一、Freertos简介
1.Freertos介绍
1)RTOS指的是一类的实时操作系统
2)rtos的使用:用户根据对任务来设置其优先级然后来使用调度器来决定哪一个任务来先执行。
3)Freertos的文件数量远低于其他操作系统
4)主要特点:支持抢占式
2.为何选择FreeRTOS
1)市场占用率高
2)免费,开源
3)有较多的组件

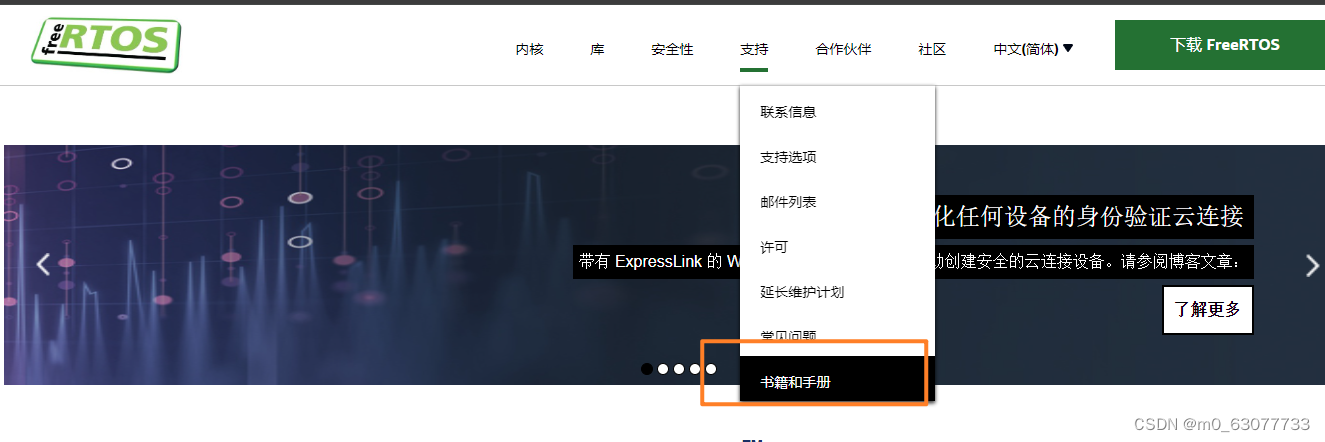
3.获取Freertos资料
官网:FreeRTOS - Free RTOS Source Code Downloads, the official FreeRTOS zip file release download
查看历史版本:FreeRTOS Real Time Kernel (RTOS) - Browse /FreeRTOS at SourceForge.net

相关文档的下载
 4.Freertos编程风格
4.Freertos编程风格
1)实际上是对C的数据类型进行了重定义
2)数据类型在portacro.h【\FreeRTOSv9.0.0\FreeRTOS\Source\portable\RVDS\ARM_CM3】
1.数据类型

2.变量名

3.函数名

4.宏

二、将Freertos移植到STM32
1.源码下载
下载:V9.0.0【稳定,文件资料多】
FreeRTOS Real Time Kernel (RTOS) download | SourceForge.net
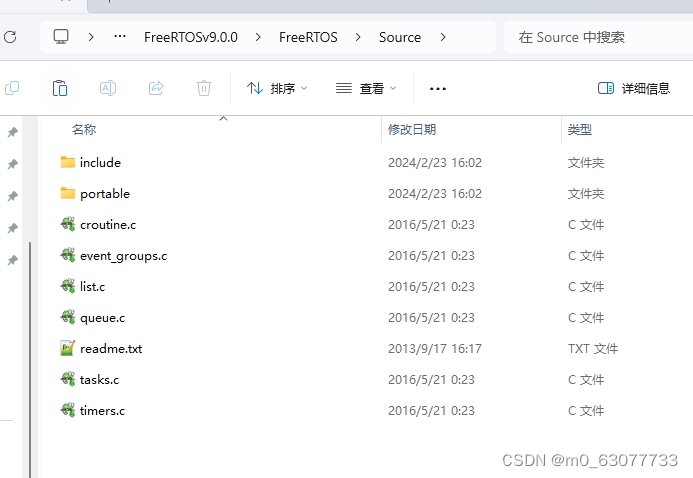
2.文件介绍


task.c----》是任务创建,调度等函数的实现

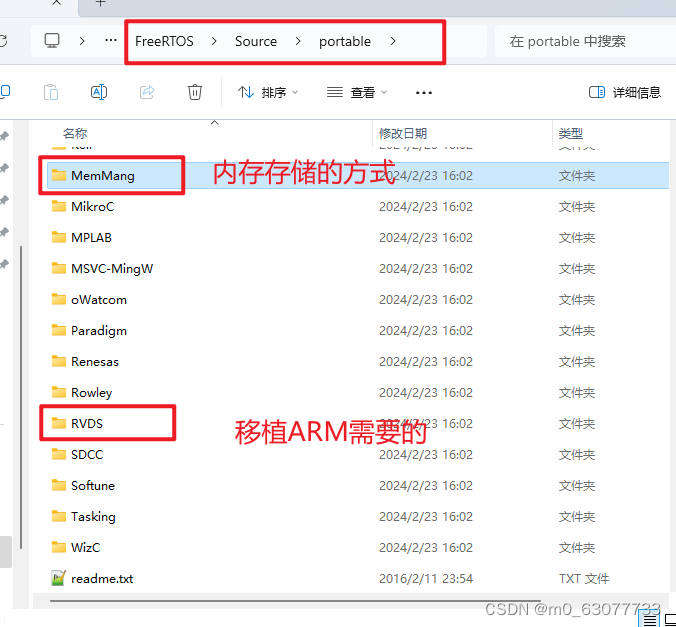
port.c---》针对不同硬件平台的接口文件,主要负责实现与硬件相关的功能


3.Freertos移植
1.将FreeRTOS的源码复制到我们待移植的文件夹中
2.添加相关的文件


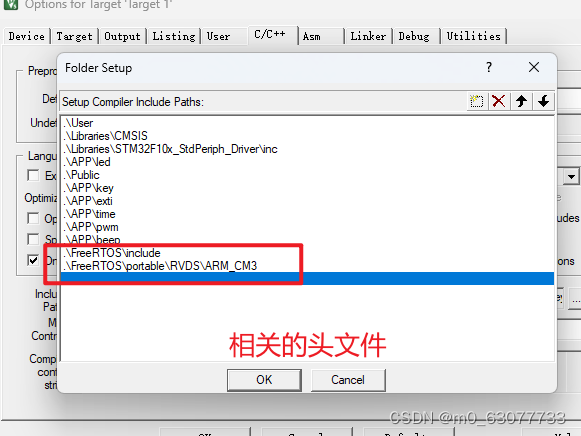
3.添加FreeRTOSConfig.h的文件
这个头文件在我们移植相关的MCU的示例代码文件夹中有
文件作用:FreeRTOS相关的配置


/*FreeRTOS V9.0.0 - Copyright (C) 2016 Real Time Engineers Ltd.All rights reservedVISIT http://www.FreeRTOS.org TO ENSURE YOU ARE USING THE LATEST VERSION.This file is part of the FreeRTOS distribution.FreeRTOS is free software; you can redistribute it and/or modify it underthe terms of the GNU General Public License (version 2) as published by theFree Software Foundation >>>> AND MODIFIED BY <<<< the FreeRTOS exception.***************************************************************************>>! NOTE: The modification to the GPL is included to allow you to !<<>>! distribute a combined work that includes FreeRTOS without being !<<>>! obliged to provide the source code for proprietary components !<<>>! outside of the FreeRTOS kernel. !<<***************************************************************************FreeRTOS is distributed in the hope that it will be useful, but WITHOUT ANYWARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESSFOR A PARTICULAR PURPOSE. Full license text is available on the followinglink: http://www.freertos.org/a00114.html**************************************************************************** ** FreeRTOS provides completely free yet professionally developed, ** robust, strictly quality controlled, supported, and cross ** platform software that is more than just the market leader, it ** is the industry's de facto standard. ** ** Help yourself get started quickly while simultaneously helping ** to support the FreeRTOS project by purchasing a FreeRTOS ** tutorial book, reference manual, or both: ** http://www.FreeRTOS.org/Documentation ** ****************************************************************************http://www.FreeRTOS.org/FAQHelp.html - Having a problem? Start by readingthe FAQ page "My application does not run, what could be wrong?". Have youdefined configASSERT()?http://www.FreeRTOS.org/support - In return for receiving this top qualityembedded software for free we request you assist our global community byparticipating in the support forum.http://www.FreeRTOS.org/training - Investing in training allows your team tobe as productive as possible as early as possible. Now you can receiveFreeRTOS training directly from Richard Barry, CEO of Real Time EngineersLtd, and the world's leading authority on the world's leading RTOS.http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,including FreeRTOS+Trace - an indispensable productivity tool, a DOScompatible FAT file system, and our tiny thread aware UDP/IP stack.http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.http://www.OpenRTOS.com - Real Time Engineers ltd. license FreeRTOS to HighIntegrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOSlicenses offer ticketed support, indemnification and commercial middleware.http://www.SafeRTOS.com - High Integrity Systems also provide a safetyengineered and independently SIL3 certified version for use in safety andmission critical applications that require provable dependability.*/#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H#include "system.h"
#include "usart.h"//针对不同的编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)#include <stdint.h>extern uint32_t SystemCoreClock;
#endif//断言
#define vAssertCalled(char,int) printf("Error:%s,%d\r\n",char,int)
#define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__)/************************************************************************* FreeRTOS基础配置配置选项 *********************************************************************/
/* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片)* * 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。* 协作式操作系统是任务主动释放CPU后,切换到下一个任务。* 任务切换的时机完全取决于正在运行的任务。*/
#define configUSE_PREEMPTION 1//1使能时间片调度(默认式使能的)
#define configUSE_TIME_SLICING 1 /* 某些运行FreeRTOS的硬件有两种方法选择下一个要执行的任务:* 通用方法和特定于硬件的方法(以下简称“特殊方法”)。* * 通用方法:* 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。* 2.可以用于所有FreeRTOS支持的硬件* 3.完全用C实现,效率略低于特殊方法。* 4.不强制要求限制最大可用优先级数目* 特殊方法:* 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。* 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。* 3.比通用方法更高效* 4.一般强制限定最大可用优先级数目为32* 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0!*/
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1 /* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行* 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决* * 下载方法:* 1.将开发版正常连接好* 2.按住复位按键,点击下载瞬间松开复位按键* * 1.通过跳线帽将 BOOT 0 接高电平(3.3V)* 2.重新上电,下载* * 1.使用FlyMcu擦除一下芯片,然后进行下载* STMISP -> 清除芯片(z)*/
#define configUSE_TICKLESS_IDLE 0 /** 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk* Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz,* 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期;*/
#define configCPU_CLOCK_HZ (SystemCoreClock)//RTOS系统节拍中断的频率。即一秒中断的次数,每次中断RTOS都会进行任务调度
#define configTICK_RATE_HZ (( TickType_t )1000)//可使用的最大优先级
#define configMAX_PRIORITIES (32)//空闲任务使用的堆栈大小
#define configMINIMAL_STACK_SIZE ((unsigned short)128)//任务名字字符串长度
#define configMAX_TASK_NAME_LEN (16)//系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
#define configUSE_16_BIT_TICKS 0 //空闲任务放弃CPU使用权给其他同优先级的用户任务
#define configIDLE_SHOULD_YIELD 1 //启用队列
#define configUSE_QUEUE_SETS 0 //开启任务通知功能,默认开启
#define configUSE_TASK_NOTIFICATIONS 1 //使用互斥信号量
#define configUSE_MUTEXES 0 //使用递归互斥信号量
#define configUSE_RECURSIVE_MUTEXES 0 //为1时使用计数信号量
#define configUSE_COUNTING_SEMAPHORES 0/* 设置可以注册的信号量和消息队列个数 */
#define configQUEUE_REGISTRY_SIZE 10 #define configUSE_APPLICATION_TASK_TAG 0 /*****************************************************************FreeRTOS与内存申请有关配置选项
*****************************************************************/
//支持动态内存申请
#define configSUPPORT_DYNAMIC_ALLOCATION 1
//支持静态内存
#define configSUPPORT_STATIC_ALLOCATION 0
//系统所有总的堆大小
#define configTOTAL_HEAP_SIZE ((size_t)(36*1024)) /***************************************************************FreeRTOS与钩子函数有关的配置选项
**************************************************************/
/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子* * 空闲任务钩子是一个函数,这个函数由用户来实现,* FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),* 这个函数在每个空闲任务周期都会被调用* 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。* 因此必须保证空闲任务可以被CPU执行* 使用空闲钩子函数设置CPU进入省电模式是很常见的* 不可以调用会引起空闲任务阻塞的API函数*/
#define configUSE_IDLE_HOOK 0 /* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子* * * 时间片钩子是一个函数,这个函数由用户来实现,* FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )* 时间片中断可以周期性的调用* 函数必须非常短小,不能大量使用堆栈,* 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数*//*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
#define configUSE_TICK_HOOK 0 //使用内存申请失败钩子函数
#define configUSE_MALLOC_FAILED_HOOK 0 /** 大于0时启用堆栈溢出检测功能,如果使用此功能 * 用户必须提供一个栈溢出钩子函数,如果使用的话* 此值可以为1或者2,因为有两种栈溢出检测方法 */
#define configCHECK_FOR_STACK_OVERFLOW 0 /********************************************************************FreeRTOS与运行时间和任务状态收集有关的配置选项
**********************************************************************/
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 0 //启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 0
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数* prvWriteNameToBuffer()* vTaskList(),* vTaskGetRunTimeStats()
*/
#define configUSE_STATS_FORMATTING_FUNCTIONS 1 /********************************************************************FreeRTOS与协程有关的配置选项
*********************************************************************/
//启用协程,启用协程以后必须添加文件croutine.c
#define configUSE_CO_ROUTINES 0
//协程的有效优先级数目
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 ) /***********************************************************************FreeRTOS与软件定时器有关的配置选项
**********************************************************************///启用软件定时器
#define configUSE_TIMERS 0
//软件定时器优先级
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
//软件定时器队列长度
#define configTIMER_QUEUE_LENGTH 10
//软件定时器任务堆栈大小
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2) /************************************************************FreeRTOS可选函数配置选项
************************************************************/
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 0
//#define INCLUDE_xTaskGetCurrentTaskHandle 1
//#define INCLUDE_uxTaskGetStackHighWaterMark 0
//#define INCLUDE_xTaskGetIdleTaskHandle 0/******************************************************************FreeRTOS与中断有关的配置选项
******************************************************************/
#ifdef __NVIC_PRIO_BITS#define configPRIO_BITS __NVIC_PRIO_BITS
#else#define configPRIO_BITS 4
#endif
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 //系统可管理的最高中断优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 #define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )/****************************************************************FreeRTOS与中断服务函数有关的配置选项
****************************************************************/
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler/* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */
#if ( configUSE_TRACE_FACILITY == 1 )
#include "trcRecorder.h"
#define INCLUDE_xTaskGetCurrentTaskHandle 1 // 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)
#endif#endif /* FREERTOS_CONFIG_H */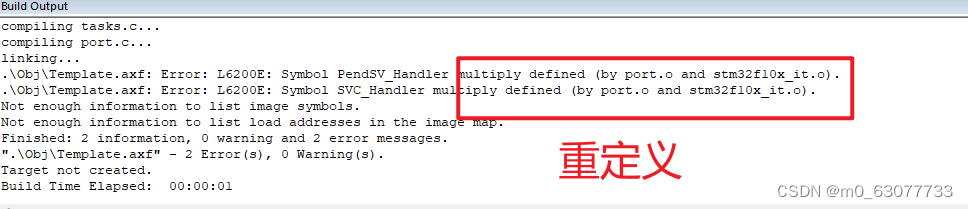
因为在我们的FreeRTOSConfig.h文件中定义了跟stm32f103xx_it.c中相同的函数,所以我们需要将stm32f103xx_it.c中的函数注释掉


4.修改SysTick文件
因为在操作系统中的SysTick被用做系统时钟,所以我们的Timebase Source不能在使用SysTick

5.修改stm32f103xx_it.c
SysTick是我们操作系统的时钟,所以使用到中断处理函数,就要使用SysTick来进行计时
xPortSysTickHandler函数
1)FreeRTOS实现实时多任务调度的重要机制之一,它利用SysTick硬件定时器为系统提供稳定的时钟源,并通过周期性中断来实现任务的调度和切换。
2)具体来说,xPortSysTickHandler函数的功能是调用xTaskIncrementTick()使嘀嗒信号计数值递增,并且检查是否需要进行上下文切换。如果需要进行上下文切换,就将PendSV中断挂起,实际的上下文切换是在PendSV的中断处理程序里执行的。这样,FreeRTOS就能够实现多任务并发执行,使得各个任务能够按照设定的优先级和时间片进行调度。
/**在FreeRTOS中,SysTick是系统时钟,每一个任务的调度都要使用到SysTick,所以我们才需要
*/
void SysTick_Handler(void)
{if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED) //判断此时是否有任务在执行{xPortSysTickHandler(); //调用port.c中已写好的中断函数}
}4.SysTick的编写
#include "SysTick.h"
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数//初始化延迟函数
//SYSTICK的时钟固定为AHB时钟,基础例程里面SYSTICK时钟频率为AHB/8
//SYSCLK:系统时钟频率
void SysTick_Init(u8 SYSCLK)
{u32 reload;//配置系统时钟源SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);//选择外部时钟 HCLK--->72MHZ//1MHZ=1/1000 000=1usfac_us=SystemCoreClock/1000000; //不论是否使用OS,fac_us都需要使用//每秒SysTick定时器需要计数的次数reload=SystemCoreClock/1000000; //每秒钟的计数次数 单位为M //这个reload为了计算出://reload=(SystemCoreClock/1000000)*(1000000/configTICK_RATE_HZ)// =SystemCoreClock/configTICK_RATE_HZ=系统时钟频率/RTOS的任务调度频率=一个系统时钟需要进行几个任务调度reload=reload*(1000000/configTICK_RATE_HZ); //根据configTICK_RATE_HZ((RTOS的任务调度频率))设定溢出时间//reload为24位寄存器,最大值:16777216,在72M下,约合0.233s左右 fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延时的最少单位 SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断SysTick->LOAD=reload; //每1/configTICK_RATE_HZ秒中断一次 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
} //延时nus
//nus:要延时的us数.
//nus:0~204522252(最大值即2^32/fac_us@fac_us=168)
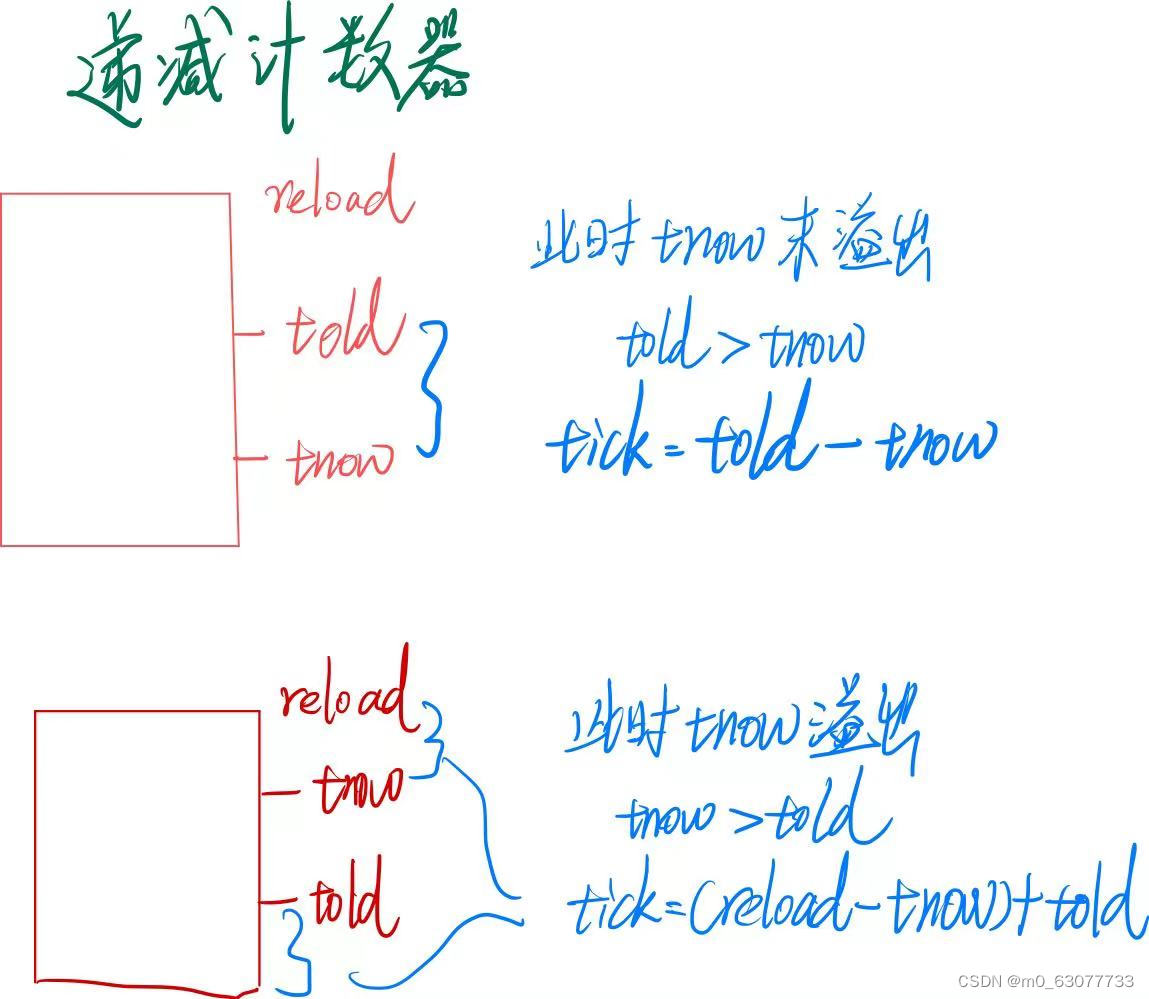
/*递减计数器:told>tnowreloadtoldtnow此时的tick=told-tnow
*//*递减计数器:tnow>toldreloadtnowtold此时的tick=(reload-tnow)+told
*/
void delay_us(u32 nus)
{ u32 ticks;u32 told,tnow,tcnt=0;u32 reload=SysTick->LOAD; //LOAD的值 ticks=nus*fac_us; //需要的节拍数 //记录刚刚进入的tick值told=SysTick->VAL; //刚进入时的计数器值while(1){tnow=SysTick->VAL; if(tnow!=told){ if(tnow<told)tcnt=tcnt+(told-tnow); //这里注意一下SYSTICK是一个递减的计数器就可以了.else tcnt=tcnt+(reload-tnow)+told; told=tnow;if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.} };
}
//延时nms
//nms:要延时的ms数
//nms:0~65535
//因为这个函数调用了vTaskDelay,所以当调用这个函数的时候会引发任务调度
void delay_ms(u32 nms)
{ if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行{ if(nms>=fac_ms) //延时的时间大于OS的最少时间周期 { vTaskDelay(nms/fac_ms); //FreeRTOS延时}nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时 }delay_us((u32)(nms*1000)); //普通方式延时
}//延时nms,不会引起任务调度
//nms:要延时的ms数
//这个延时函数不会引发任务调度
void delay_xms(u32 nms)
{u32 i;for(i=0;i<nms;i++) delay_us(1000);
}4.FreeRTOSConfig.h文件
/*FreeRTOS V9.0.0 - Copyright (C) 2016 Real Time Engineers Ltd.All rights reservedVISIT http://www.FreeRTOS.org TO ENSURE YOU ARE USING THE LATEST VERSION.This file is part of the FreeRTOS distribution.FreeRTOS is free software; you can redistribute it and/or modify it underthe terms of the GNU General Public License (version 2) as published by theFree Software Foundation >>>> AND MODIFIED BY <<<< the FreeRTOS exception.***************************************************************************>>! NOTE: The modification to the GPL is included to allow you to !<<>>! distribute a combined work that includes FreeRTOS without being !<<>>! obliged to provide the source code for proprietary components !<<>>! outside of the FreeRTOS kernel. !<<***************************************************************************FreeRTOS is distributed in the hope that it will be useful, but WITHOUT ANYWARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESSFOR A PARTICULAR PURPOSE. Full license text is available on the followinglink: http://www.freertos.org/a00114.html**************************************************************************** ** FreeRTOS provides completely free yet professionally developed, ** robust, strictly quality controlled, supported, and cross ** platform software that is more than just the market leader, it ** is the industry's de facto standard. ** ** Help yourself get started quickly while simultaneously helping ** to support the FreeRTOS project by purchasing a FreeRTOS ** tutorial book, reference manual, or both: ** http://www.FreeRTOS.org/Documentation ** ****************************************************************************http://www.FreeRTOS.org/FAQHelp.html - Having a problem? Start by readingthe FAQ page "My application does not run, what could be wrong?". Have youdefined configASSERT()?http://www.FreeRTOS.org/support - In return for receiving this top qualityembedded software for free we request you assist our global community byparticipating in the support forum.http://www.FreeRTOS.org/training - Investing in training allows your team tobe as productive as possible as early as possible. Now you can receiveFreeRTOS training directly from Richard Barry, CEO of Real Time EngineersLtd, and the world's leading authority on the world's leading RTOS.http://www.FreeRTOS.org/plus - A selection of FreeRTOS ecosystem products,including FreeRTOS+Trace - an indispensable productivity tool, a DOScompatible FAT file system, and our tiny thread aware UDP/IP stack.http://www.FreeRTOS.org/labs - Where new FreeRTOS products go to incubate.Come and try FreeRTOS+TCP, our new open source TCP/IP stack for FreeRTOS.http://www.OpenRTOS.com - Real Time Engineers ltd. license FreeRTOS to HighIntegrity Systems ltd. to sell under the OpenRTOS brand. Low cost OpenRTOSlicenses offer ticketed support, indemnification and commercial middleware.http://www.SafeRTOS.com - High Integrity Systems also provide a safetyengineered and independently SIL3 certified version for use in safety andmission critical applications that require provable dependability.*/#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H#include "system.h"
#include "usart.h"//针对不同的编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)#include <stdint.h>extern uint32_t SystemCoreClock;
#endif//断言:捕捉假设,异常处理,测试的时候快速定位
#define vAssertCalled(char,int) printf("Error:%s,%d\r\n",char,int)
#define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__)/************************************************************************* FreeRTOS基础配置配置选项 *********************************************************************/
/* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片)* * 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。* 协作式操作系统是任务主动释放CPU后,切换到下一个任务。* 任务切换的时机完全取决于正在运行的任务。*/
#define configUSE_PREEMPTION 1//1使能时间片调度(默认式使能的)【优先级相同的时候使用】
#define configUSE_TIME_SLICING 1 /* 某些运行FreeRTOS的硬件有两种方法【选择下一个要执行的任务:】* 通用方法和特定于硬件的方法(以下简称“特殊方法”)。* * 通用方法:* 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。* 2.可以用于所有FreeRTOS支持的硬件* 3.完全用C实现,效率略低于特殊方法。* 4.不强制要求限制最大可用优先级数目* 特殊方法:* 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。* 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。* 3.比通用方法更高效* 4.一般强制限定最大可用优先级数目为32* 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0!*/
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1 /* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行* 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决* * 下载方法:* 1.将开发版正常连接好* 2.按住复位按键,点击下载瞬间松开复位按键* * 1.通过跳线帽将 BOOT 0 接高电平(3.3V)* 2.重新上电,下载* * 1.使用FlyMcu擦除一下芯片,然后进行下载* STMISP -> 清除芯片(z)*/
#define configUSE_TICKLESS_IDLE 0 /** 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk* Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz,* 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期;*/
#define configCPU_CLOCK_HZ (SystemCoreClock)//RTOS系统节拍中断的频率。即一秒中断的次数,每次中断RTOS都会进行任务调度
//时钟节拍:按照固定的时钟频率产生中断
#define configTICK_RATE_HZ (( TickType_t )1000)//可使用的最大优先级
//默认优先级有32个,数值越小优先级越低【0级:是默认任务使用】
#define configMAX_PRIORITIES (32)//空闲任务使用的堆栈大小,字为单位
#define configMINIMAL_STACK_SIZE ((unsigned short)128)//任务名字字符串长度,包括'\0'
#define configMAX_TASK_NAME_LEN (16)//系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
#define configUSE_16_BIT_TICKS 0 //空闲任务放弃CPU使用权给其他同优先级的用户任务,启用抢占式
#define configIDLE_SHOULD_YIELD 1 //启用队列
#define configUSE_QUEUE_SETS 0 //开启任务通知功能,默认开启
#define configUSE_TASK_NOTIFICATIONS 1 //使用互斥信号量
#define configUSE_MUTEXES 0 //使用递归互斥信号量
#define configUSE_RECURSIVE_MUTEXES 0 //为1时使用计数信号量
#define configUSE_COUNTING_SEMAPHORES 0/* 设置可以注册的信号量和消息队列个数 */
#define configQUEUE_REGISTRY_SIZE 10 #define configUSE_APPLICATION_TASK_TAG 0 /*****************************************************************FreeRTOS与内存申请有关配置选项
*****************************************************************/
//支持动态内存申请,自动分配栈大小
#define configSUPPORT_DYNAMIC_ALLOCATION 1
//支持静态内存
#define configSUPPORT_STATIC_ALLOCATION 0
//系统所有总的堆大小
#define configTOTAL_HEAP_SIZE ((size_t)(36*1024))//36K /***************************************************************FreeRTOS与钩子函数有关的配置选项
**************************************************************/
/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子* * 空闲任务钩子是一个函数,这个函数由用户来实现,* FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),* 这个函数在每个空闲任务周期都会被调用* 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。* 因此必须保证空闲任务可以被CPU执行* 使用空闲钩子函数设置CPU进入省电模式是很常见的* 不可以调用会引起空闲任务阻塞的API函数*/
#define configUSE_IDLE_HOOK 0 /* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子* * * 时间片钩子是一个函数,这个函数由用户来实现,* FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )* 时间片中断可以周期性的调用* 函数必须非常短小,不能大量使用堆栈,* 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数*//*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
#define configUSE_TICK_HOOK 0 //使用内存申请失败钩子函数
#define configUSE_MALLOC_FAILED_HOOK 0 /** 大于0时启用堆栈溢出检测功能,如果使用此功能 * 用户必须提供一个栈溢出钩子函数,如果使用的话* 此值可以为1或者2,因为有两种栈溢出检测方法 */
#define configCHECK_FOR_STACK_OVERFLOW 0 /********************************************************************FreeRTOS与运行时间和任务状态收集有关的配置选项
**********************************************************************/
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 0 //启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 0
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数* prvWriteNameToBuffer()* vTaskList(),* vTaskGetRunTimeStats()
*/
#define configUSE_STATS_FORMATTING_FUNCTIONS 1 /********************************************************************FreeRTOS与协程有关的配置选项
*********************************************************************/
//启用协程,启用协程以后必须添加文件croutine.c
#define configUSE_CO_ROUTINES 0
//协程的有效优先级数目
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 ) /***********************************************************************FreeRTOS与软件定时器有关的配置选项
**********************************************************************///启用软件定时器
#define configUSE_TIMERS 0
//软件定时器优先级
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
//软件定时器队列长度
#define configTIMER_QUEUE_LENGTH 10
//软件定时器任务堆栈大小
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2) /************************************************************FreeRTOS可选函数配置选项
************************************************************/
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 0
//#define INCLUDE_xTaskGetCurrentTaskHandle 1
//#define INCLUDE_uxTaskGetStackHighWaterMark 0
//#define INCLUDE_xTaskGetIdleTaskHandle 0/******************************************************************FreeRTOS与中断有关的配置选项
******************************************************************/
#ifdef __NVIC_PRIO_BITS#define configPRIO_BITS __NVIC_PRIO_BITS
#else#define configPRIO_BITS 4
#endif
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 //系统可管理的最高中断优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 #define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )/****************************************************************FreeRTOS与中断服务函数有关的配置选项
****************************************************************/
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler/* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */
#if ( configUSE_TRACE_FACILITY == 1 )
#include "trcRecorder.h"
#define INCLUDE_xTaskGetCurrentTaskHandle 1 // 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)
#endif#endif /* FREERTOS_CONFIG_H */![[rust] 10 project, crate, mod, pub, use: 项目目录层级组织, 概念和实战](https://img-blog.csdnimg.cn/direct/6efe237d8eb641bda3e4fd1ea0fef2fc.png)


![[C++] 如何操作ini文件](https://img-blog.csdnimg.cn/direct/57cbbee04db14db39e67eb667b067c1e.png)





![python[6]](https://img-blog.csdnimg.cn/direct/6a2c46b73f214b358be7b65e527cb3ae.png)