginif (sent_total_cnt_r == cfg_datarate_sub1_r) beginsent_total_cnt_r <= 'd0;end else beginsent_total_cnt_r <= sent_total_cnt_r + 1;endendTX_IDLE: sent_total_cnt_r <= 'd0;endcaseendalways_ff @(posedge clk_800MHz) begincase (send_state_s)TX_RESET, TX_IDLE, TX_SEND_STOPBIT: channel_tx <= 1'b1;TX_SEND_STARTBIT: channel_tx <= 1'b0;TX_SEND_DATABIT: channel_tx <= tx_data_r[tx_senddata_cnt_r];TX_SEND_PARITYBIT: channel_tx <= ^tx_data_r[7:0];endcaseendalways_ff @(posedge clk_800MHz) begincase (send_state_s)TX_SEND_STARTBIT: begintx_senddata_cnt_r <= 3'd0;endTX_SEND_DATABIT: beginif (sent_total_cnt_r == cfg_datarate_sub1_r) begintx_senddata_cnt_r <= tx_senddata_cnt_r + 1;endendendcaseend
endmodule
约束文件实现(ft4232hl_uart.xdc)
对应约束文件如下:
set_property BOARD_PART_PIN default_100mhz_clk_p [get_ports default_clk_p]
set_property BOARD_PART_PIN default_100mhz_clk_n [get_ports default_clk_n]
set_property BOARD_PART_PIN CPU_RESET [get_ports reset]
set_property BOARD_PART_PIN USB_UART1_TX [get_ports channel_tx]
set_property BOARD_PART_PIN USB_UART1_RX [get_ports channel_rx]
set_property BOARD_PART_PIN USB_UART1_CTS [get_ports channel_cts]
set_property BOARD_PART_PIN USB_UART1_RTS [get_ports channel_rts]# auto generate
set_property IOSTANDARD DIFF_SSTL12 [get_ports default_clk_p]
set_property IOSTANDARD DIFF_SSTL12 [get_ports default_clk_n]
set_property PACKAGE_PIN BH51 [get_ports default_clk_p]
set_property PACKAGE_PIN BJ51 [get_ports default_clk_n]
set_property IOSTANDARD LVCMOS12 [get_ports reset]
set_property PACKAGE_PIN BM29 [get_ports reset]
set_property IOSTANDARD LVCMOS18 [get_ports channel_tx]
set_property PACKAGE_PIN BN26 [get_ports channel_tx]
set_property IOSTANDARD LVCMOS18 [get_ports channel_rx]
set_property PACKAGE_PIN BP26 [get_ports channel_rx]# STA constraint
create_clock -period 10.000 -waveform {0.000 5.000} [get_ports default_clk_p]
create_generated_clock -source [get_ports default_clk_p] -divide_by 1 [get_pins IBUFDS_inst/O]
# create_clock -period 2.500 -waveform {0.000 1.250} [get_pins MMCME4_BASE_inst/CLKOUT0]set_property C_CLK_INPUT_FREQ_HZ 300000000 [get_debug_cores dbg_hub]
set_property C_ENABLE_CLK_DIVIDER false [get_debug_cores dbg_hub]
set_property C_USER_SCAN_CHAIN 1 [get_debug_cores dbg_hub]
connect_debug_port dbg_hub/clk [get_nets clk_800MHz_BUFG]
仿真文件实现(ft4232hl_uart_tb.sv)
`timescale 1ns / 1ps
//
// Company:
// Engineer: wjh776a68
//
// Create Date: 03/15/2024 10:35:44 PM
// Design Name:
// Module Name: ft4232hl_uart_tb
// Project Name:
// Target Devices: XCVU37P
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//module ft4232hl_uart_tb();bit clk_100MHz ;logic reset ;bit channel_rx= 1'b0;logic channel_tx ;always #5 clk_100MHz = ~clk_100MHz;ft4232hl_uart ft4232hl_uart_inst(.default_clk_p (clk_100MHz),.default_clk_n (~clk_100MHz),.reset (reset ),.channel_rx (channel_rx),.channel_tx (channel_tx));initial beginft4232hl_uart_inst.cfg_datafresh_i <= 1'b0;ft4232hl_uart_inst.cfg_datarate_i <= 0;@(posedge ft4232hl_uart_inst.mmcm_locked_s);ft4232hl_uart_inst.cfg_datafresh_i <= 1'b1;ft4232hl_uart_inst.cfg_datarate_i <= 217;@(posedge clk_100MHz);ft4232hl_uart_inst.cfg_datafresh_i <= 1'b0;ft4232hl_uart_inst.cfg_datarate_i <= 0;endbit clk_1_8432MHz ;bit [2:0] cnt;always #(500 / 1.8432) clk_1_8432MHz = ~clk_1_8432MHz;initial beginreset = 1'b1;@(posedge clk_1_8432MHz);reset <= 1'b0;endenum logic [3:0] {IDLE = 4'd0 ,START_BIT = 4'd1 ,DATA_BIT = 4'd2 ,PARITY_BIT = 4'd3 ,STOP_BIT = 4'd4 } state_r, state_s;always_ff @(posedge clk_1_8432MHz) beginif (reset) beginstate_r <= IDLE;end else beginstate_r <= state_s;endendlogic [4:0] idle_cnt;always_comb begincase (state_r)IDLE: beginif (idle_cnt == 20) beginstate_s = START_BIT;end else beginstate_s = IDLE;endendSTART_BIT: state_s = DATA_BIT;DATA_BIT: beginif (cnt == 0)state_s = PARITY_BIT;elsestate_s = DATA_BIT;endPARITY_BIT: state_s = STOP_BIT;STOP_BIT: beginstate_s = START_BIT;// state_s = IDLE;endendcaseendlogic [7:0] data_tosend = 8'h35;always_ff @(posedge clk_1_8432MHz) begincase (state_s)IDLE: channel_rx <= 1'b1;START_BIT: begincnt <= 'd0;channel_rx <= 1'b0;endDATA_BIT: begincnt <= cnt + 1;channel_rx <= data_tosend[cnt];endPARITY_BIT: beginchannel_rx <= ^data_tosend[7:0];endSTOP_BIT: beginchannel_rx <= 1'b1;endendcaseendalways_ff @(posedge clk_1_8432MHz) begincase (state_s)IDLE: idle_cnt <= idle_cnt + 1;default: idle_cnt <= 0;endcaseendendmodule
实机测试
由于是未来科技制造的芯片,需要使用来自未来科技编写的VCP驱动程序将一个USB设备拓展为4个串口设备,方能进行串口通信。
官方提供了多平台的驱动程序,然而其中仅Windows驱动存在近期更新,故本文串口通信测试在Windows虚拟机上进行。

参考链接:
- 串口通讯UART/RS232/RS485/RS-422笔记
- 俺也学不会FPGA的博客