使用软件:
参考我之前的文章:
软件地址:https://github.com/DavidGillsjo/VideoIMUCapture-Android/releases
棋盘标定板下载
链接: https://pan.baidu.com/s/1wiPJsEf87Vc0D7KwJnt3GA?pwd=1234
提取码: 1234
过程
1.使用下载的软件录制一段视频,使用详见我的另一个文章
https://blog.csdn.net/qin_liang/article/details/127612977
录制的时候,可以使用电脑来显示这个棋盘格,只要根据视频上格子的大小修改标定代码中相应位置就行。录制时围绕棋盘格旋转拍摄就行。
2.录制后的视频使用ffmpeg转化为图片集,参考代码:
自己设定
import os
scene='calib'
ff_cmd = 'ffmpeg -i ./data/'+scene+'/'+scene+'.mp4 -qscale:v 1 -qmin 1 -vf fps=2 ./data/'+scene+'/input/%04d.jpg'
os.system(ff_cmd)
3.将图片转化为需要的形式,比如我这里手机采用横屏录制,那么我需要额外处理一下图片集,参考代码:
import os
from PIL import Imagedef flip_images_in_folder(src_folder, dst_folder):# 创建目标文件夹,如果它不存在os.makedirs(dst_folder, exist_ok=True)# 遍历源文件夹中的所有文件for filename in os.listdir(src_folder):# 检查文件是否是图片(这里仅检查扩展名,可能需要根据实际情况调整)if filename.lower().endswith(('.png', '.jpg', '.jpeg', '.bmp', '.gif')):# 完整路径src_path = os.path.join(src_folder, filename)dst_path = os.path.join(dst_folder, filename)# 打开图片with Image.open(src_path) as img:# 转置图片(横竖翻转)img = img.transpose(Image.TRANSPOSE)flipped_img = img.transpose(Image.FLIP_TOP_BOTTOM)# 保存转置后的图片flipped_img.save(dst_path)print(f"Flipped image saved to {dst_path}")# 使用示例# 指定源文件夹和目标文件夹
source_folder = 'D:\Data\PythonProject\gaussian-splatting\data\calib\input' # 源文件夹路径
destination_folder = 'D:\Data\PythonProject\gaussian-splatting\data\calib\input_ok' # 目标文件夹路径# 调用函数翻转图片
flip_images_in_folder(source_folder, destination_folder)
得到的横向的图片集:
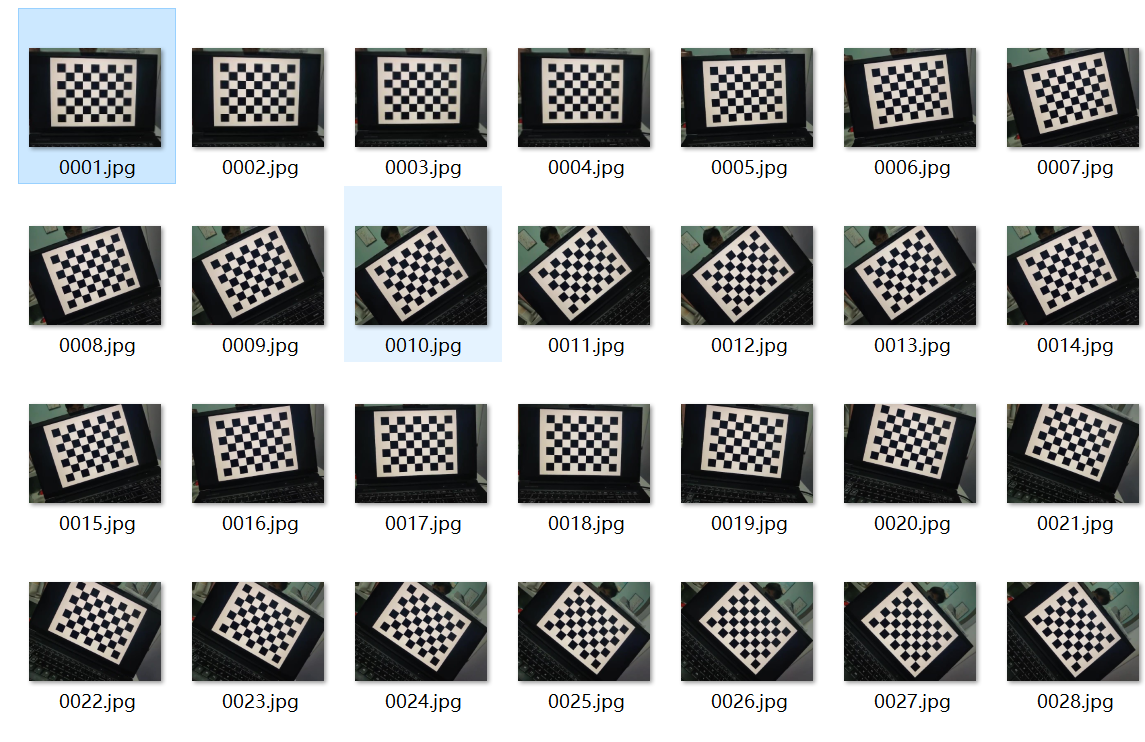
4.处理后的图片集就可以直接使用如下的代码进行标定,注意根据自己的情况修改格子size:
标定效果:
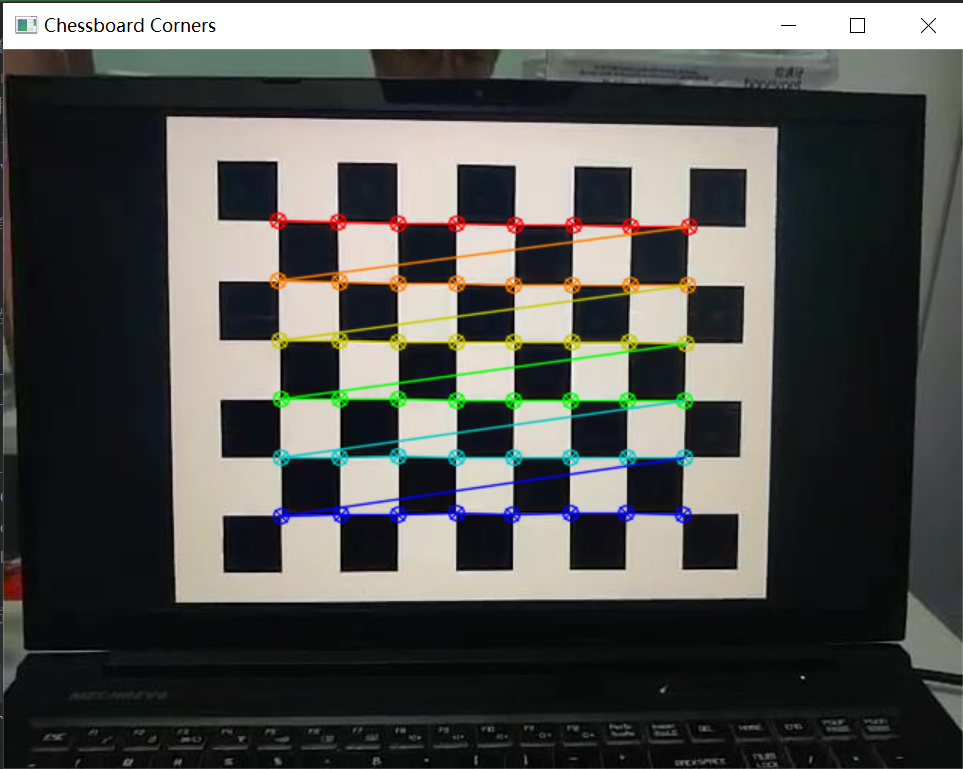
标定代码:
import numpy as np
import cv2
import os
from PIL import Image# 遍历照片
def read_images_from_folder(folder_path):images = []for filename in os.listdir(folder_path):if filename.endswith(".jpg") or filename.endswith(".png"):image_path = os.path.join(folder_path, filename)try:image = Image.open(image_path)images.append(image_path)except IOError:print("Cannot open image: ", filename)return images# 标定板格点数量和大小
pattern_size = (8, 6) # 内部角点数量
square_size = 20 # 棋盘格方块大小(毫米)# 存储棋盘格角点的3D坐标
obj_points = []
# 存储棋盘格对应的图像点坐标
img_points = []# 准备棋盘格的3D坐标
objp = np.zeros((pattern_size[0] * pattern_size[1], 3), dtype=np.float32)
objp[:, :2] = np.mgrid[0:pattern_size[0], 0:pattern_size[1]].T.reshape(-1, 2) * square_size# 指定文件夹路径
folder_path = "D:\Data\PythonProject\gaussian-splatting\data\calib\input_ok"
# 调用函数读取图片
images = read_images_from_folder(folder_path)# 遍历所有标定图像
for image_path in images:# 读取图像并将其转换为灰度图image = cv2.imread(image_path)gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 查找棋盘格角点ret, corners = cv2.findChessboardCorners(gray, pattern_size, None)# 如果找到棋盘格角点则存储对应的3D和2D坐标if ret:obj_points.append(objp)img_points.append(corners)# 在图像上绘制棋盘格角点cv2.drawChessboardCorners(image, pattern_size, corners, ret)cv2.imshow('Chessboard Corners', image)cv2.waitKey(500)# 进行相机内参标定
ret, camera_matrix, dist_coeffs, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points, gray.shape[::-1], None, None)# 打印相机内参和畸变系数
print("Camera Matrix:\n", camera_matrix)
print("\nDistortion Coefficients:\n", dist_coeffs)
np.savetxt('camera_matrix.txt', camera_matrix)
np.savetxt('dist_coeffs.txt', dist_coeffs)