【Pytorch深度学习开发实践学习】B站刘二大人课程笔记整理lecture11 Advanced_CNN
代码:
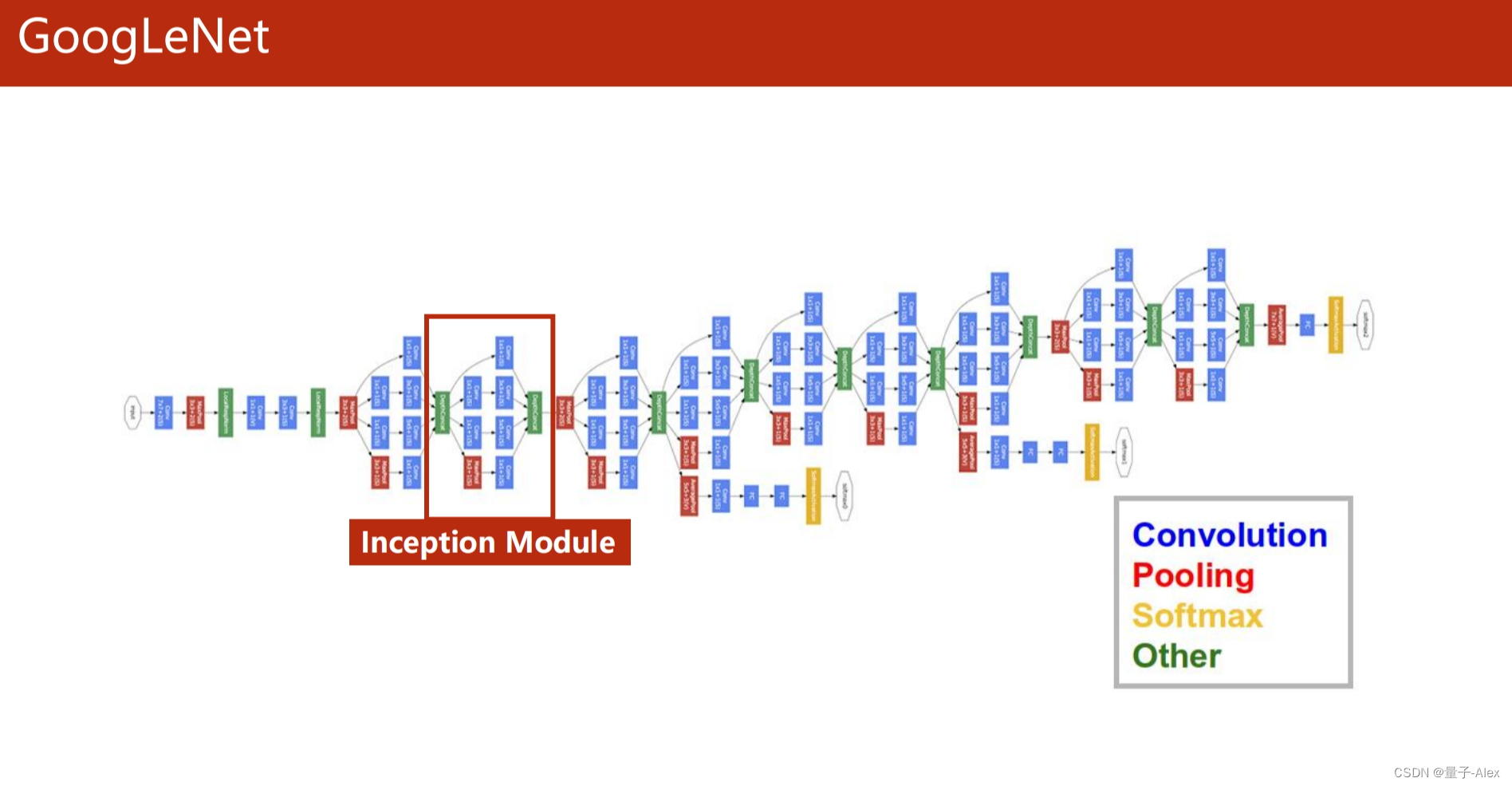
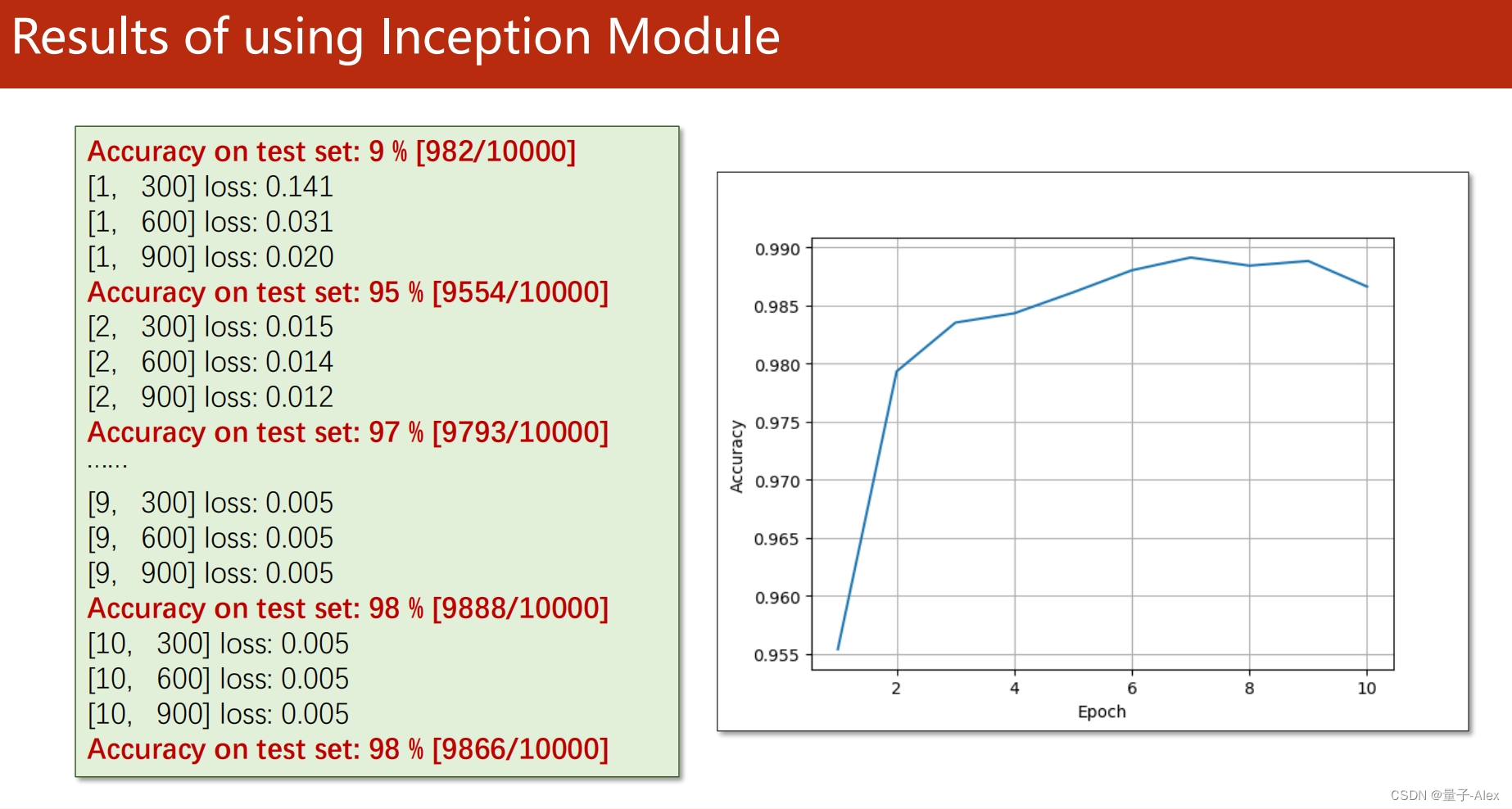
Pytorch实现GoogleNet
import torch
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import torch.nn as nn
import torch.nn.functional as Fbatch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]) #把原始图像转为tensor 这是均值和方差train_set = datasets.MNIST(root='./data/mnist', train=True, download=True, transform=transform)
train_loader = DataLoader(train_set, batch_size=batch_size, shuffle=True)test_set = datasets.MNIST(root='./data/mnist', train=False, download=True, transform=transform)
test_loader = DataLoader(test_set, batch_size=batch_size, shuffle=True)
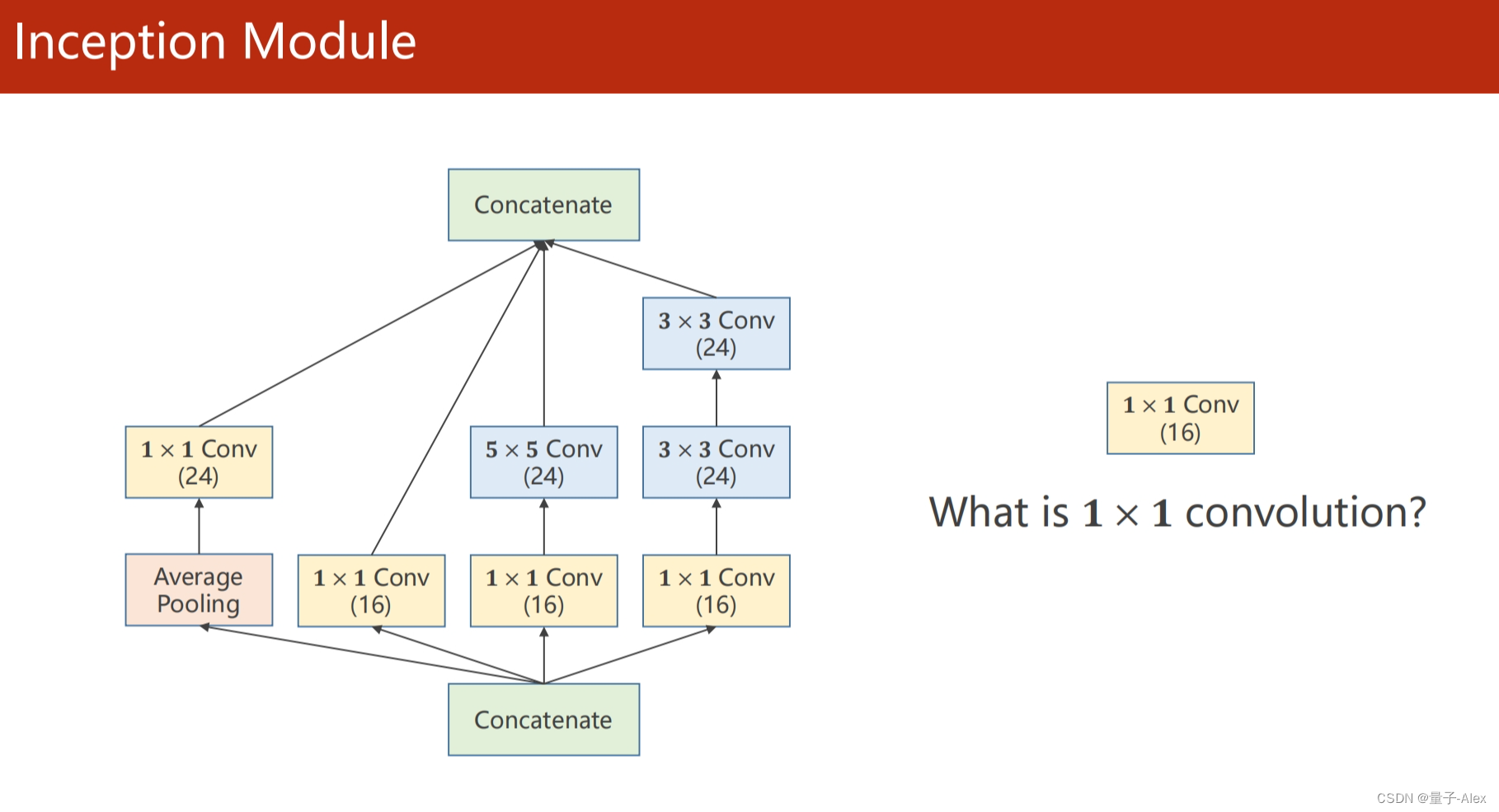
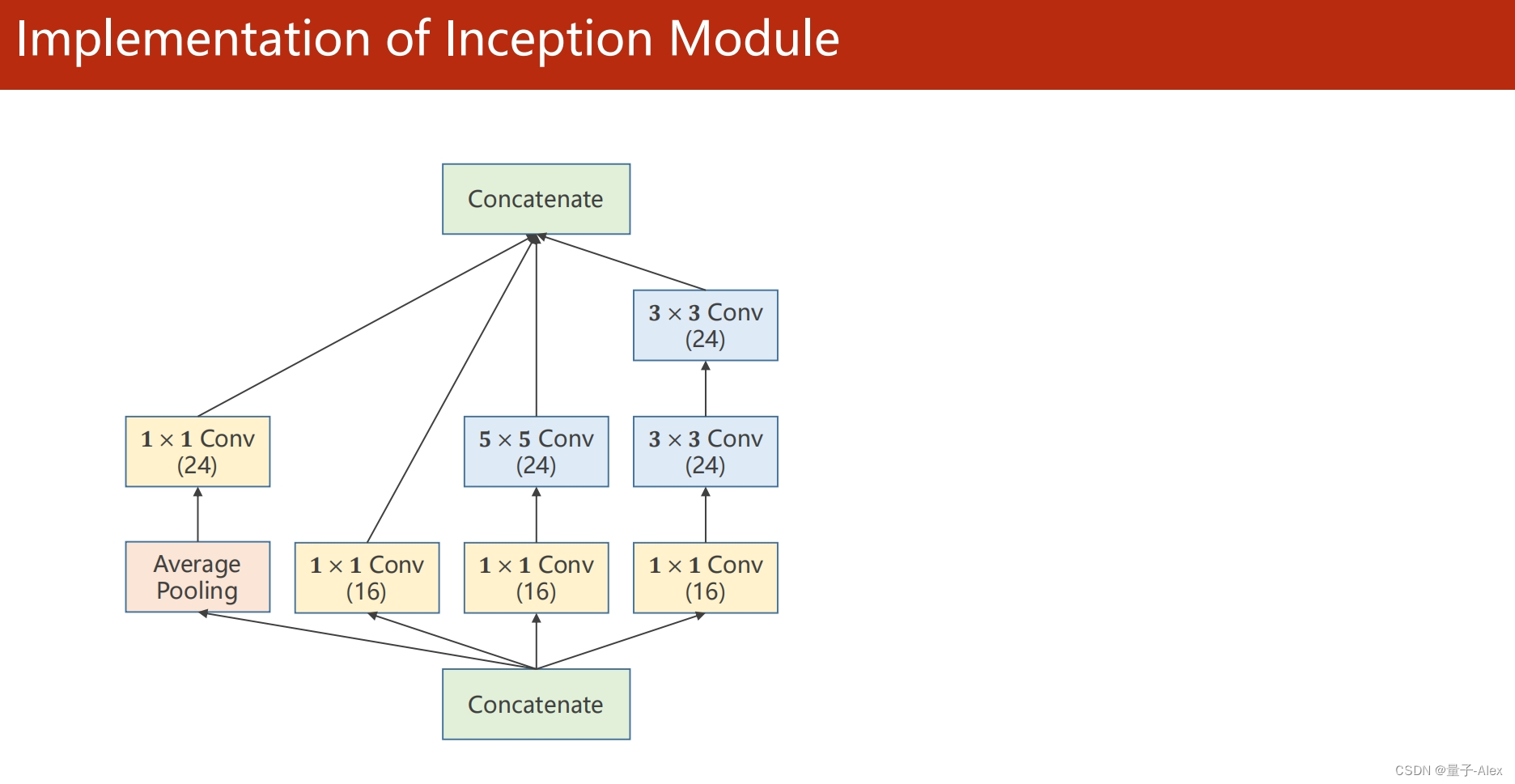
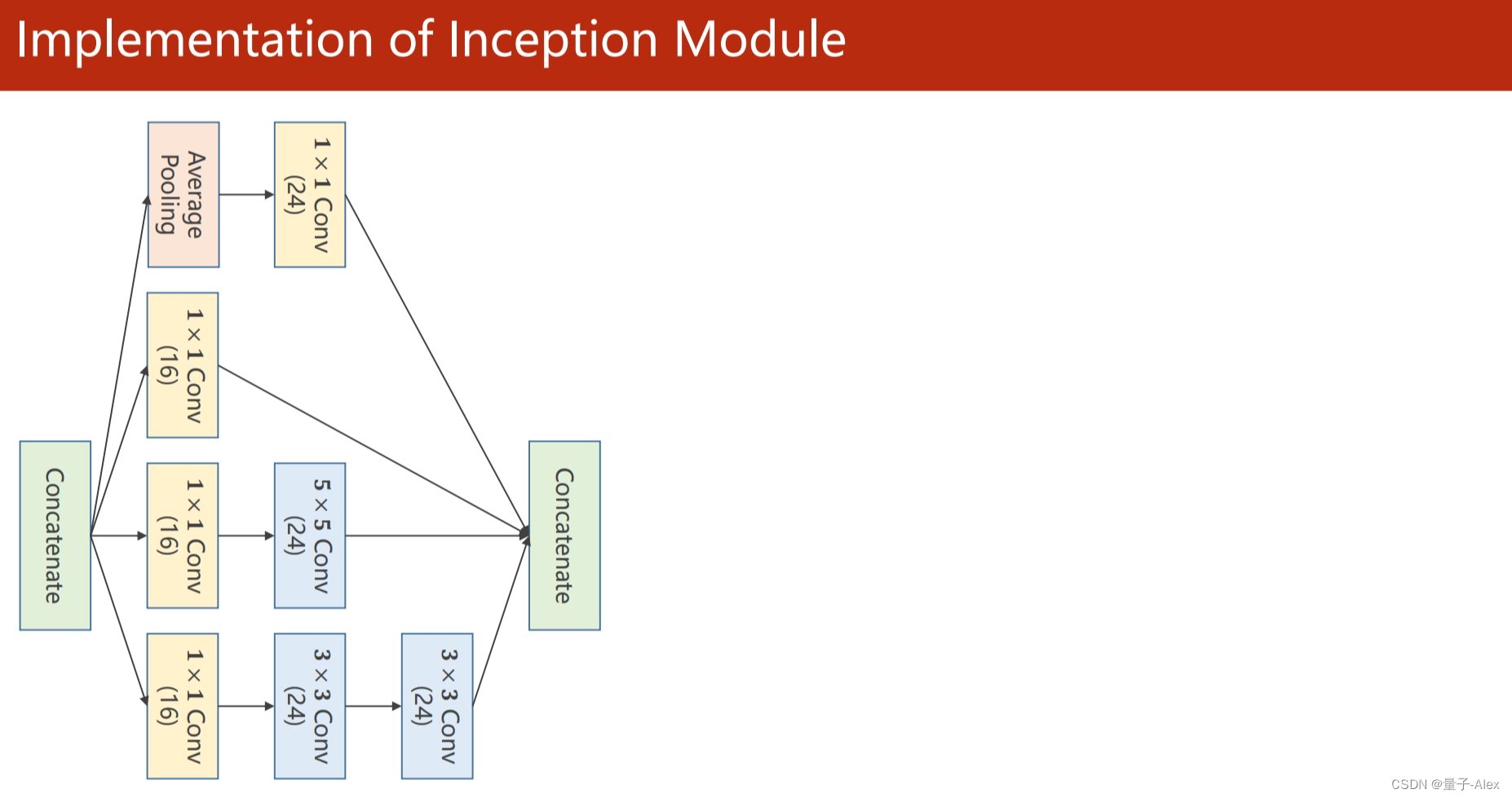
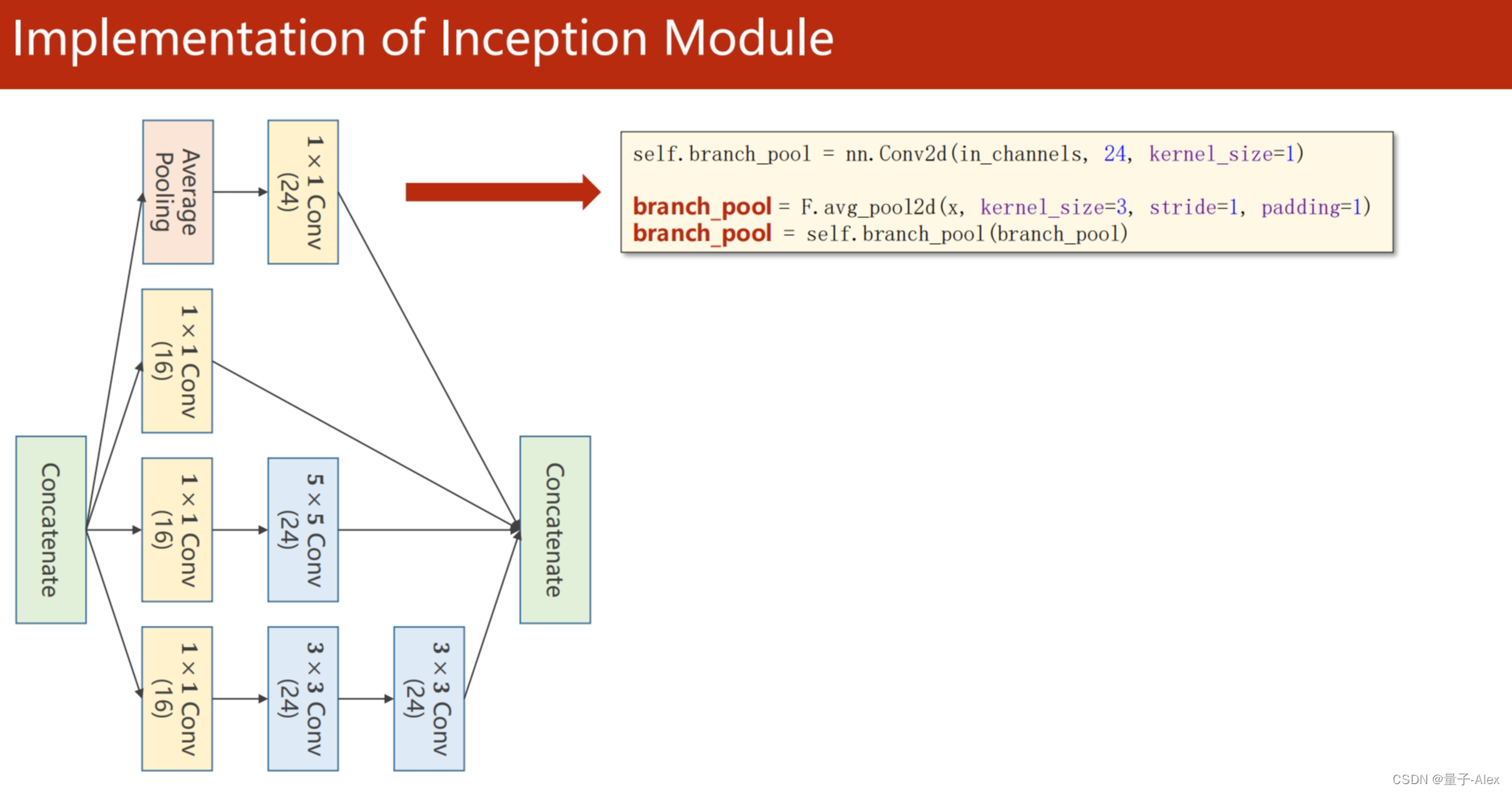
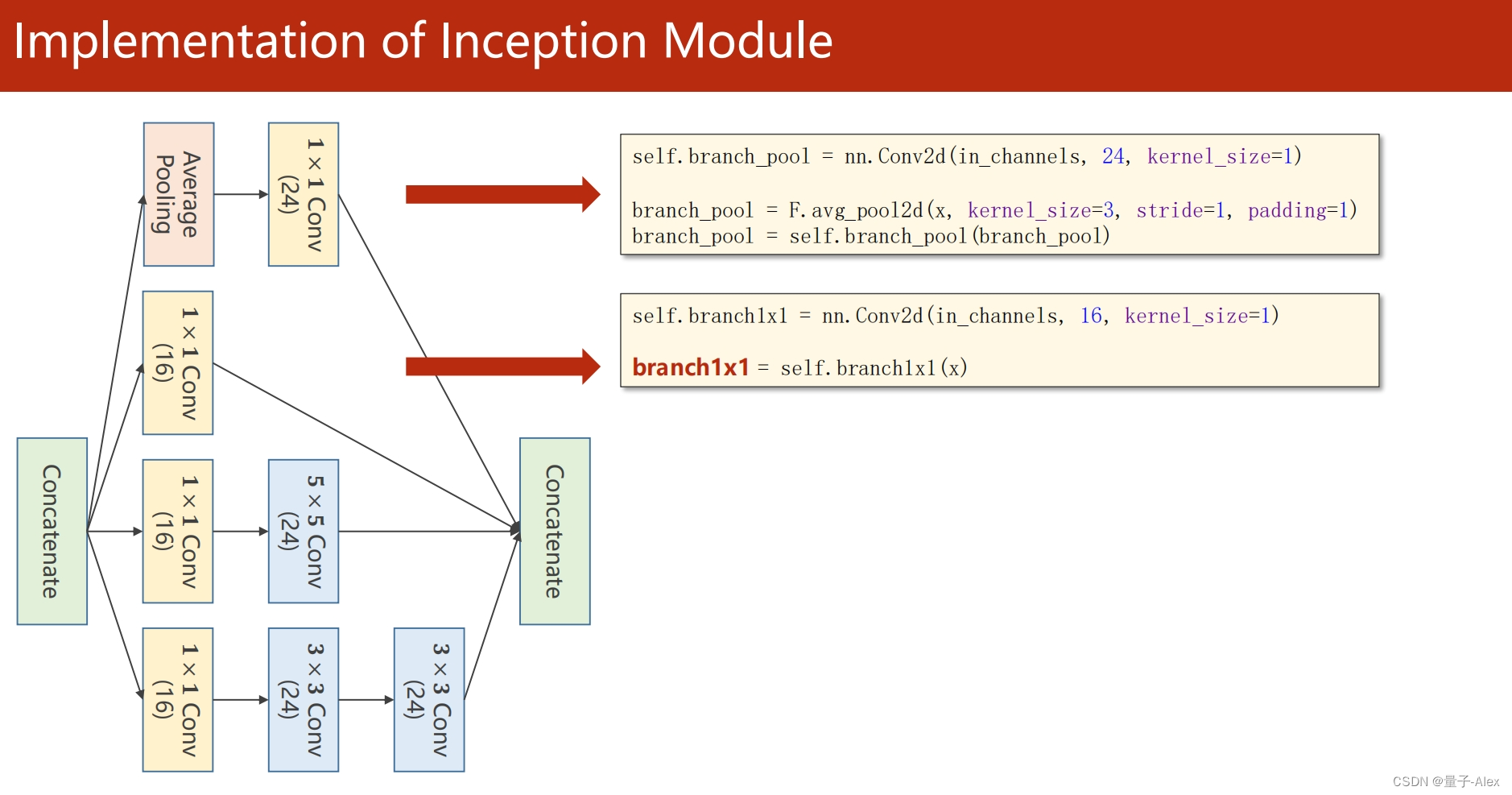
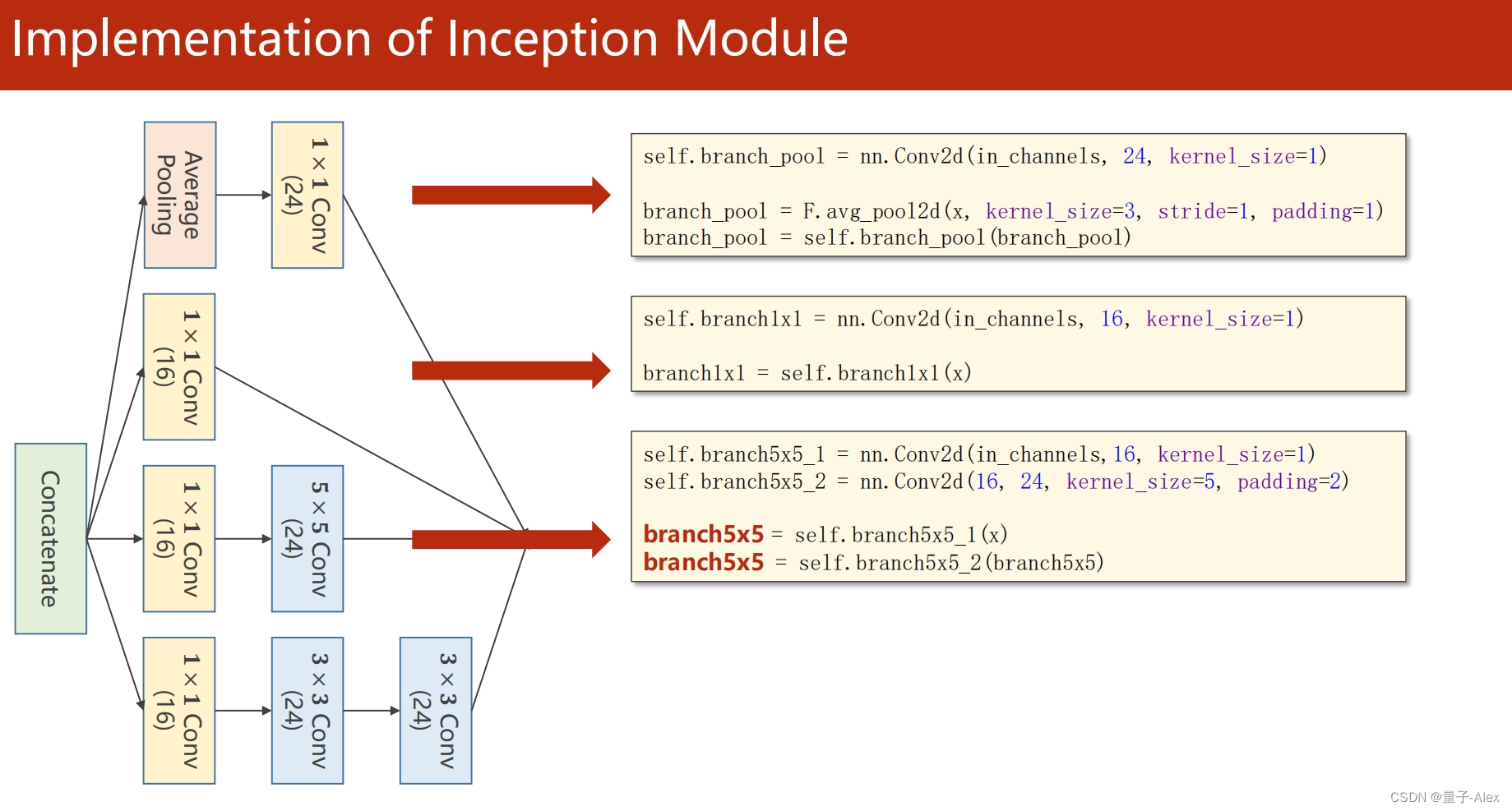
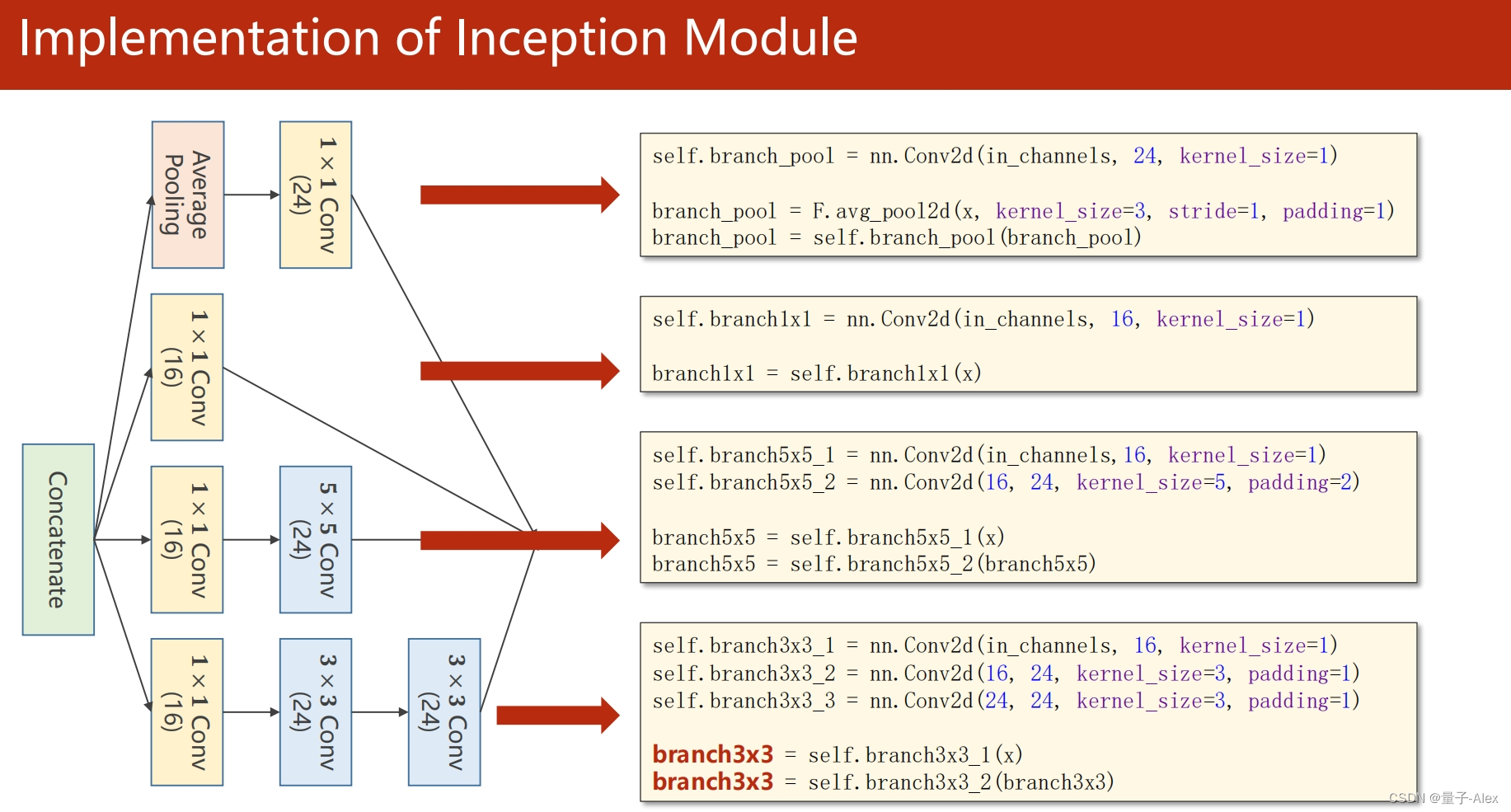
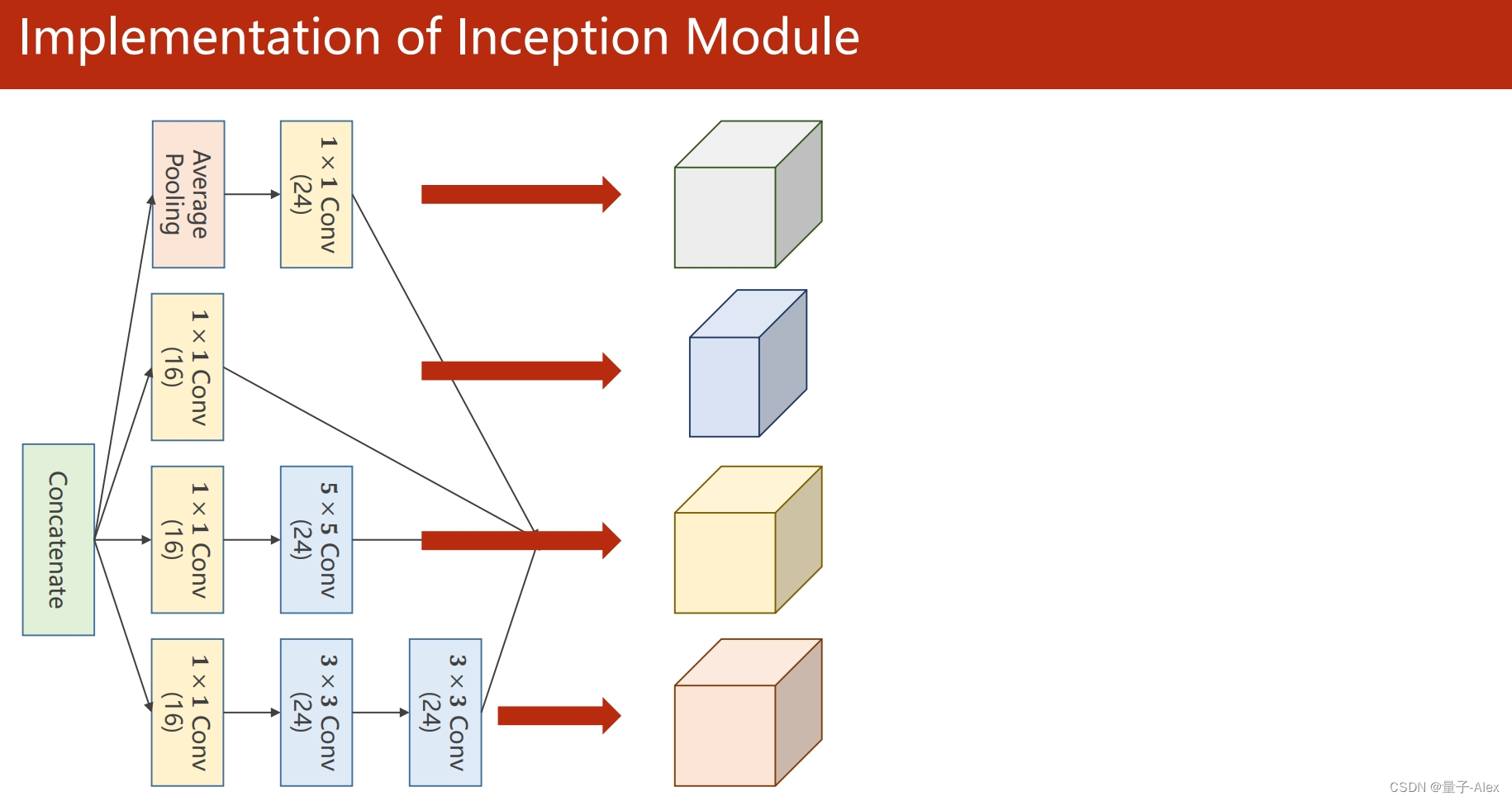
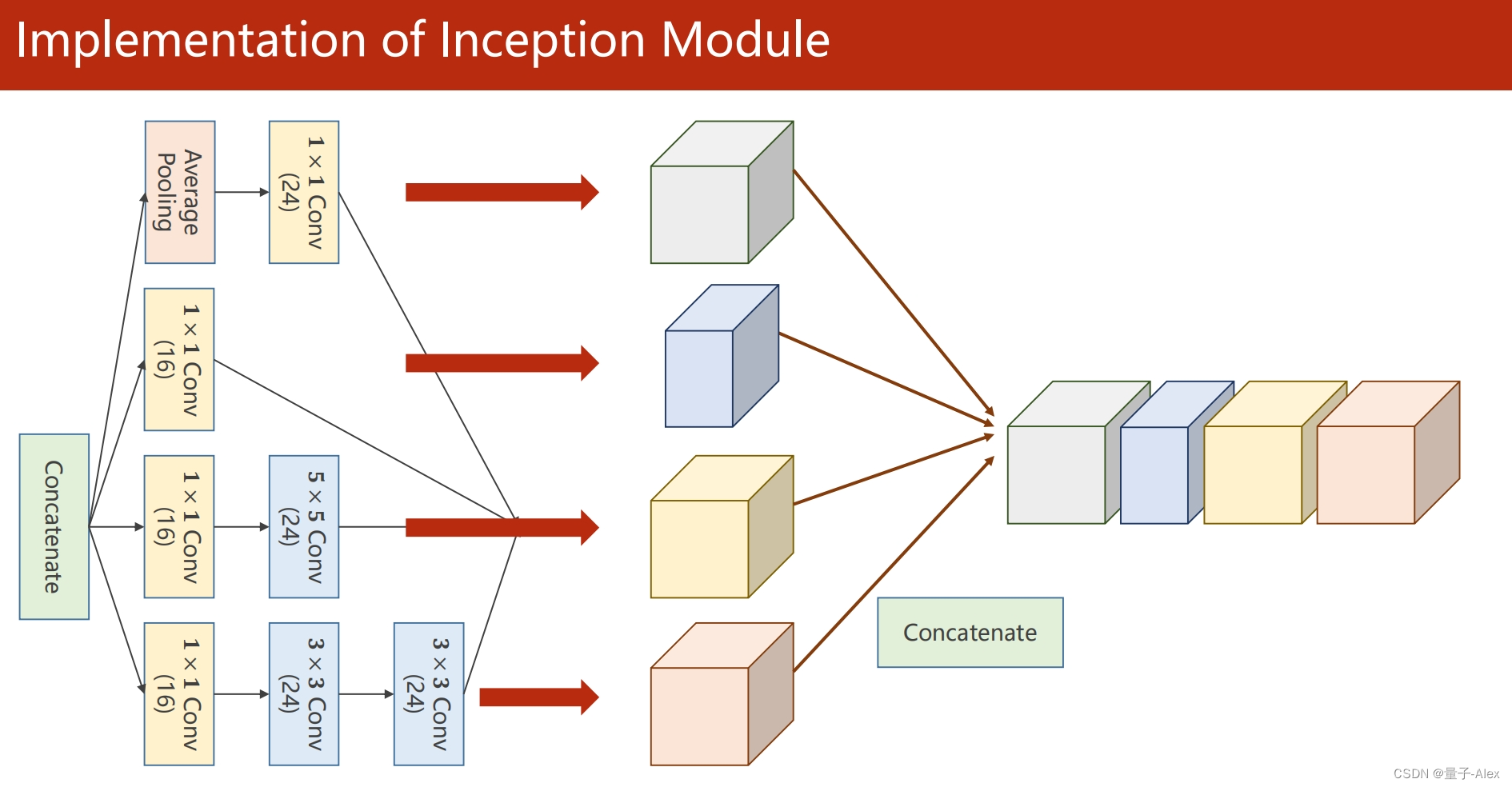
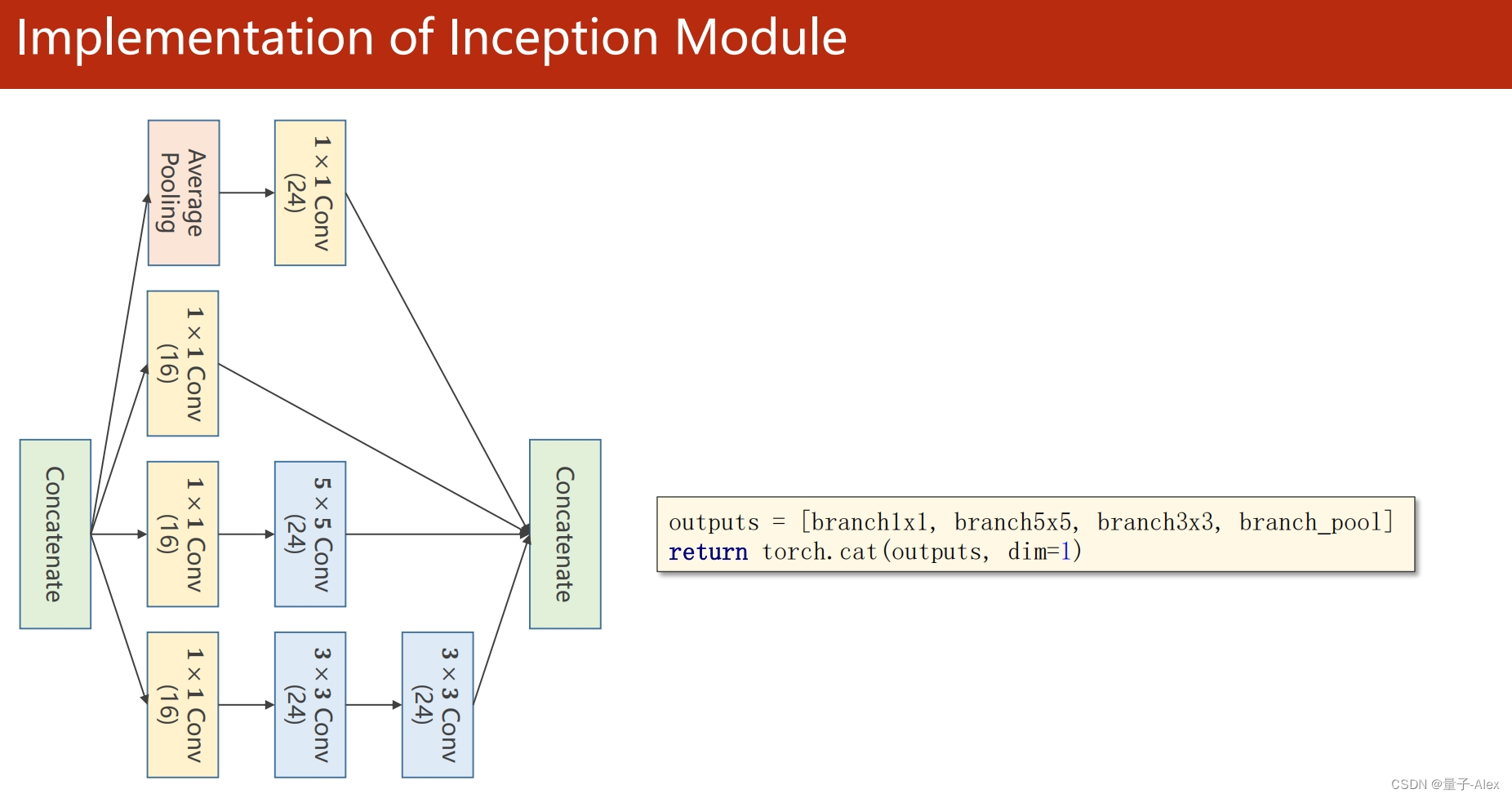
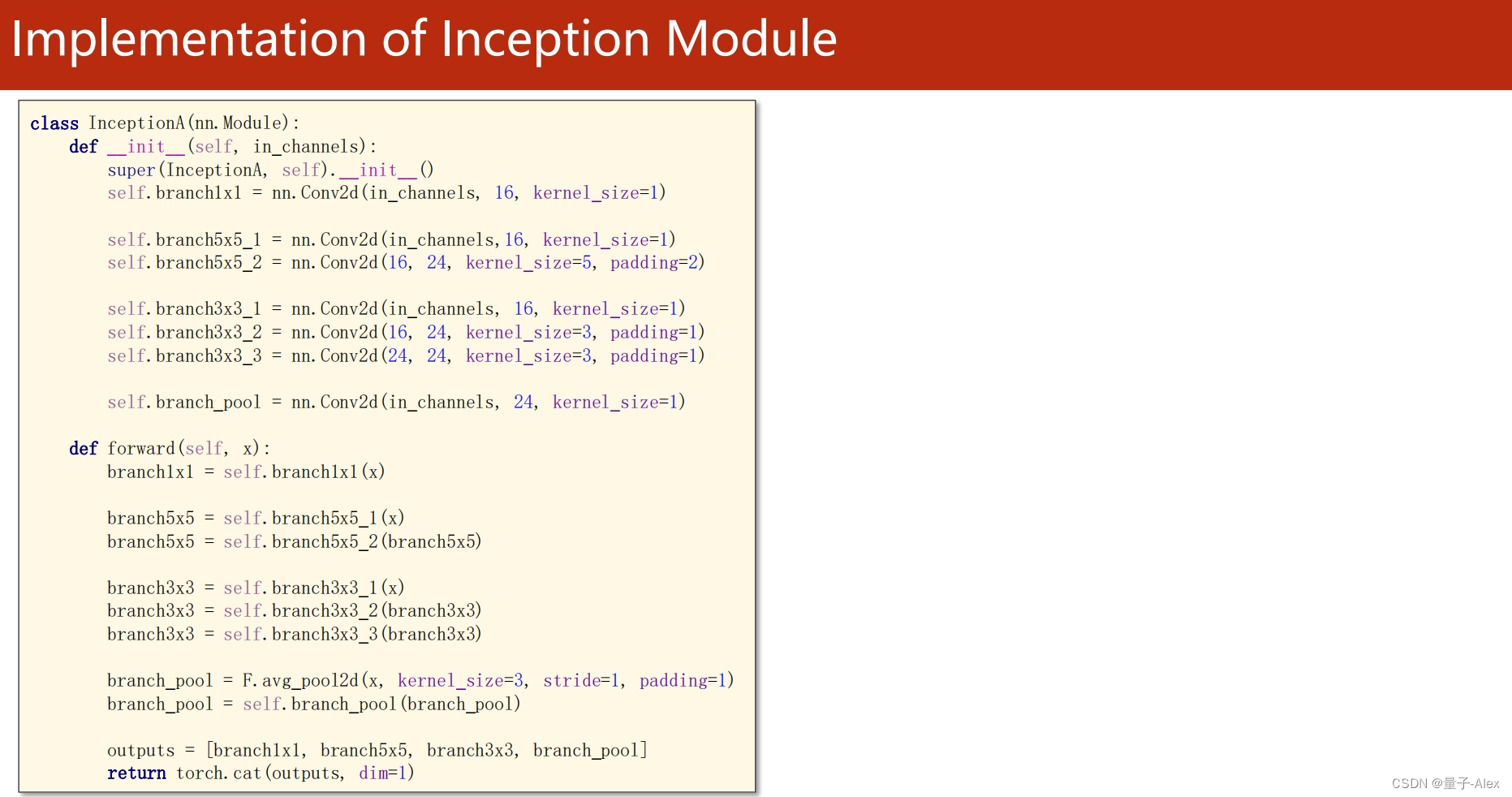
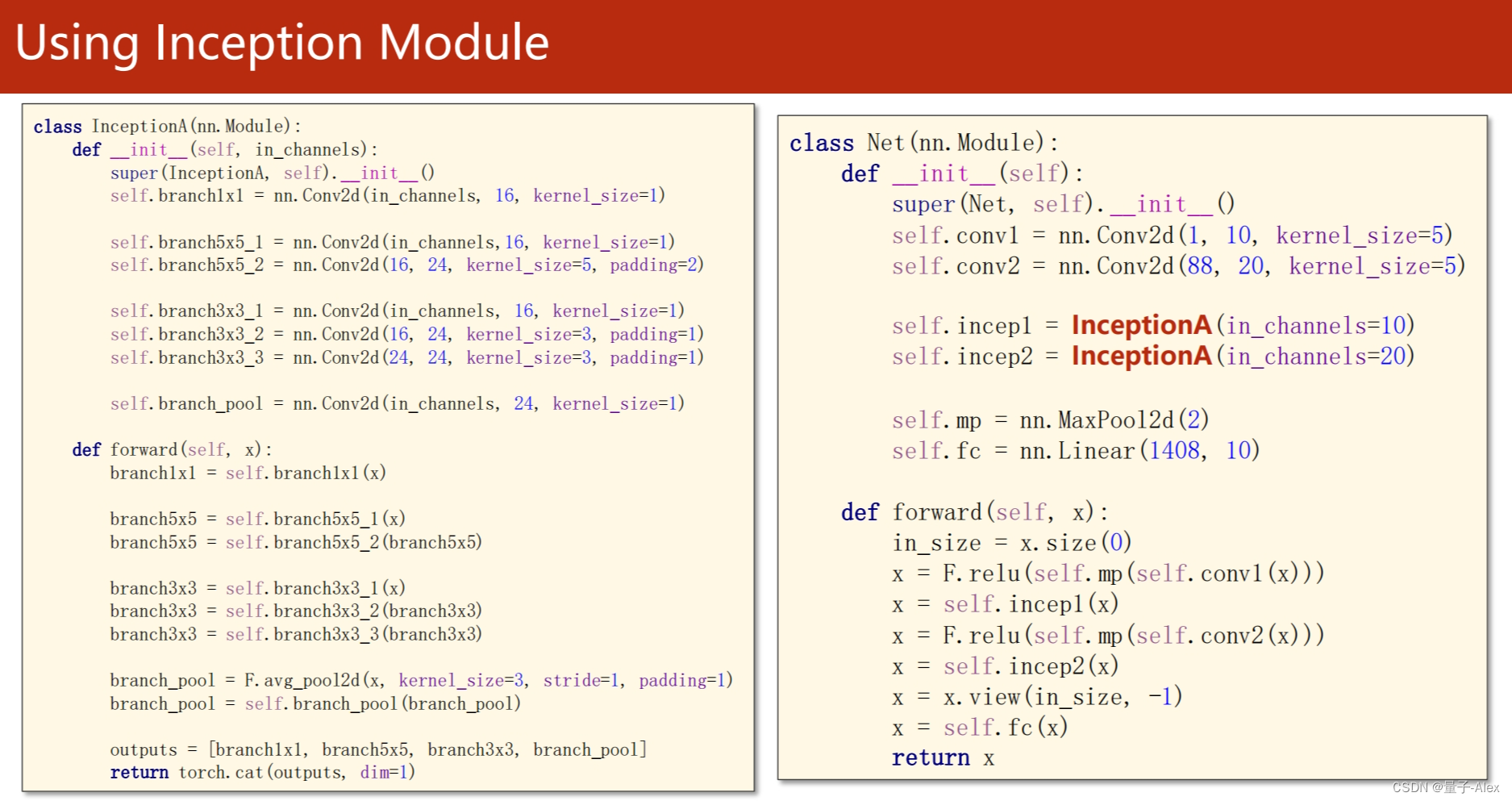
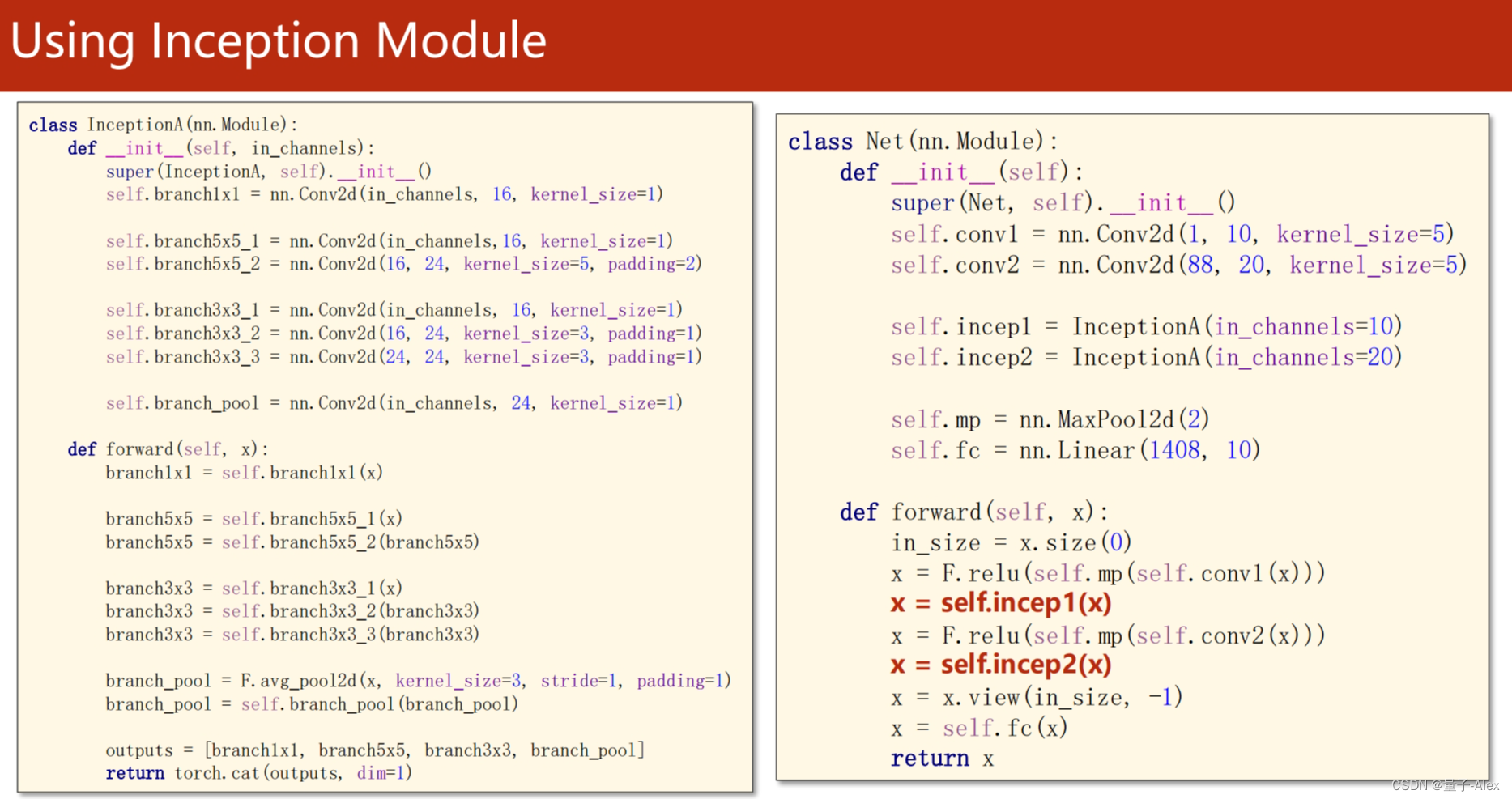
class Inception(torch.nn.Module):def __init__(self,in_channels):super(Inception, self).__init__()self.branchpool = nn.Conv2d(in_channels, 24, kernel_size=1)self.branch1x1 = nn.Conv2d(in_channels, 16, kernel_size=1)self.branch5x5_1 = nn.Conv2d(in_channels, 16, kernel_size=1)self.branch5x5_2 = nn.Conv2d(16, 24, kernel_size=5,padding=2)self.branch3x3_1 = nn.Conv2d(in_channels, 16, kernel_size=1)self.branch3x3_2 = nn.Conv2d(16, 24,kernel_size=3,padding=1)self.branch3x3_3 = nn.Conv2d(24, 24, kernel_size=3,padding=1)def forward(self, x):branch1x1 = self.branch1x1(x)branch5x5 = self.branch5x5_1(x)branch5x5 = self.branch5x5_2(branch5x5)branch3x3 = self.branch3x3_1(x)branch3x3 = self.branch3x3_2(branch3x3)branch3x3 = self.branch3x3_3(branch3x3)branchpool = F.avg_pool2d(x, kernel_size=3,stride=1,padding=1)branchpool = self.branchpool(branchpool)outputs = torch.cat((branch1x1,branch5x5,branch3x3,branchpool),dim=1)return outputsclass Net(torch.nn.Module):def __init__(self):super(Net,self).__init__()self.conv1 = nn.Conv2d(1, 10, kernel_size=5)self.conv2 = nn.Conv2d(88, 20, kernel_size=5)self.incep1 = Inception(10)self.incep2 = Inception(20)self.fc = nn.Linear(1408, 10)self.maxpool = nn.MaxPool2d(kernel_size=2)def forward(self, x):in_size = x.size(0)x = F.relu(self.maxpool(self.conv1(x)))x = self.incep1(x)x =F.relu(self.maxpool(self.conv2(x)))x = self.incep2(x)x = x.view(in_size, -1)x = self.fc(x)return xmodel = Net()
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') #把模型迁移到GPU
model = model.to(device) #把模型迁移到GPUdef train(epoch):running_loss = 0.0for i, data in enumerate(train_loader, 0):inputs, labels = datainputs,labels = inputs.to(device), labels.to(device) #训练内容迁移到GPU上optimizer.zero_grad()outputs = model(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()running_loss += loss.item()if i % 300 == 299: # print every 300 mini-batchesprint('[%d, %5d] loss: %.3f' %(epoch + 1, i + 1, running_loss / 300))running_loss = 0.0def test(epoch):correct = 0total = 0with torch.no_grad():for data in test_loader:images, labels = dataimages,labels = images.to(device), labels.to(device) #测试内容迁移到GPU上outputs = model(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()print('Accuracy of the network on the 10000 test images: %d %%' % (100 * correct / total))if __name__ == '__main__':for epoch in range(100):train(epoch)if epoch % 10 == 0:test(epoch)
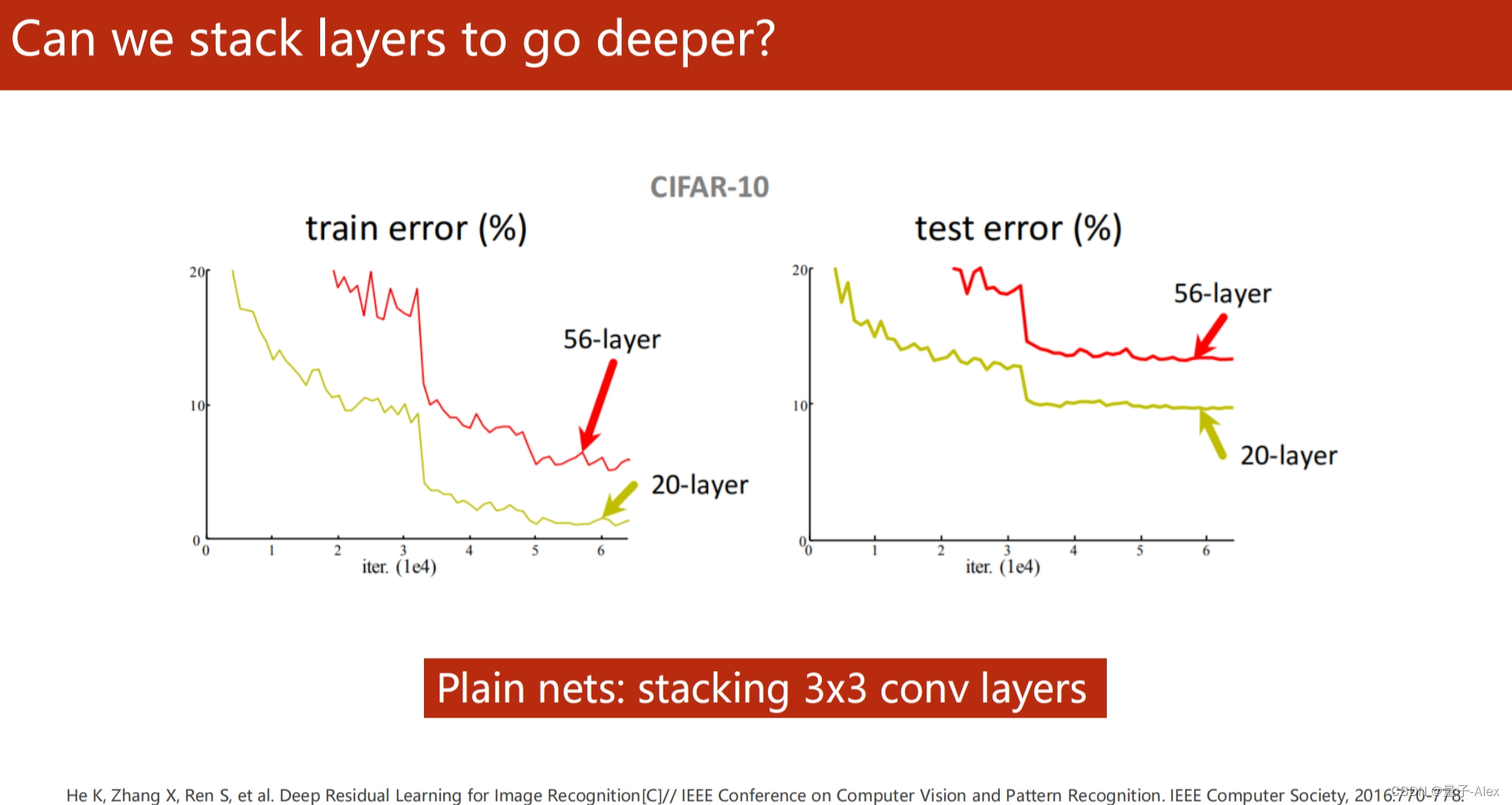
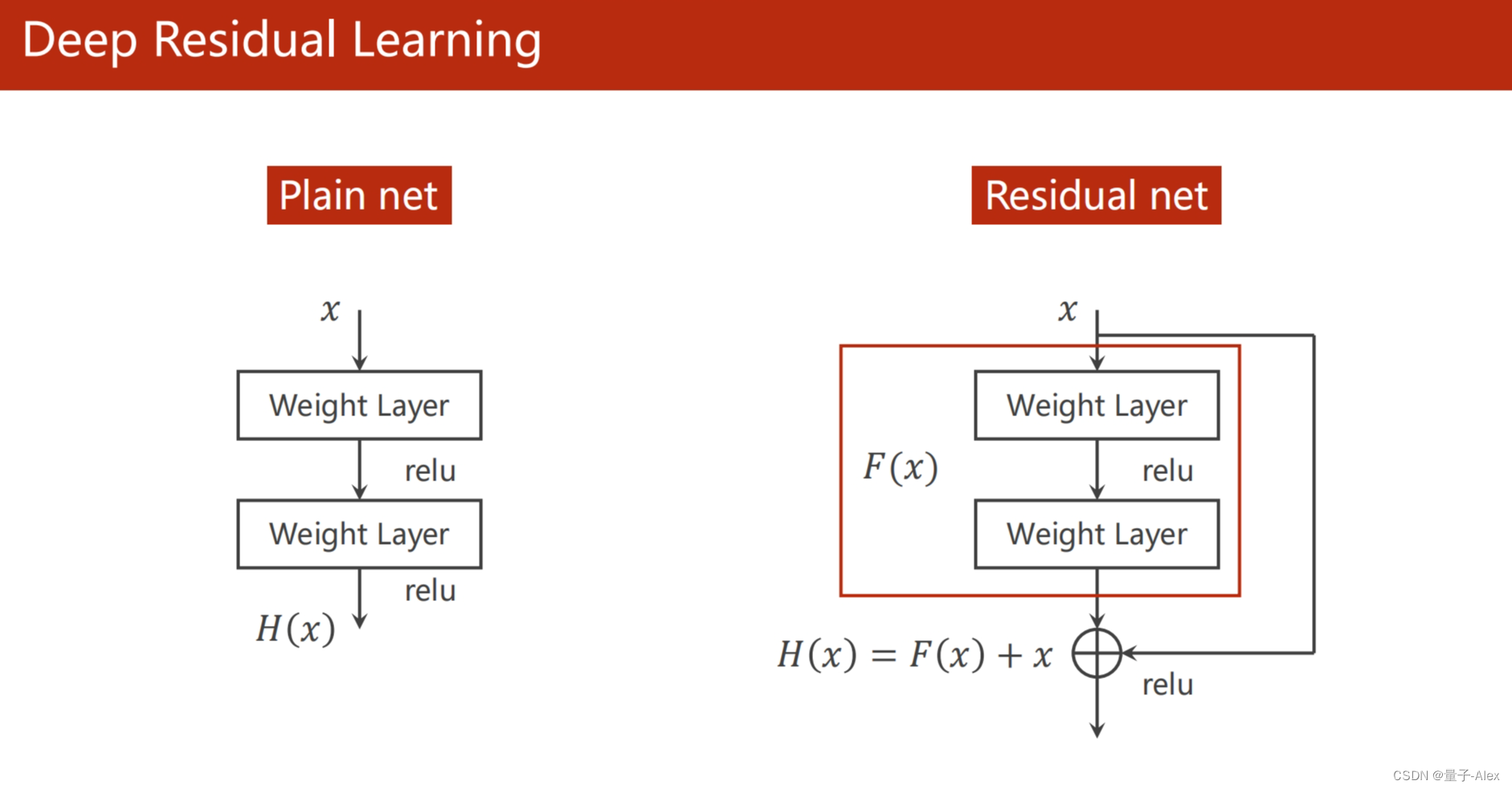
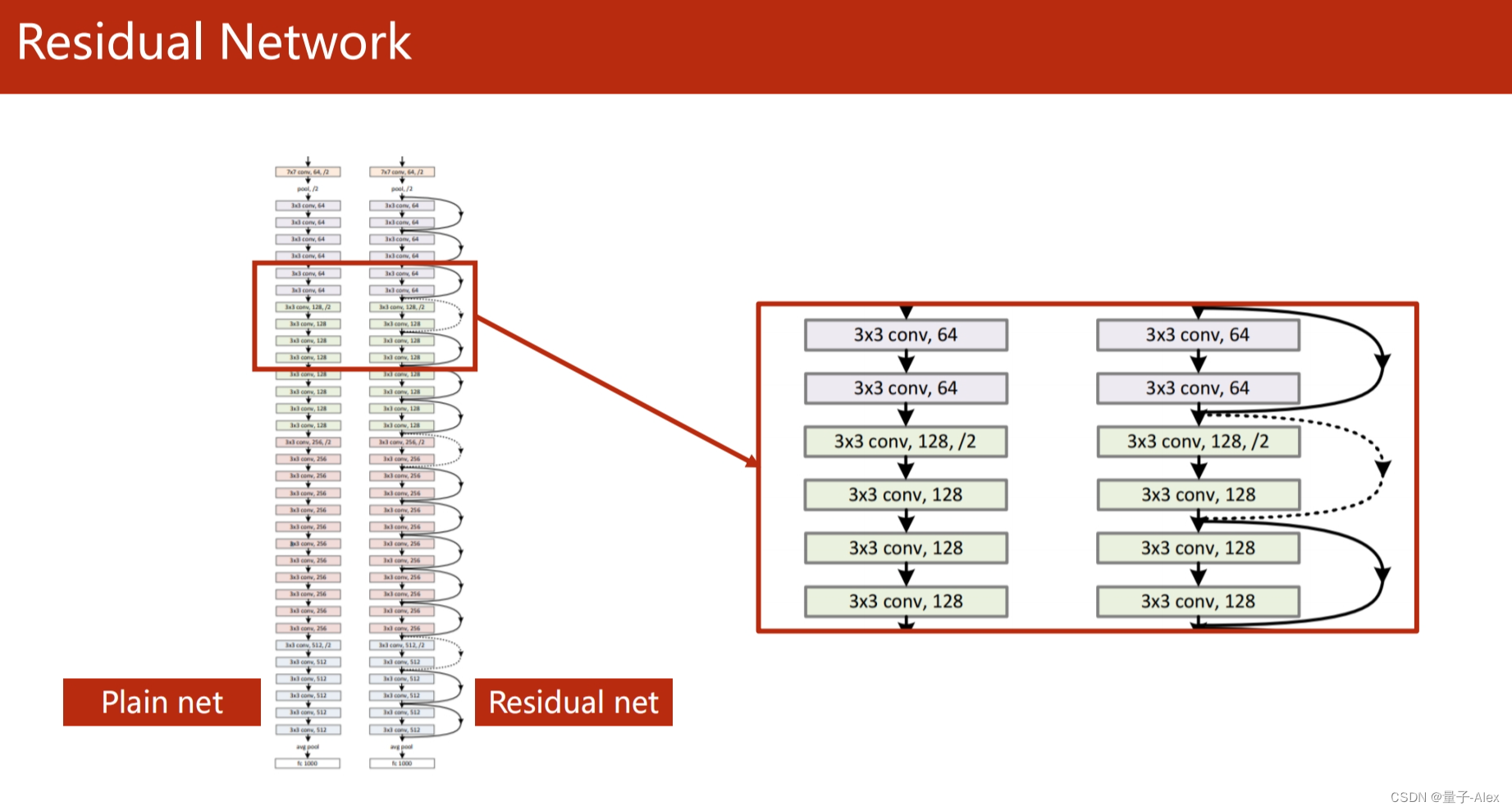
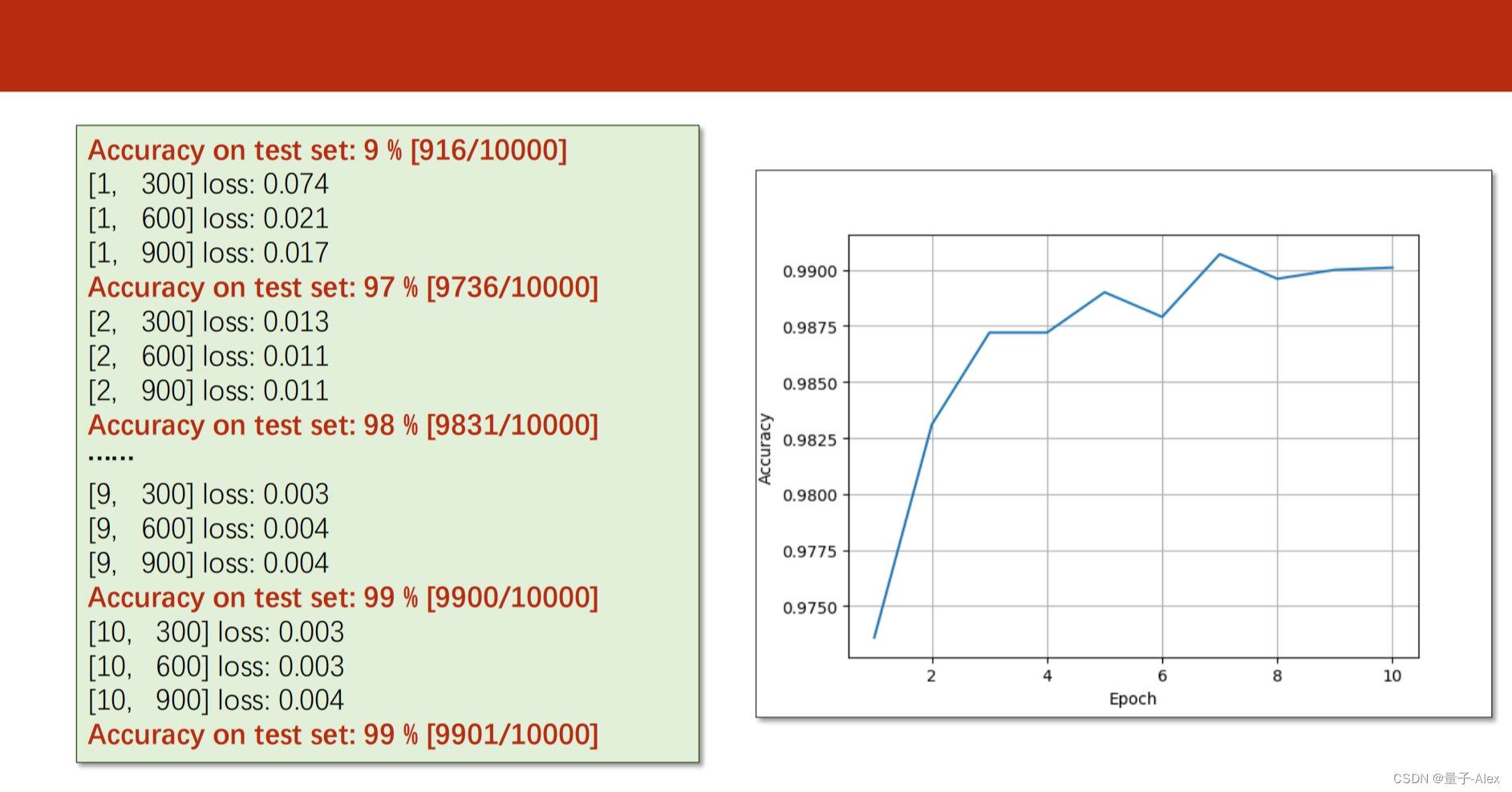
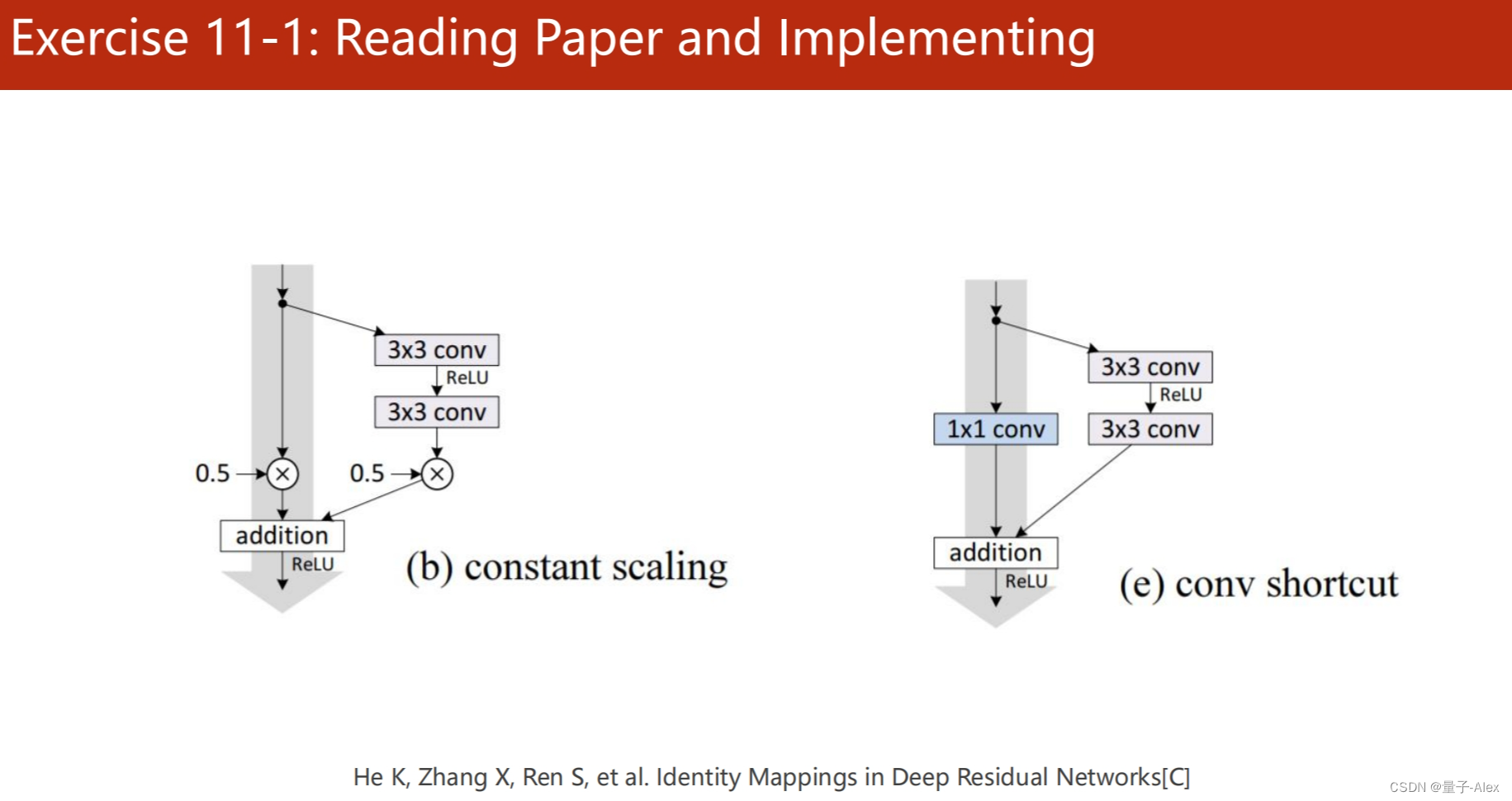
Pytorch实现ResNet
import torch
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import torch.nn as nn
import torch.nn.functional as Fbatch_size = 64
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]) #把原始图像转为tensor 这是均值和方差train_set = datasets.MNIST(root='./data/mnist', train=True, download=True, transform=transform)
train_loader = DataLoader(train_set, batch_size=batch_size, shuffle=True)test_set = datasets.MNIST(root='./data/mnist', train=False, download=True, transform=transform)
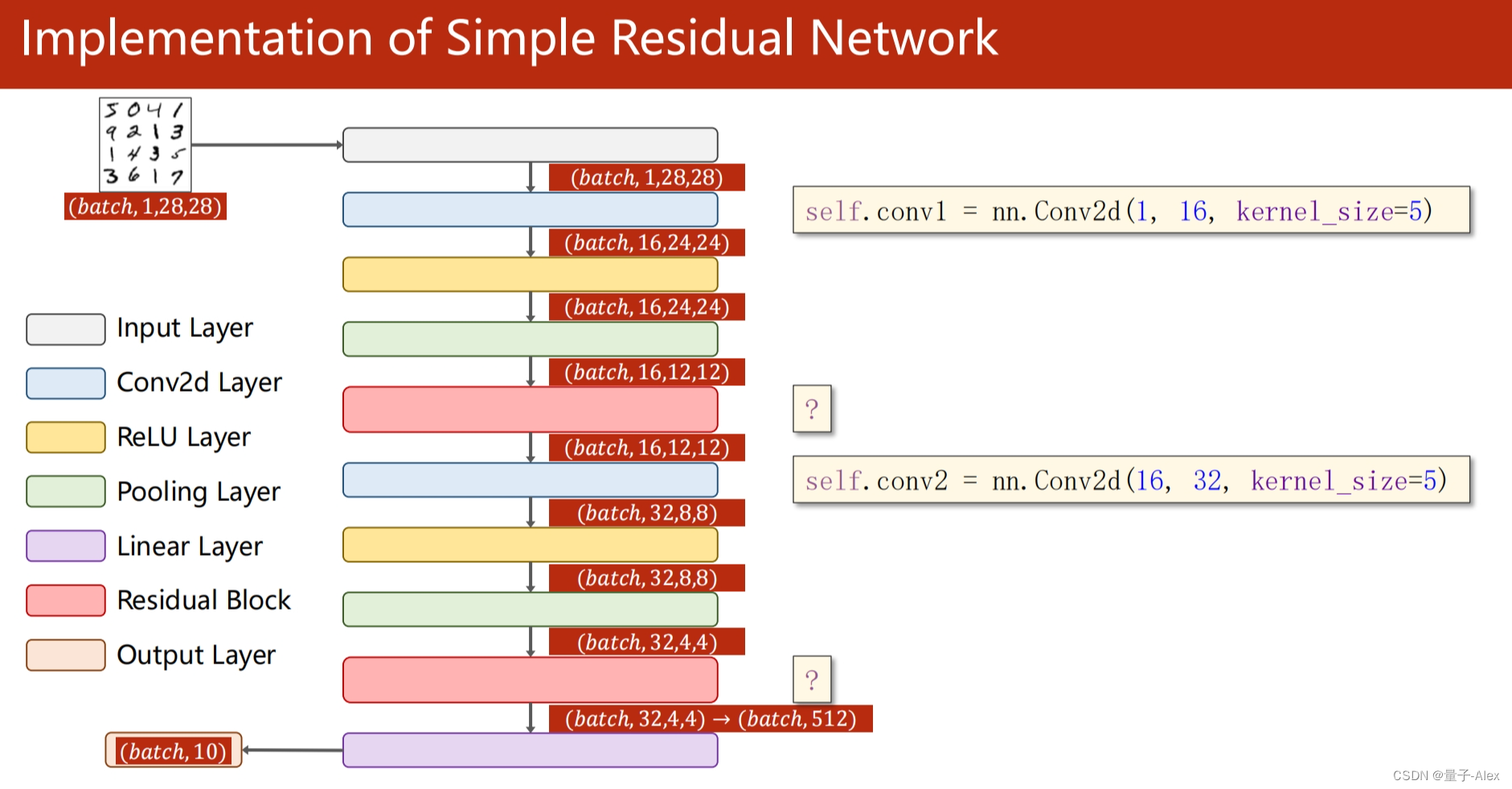
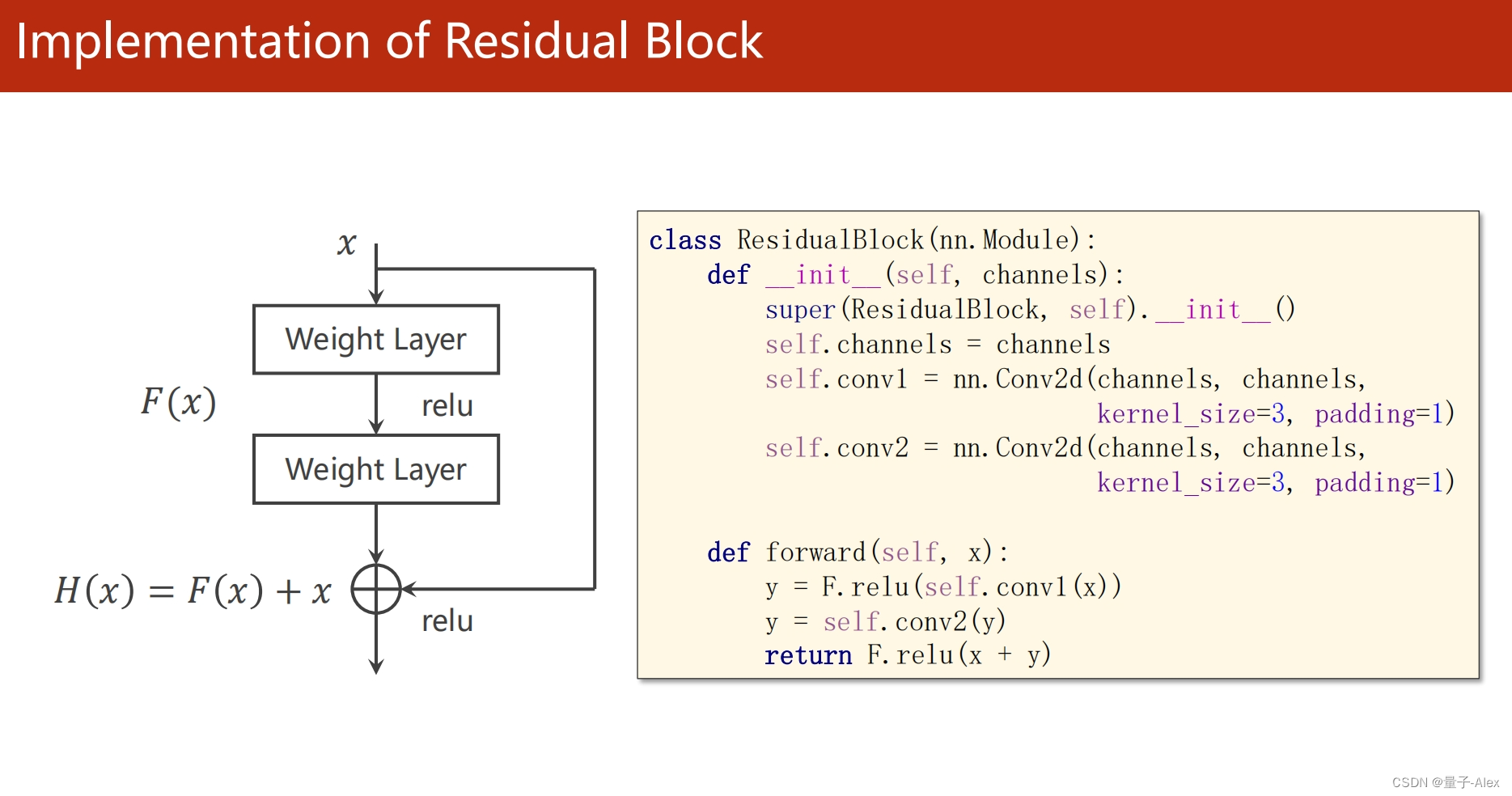
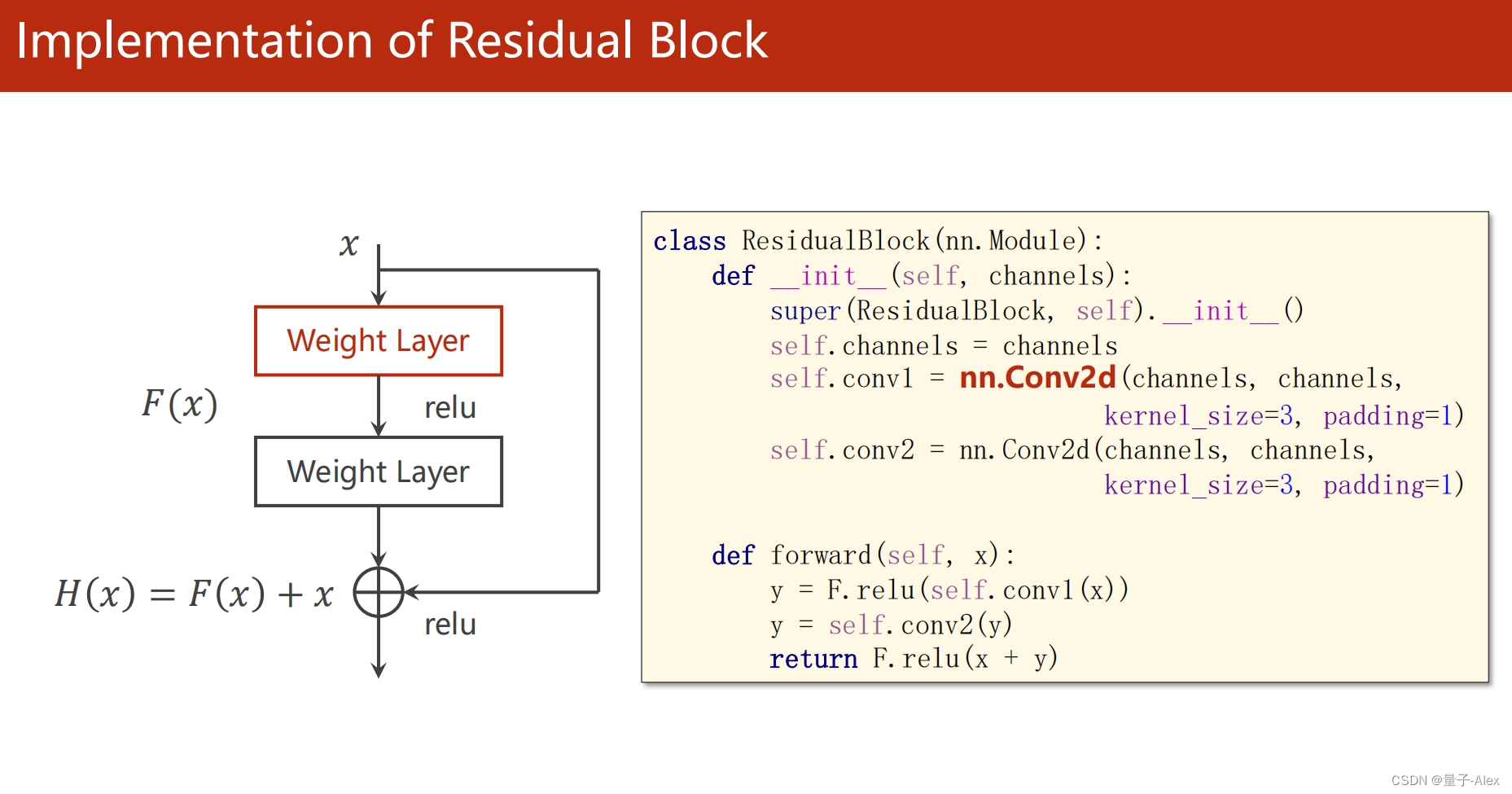
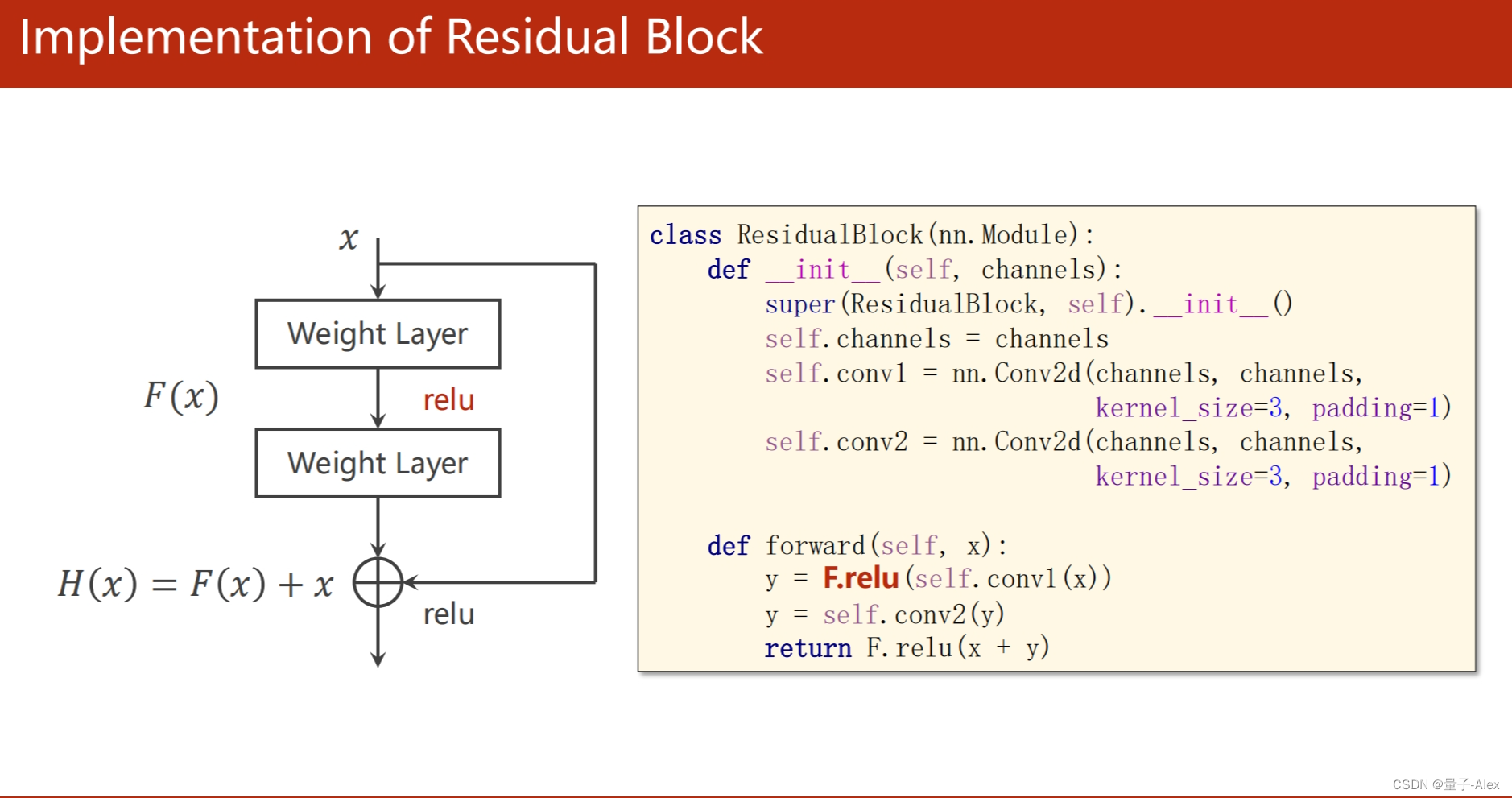
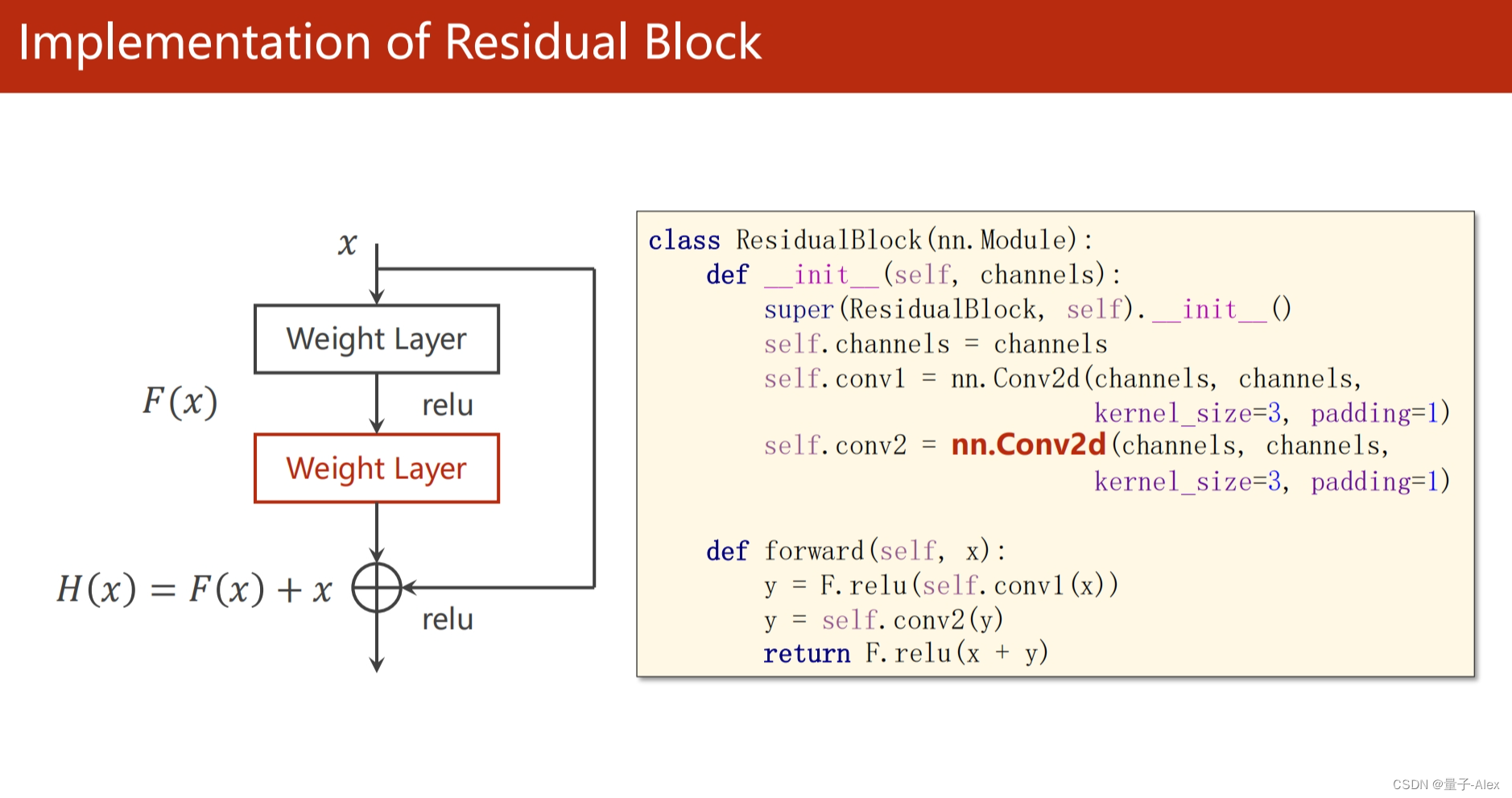
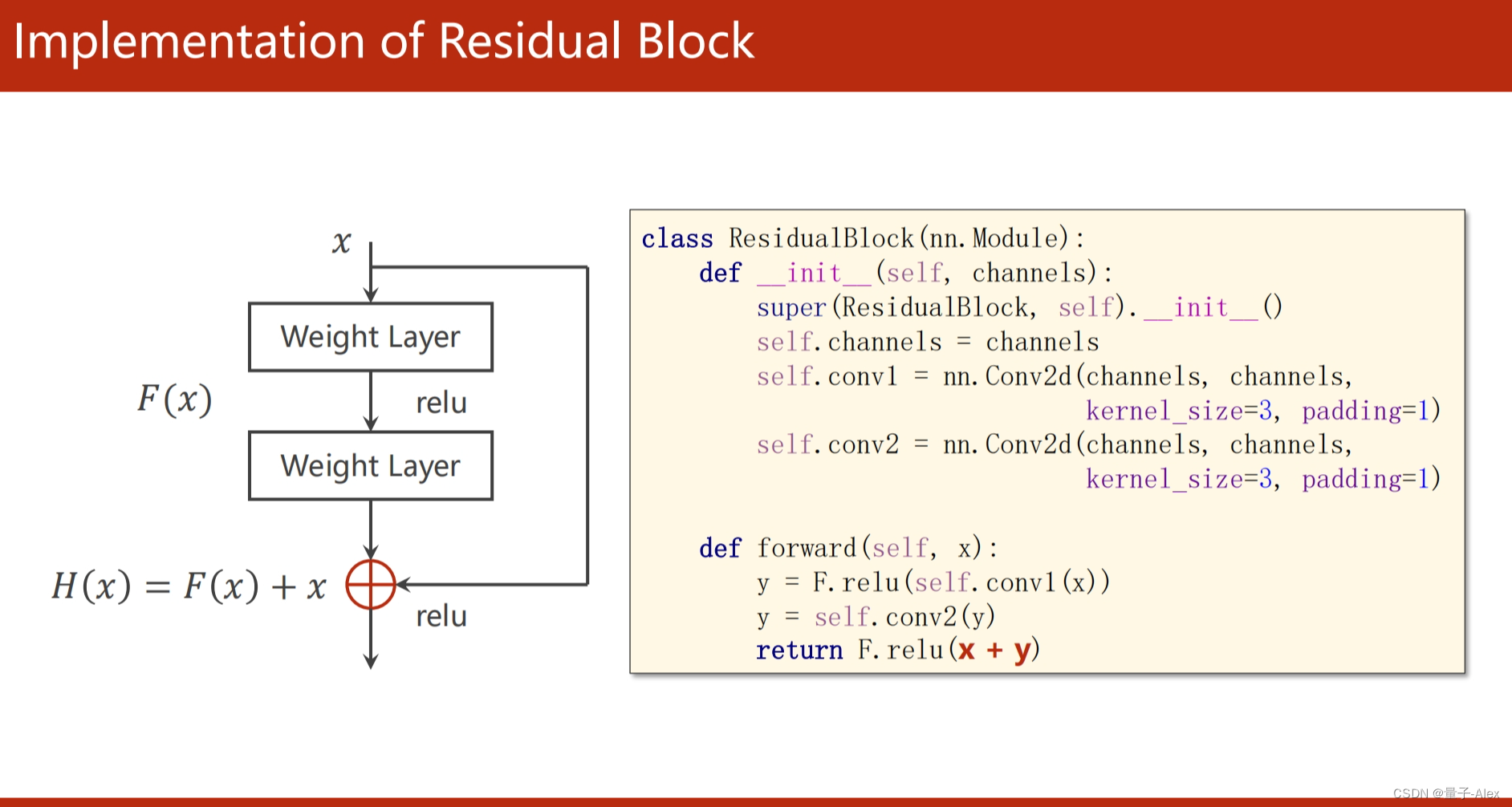
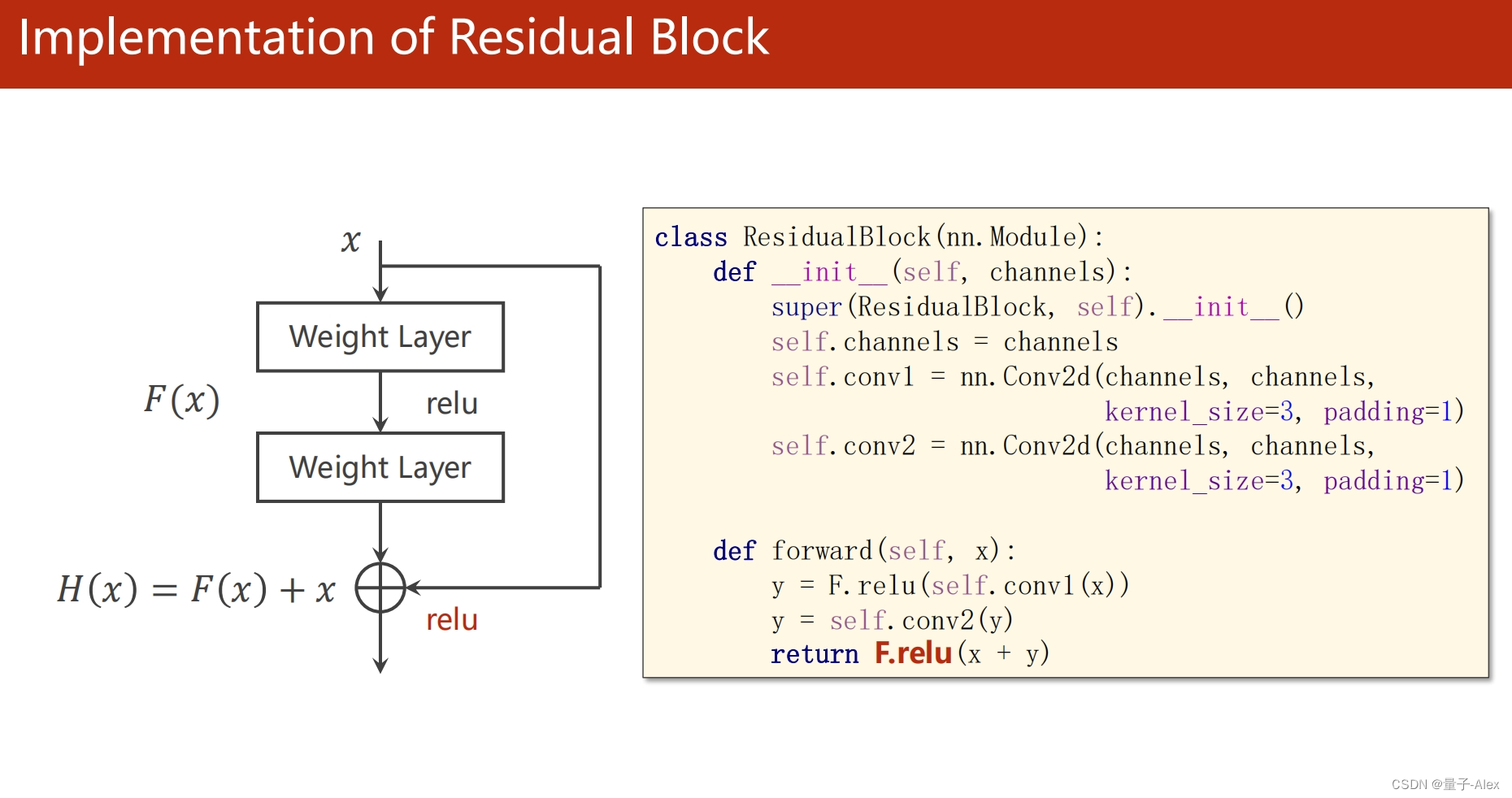
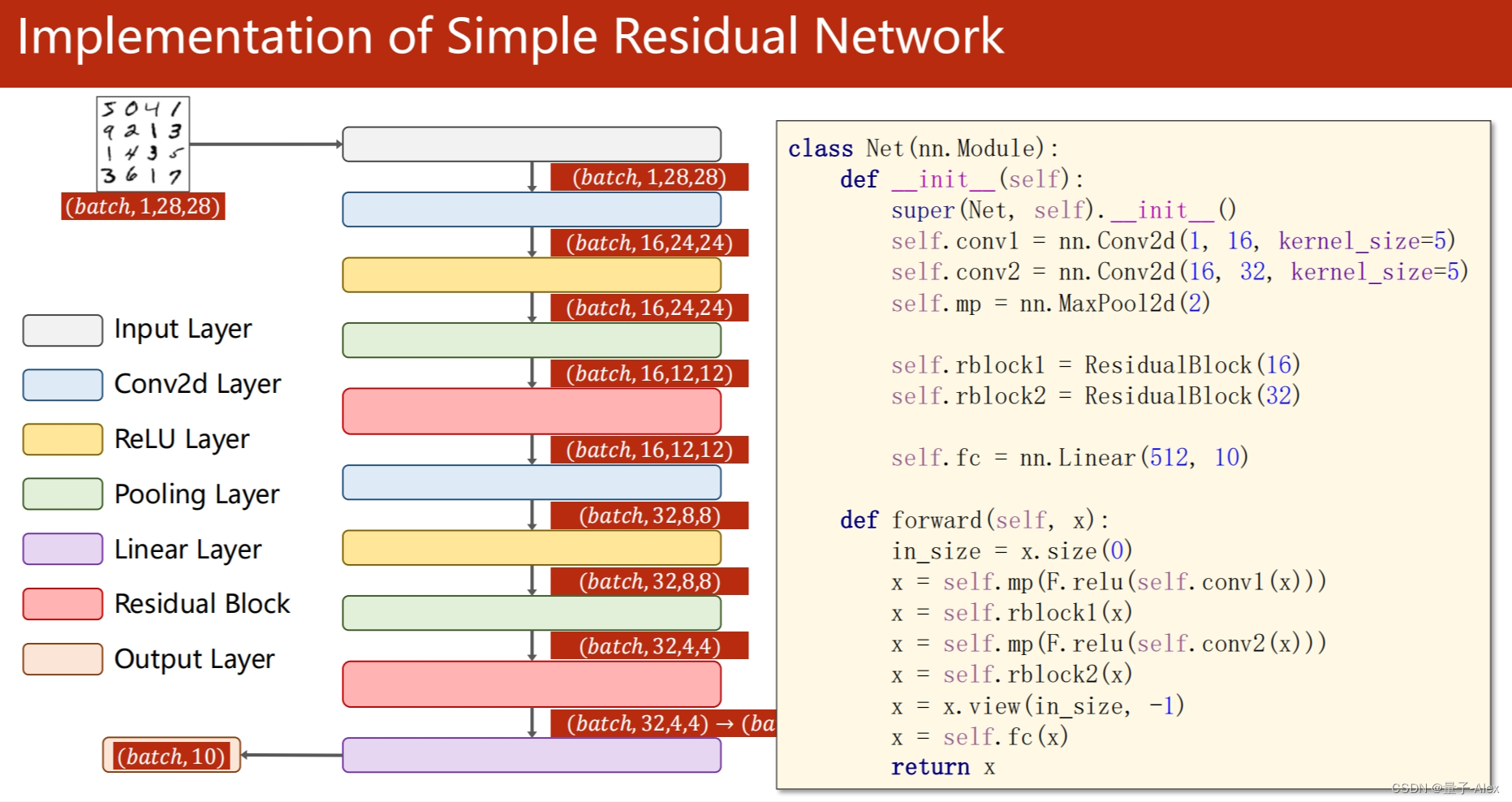
test_loader = DataLoader(test_set, batch_size=batch_size, shuffle=True)class ResidualBlock(torch.nn.Module):def __init__(self, channels):super(ResidualBlock, self).__init__()self.channels = channelsself.conv1 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)self.conv2 = nn.Conv2d(channels, channels, kernel_size=3,padding=1)def forward(self, x):y = F.relu(self.conv1(x))y = self.conv2(y)return F.relu(x + y)class Net(torch.nn.Module):def __init__(self):super(Net,self).__init__()self.conv1 = nn.Conv2d(1, 16, kernel_size=5)self.conv2 = nn.Conv2d(16, 32, kernel_size=5)self.rblock1 = ResidualBlock(16)self.rblock2 = ResidualBlock(32)self.maxpool = nn.MaxPool2d(kernel_size=2)self.fc = nn.Linear(512, 10)def forward(self, x):in_size = x.size(0)x = self.maxpool(F.relu(self.conv1(x)))x = self.rblock1(x)x = self.maxpool(F.relu(self.conv2(x)))x = self.rblock2(x)x = x.view(in_size, -1)x = self.fc(x)return xmodel = Net()
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') #把模型迁移到GPU
model = model.to(device) #把模型迁移到GPUdef train(epoch):running_loss = 0.0for i, data in enumerate(train_loader, 0):inputs, labels = datainputs,labels = inputs.to(device), labels.to(device) #训练内容迁移到GPU上optimizer.zero_grad()outputs = model(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()running_loss += loss.item()if i % 300 == 299: # print every 300 mini-batchesprint('[%d, %5d] loss: %.3f' %(epoch + 1, i + 1, running_loss / 300))running_loss = 0.0def test(epoch):correct = 0total = 0with torch.no_grad():for data in test_loader:images, labels = dataimages,labels = images.to(device), labels.to(device) #测试内容迁移到GPU上outputs = model(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()print('Accuracy of the network on the 10000 test images: %d %%' % (100 * correct / total))if __name__ == '__main__':for epoch in range(100):train(epoch)if epoch % 10 == 0:test(epoch)
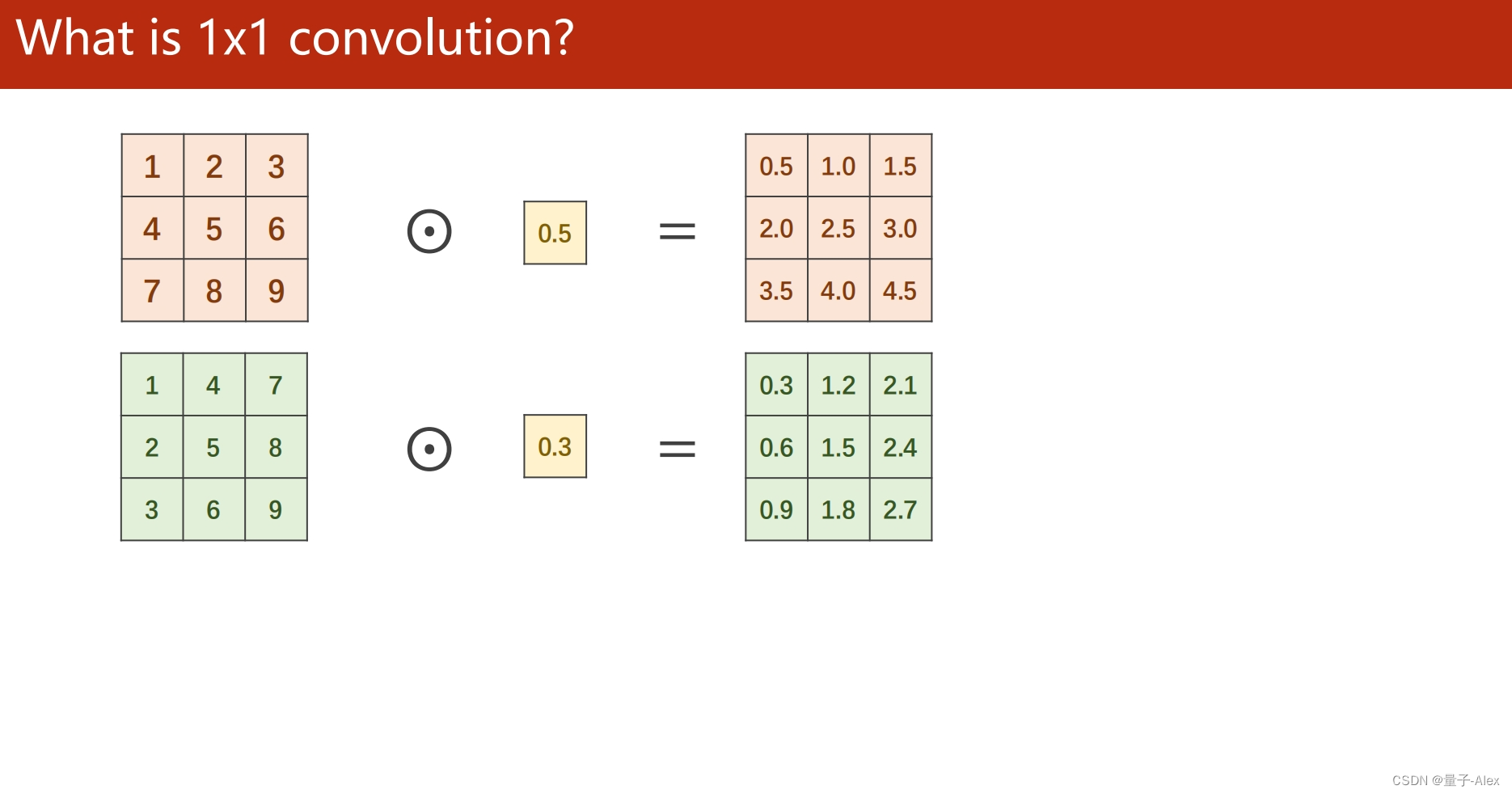
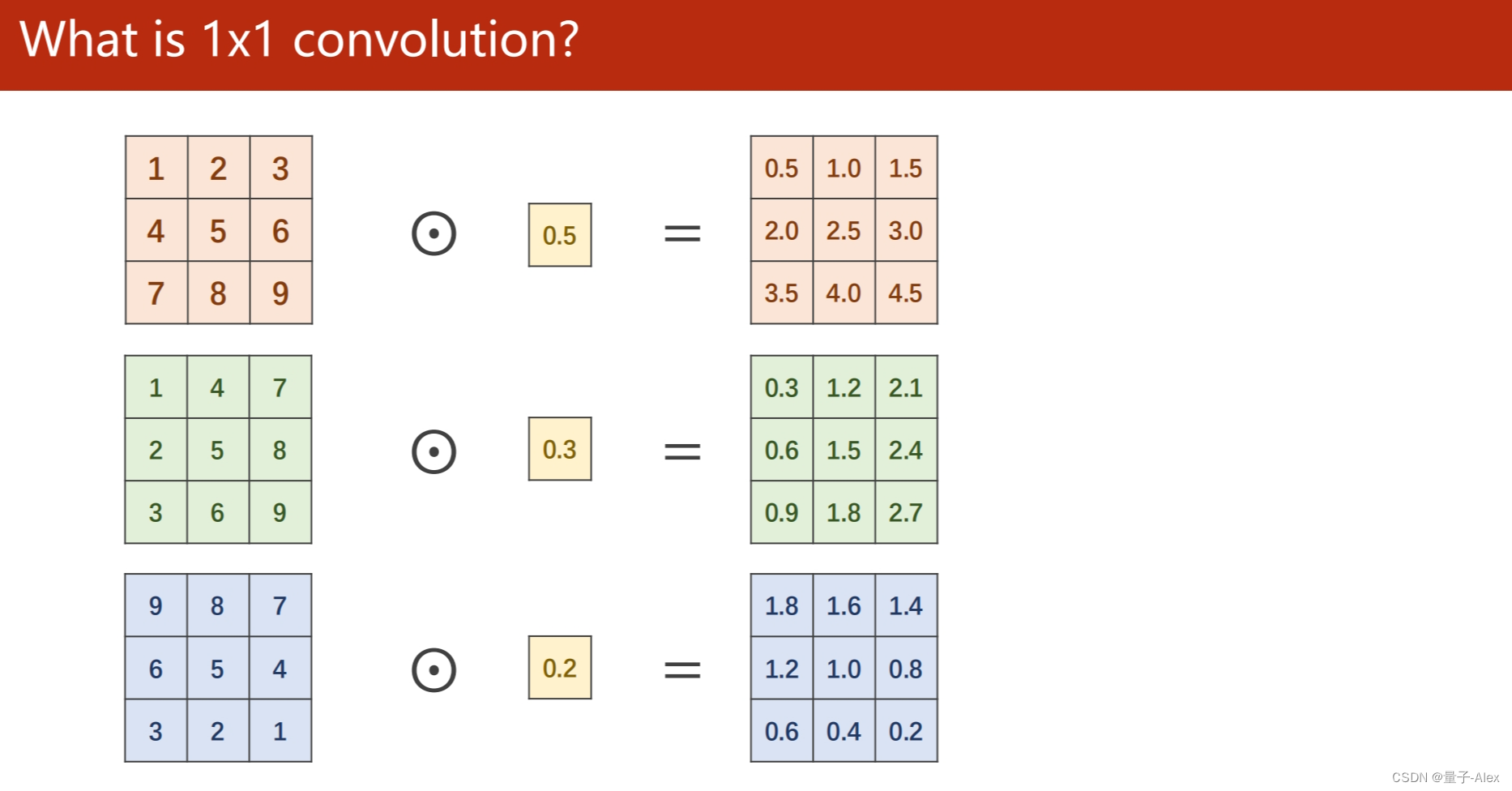
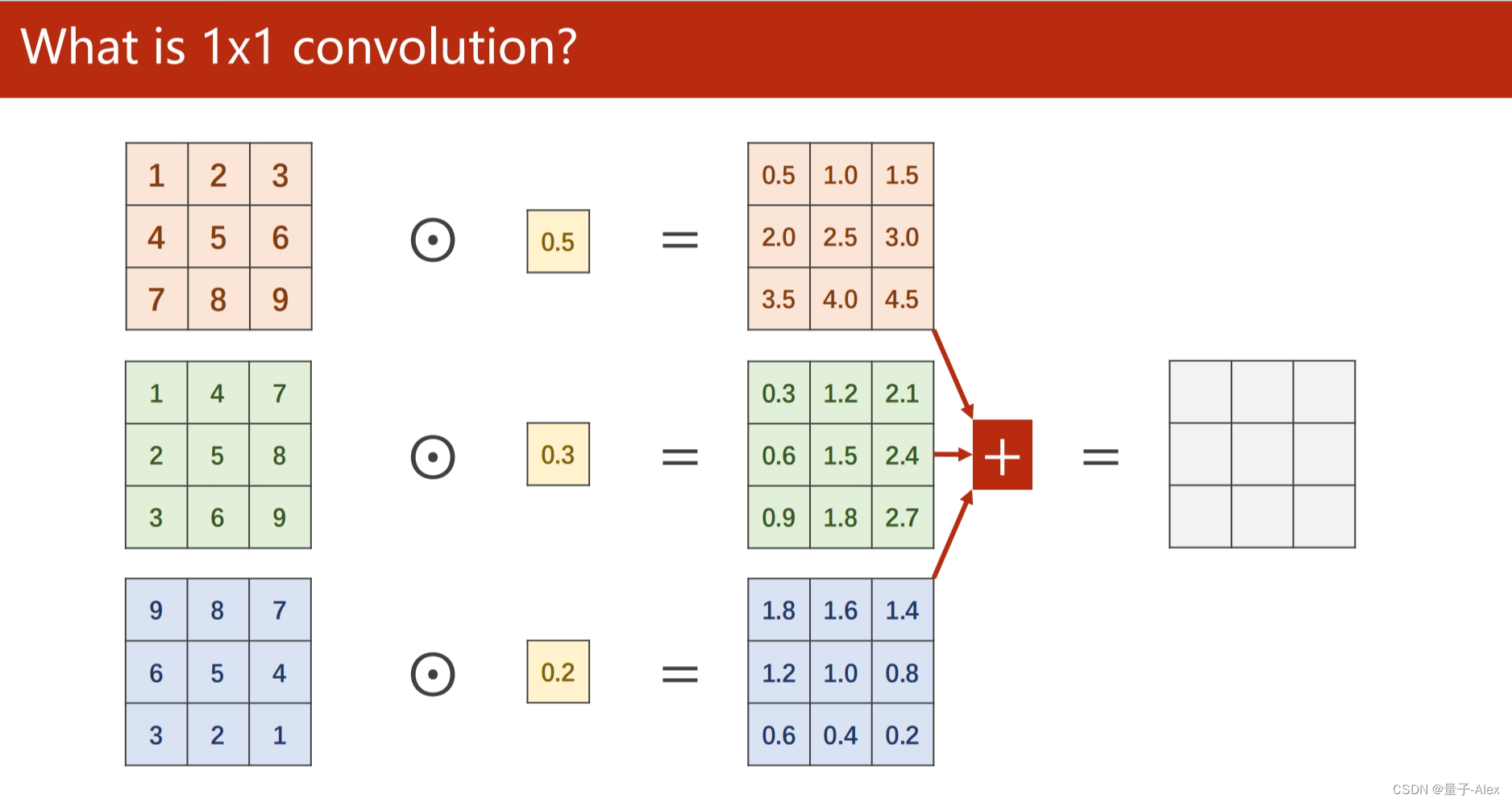
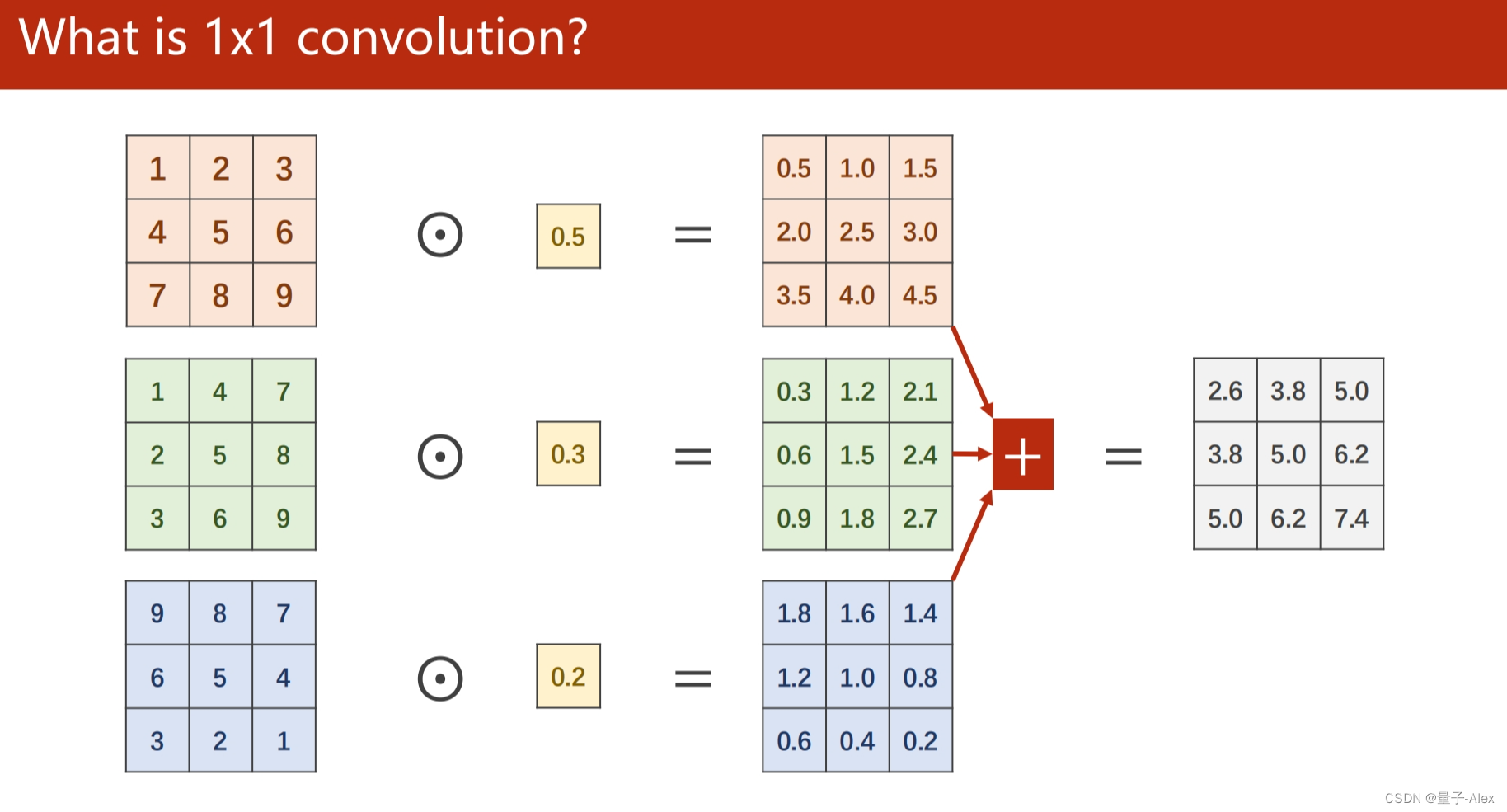
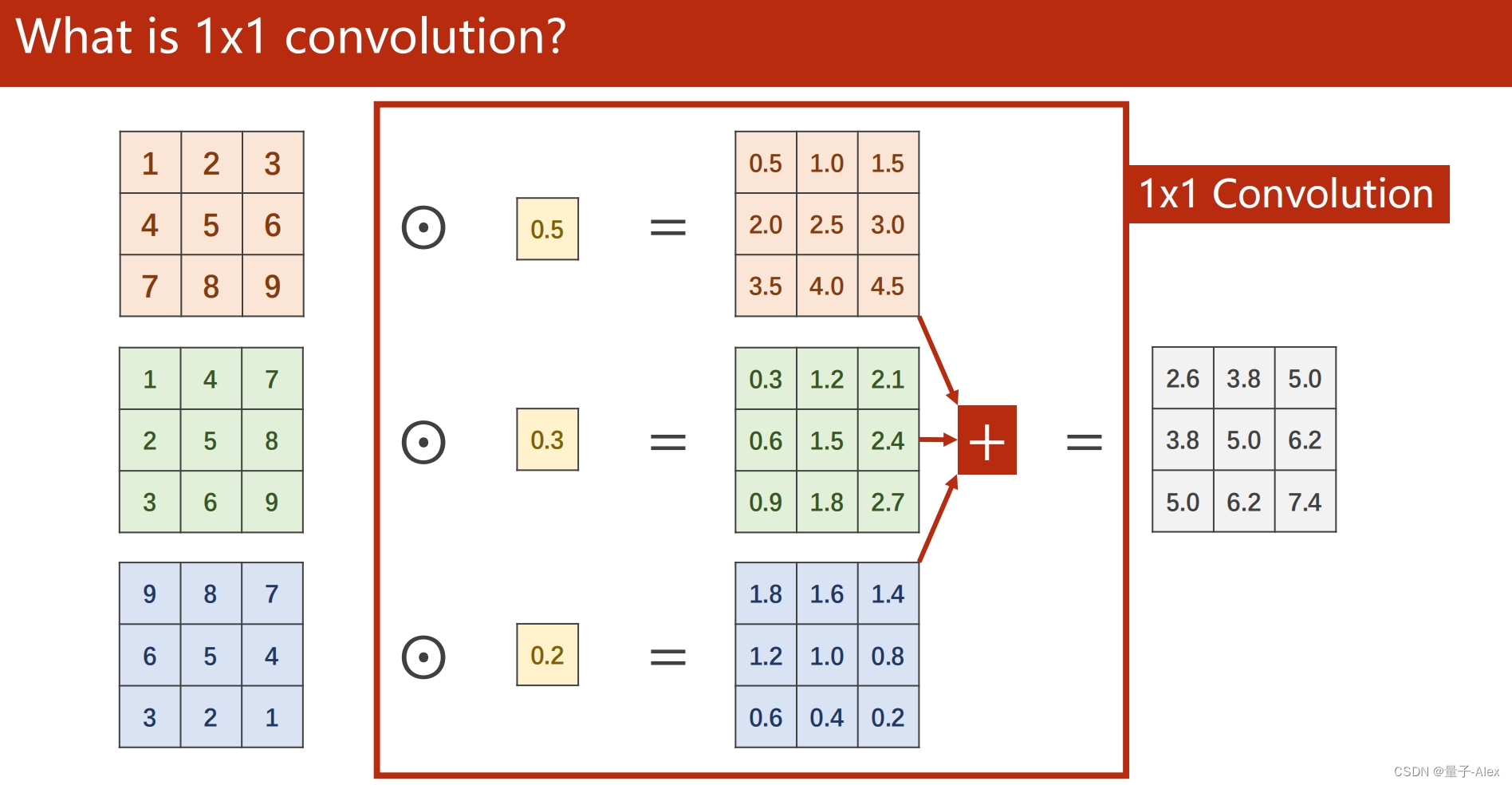
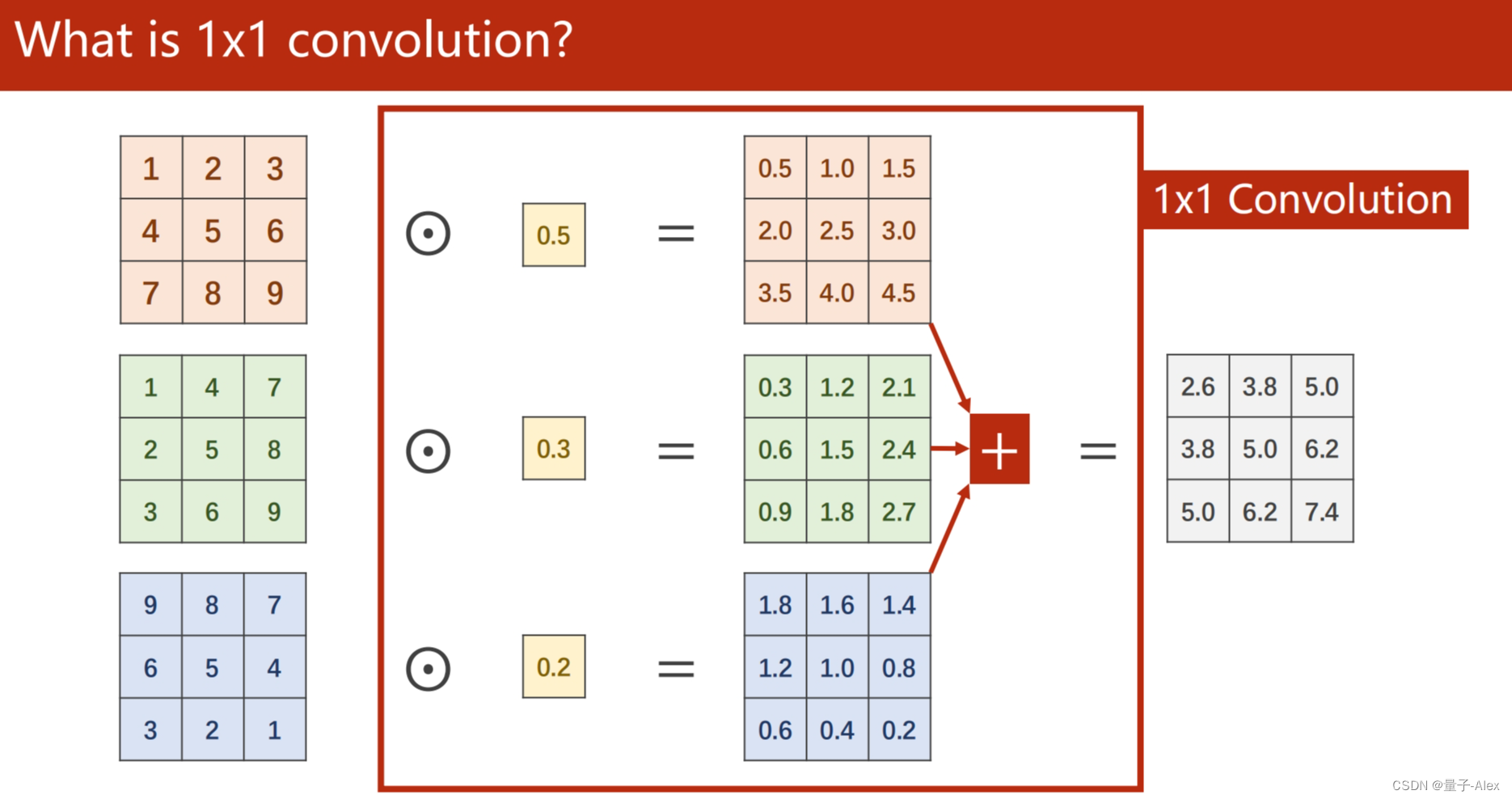
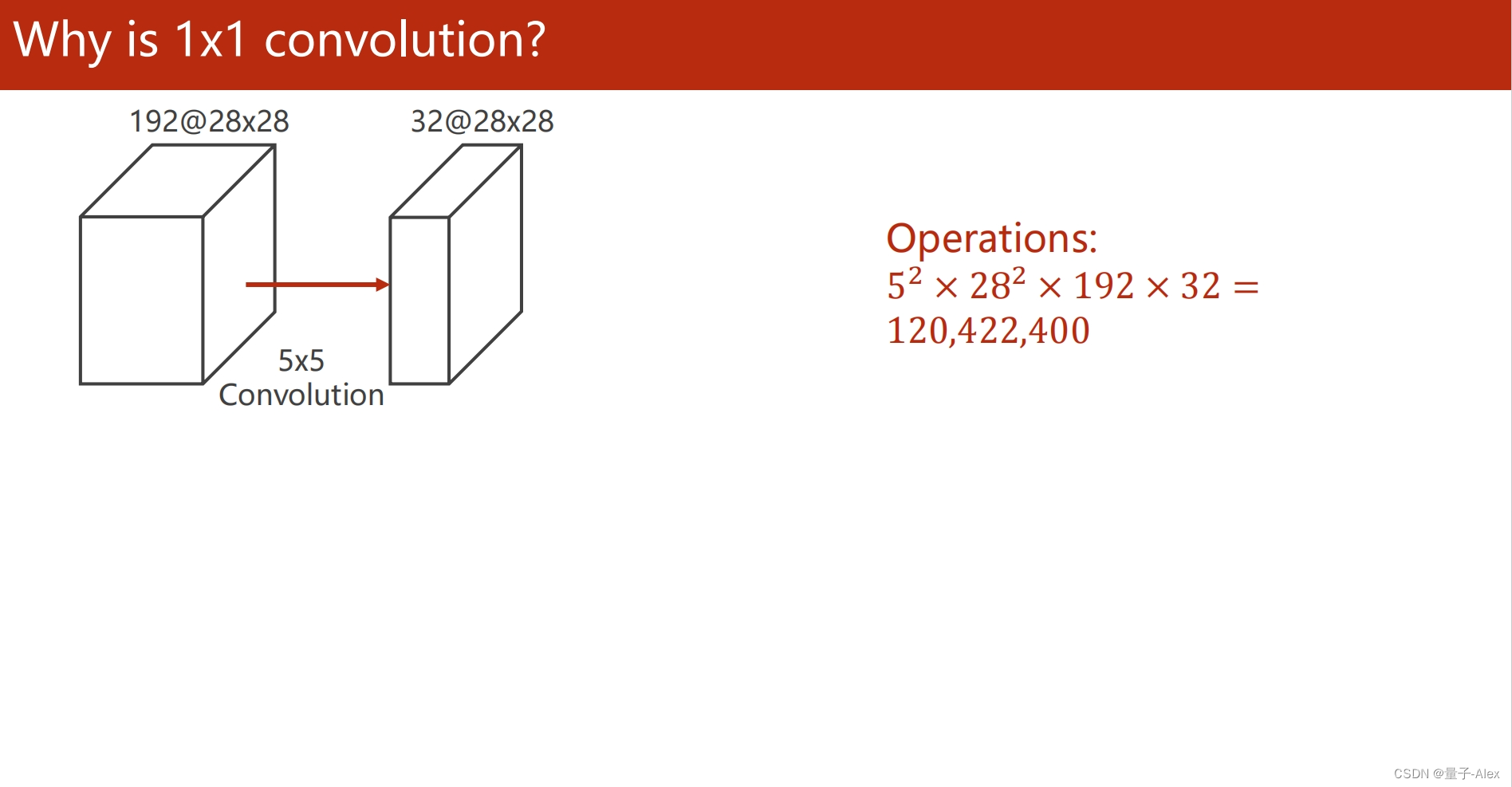
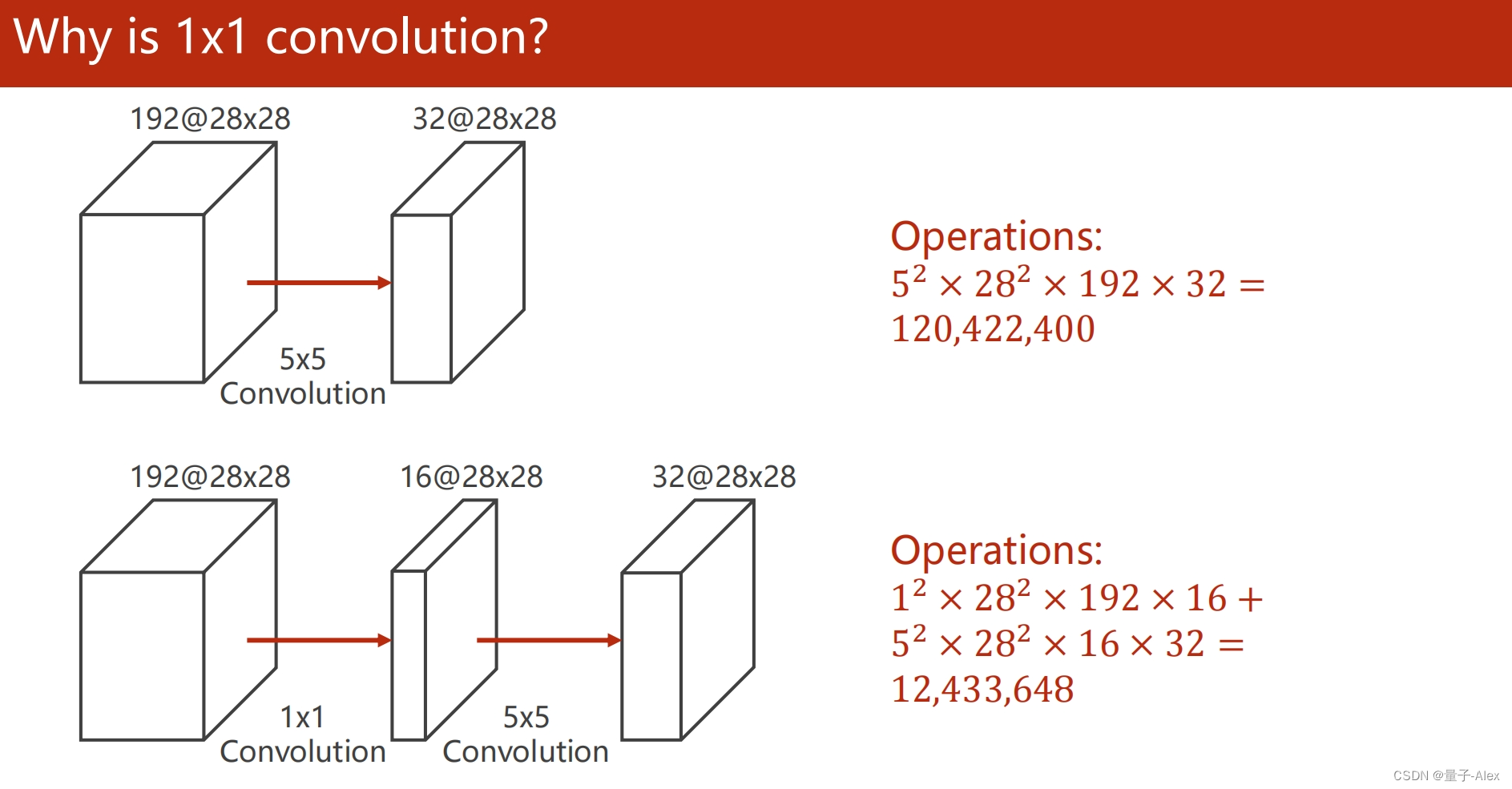
部分课件内容: