目录
概述
1 认识I2C协议
1.1 初识I2C
1.2 I2C物理层
1.3 I2C协议分析
1.3.1 Start、Stop、ACK 信号
1.3.2 I2C协议的操作流程
1.3.3 操作I2C注意的问题
2 linux platform驱动开发
2.1 更新设备树
2.1.1 添加驱动节点
2.1.2 编译.dts
2.1.3 更新板卡中的.dtb
2.2 驱动程序设计要点
2.2.1 match设备节点
2.2.2 读写函数的注意点
2.2.2.1 读函数
2.2.2.1 写函数
3 驱动程序实现
3.1 编写驱动程序
3.2 编写Makefile
3.3 编译驱动
4 测试
4.1 编写测试代码
4.2 编写测试程序的Makefile
4.3 编译和运行测试代码
概述
本文主要详细介绍了I2C的知识,使用linux platform驱动架构开发一个基于i2c接口的驱动程序,其中包括编写和更新设备树文件,搭建驱动架构,编写驱动代码和测试代码。本文还是以AT24C02为例,介绍linux platform驱动下i2c类型设备驱动程序的设计方法。并介绍如何使用read和write函数来实现eeprom的读/写功能。
1 认识I2C协议
1.1 初识I2C
I2C 通讯协议(Inter-Integrated Circuit)是由 Philips 公司开发的一种简单、双向二线制同步串行总线, 只需要两根线即可在连接于总线上的器件之间传送信息。I2C 协议占用引脚特别少, 硬件实现简单, 可扩展型强, 现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
1.2 I2C物理层
I2C 通讯设备之间的常用连接方式
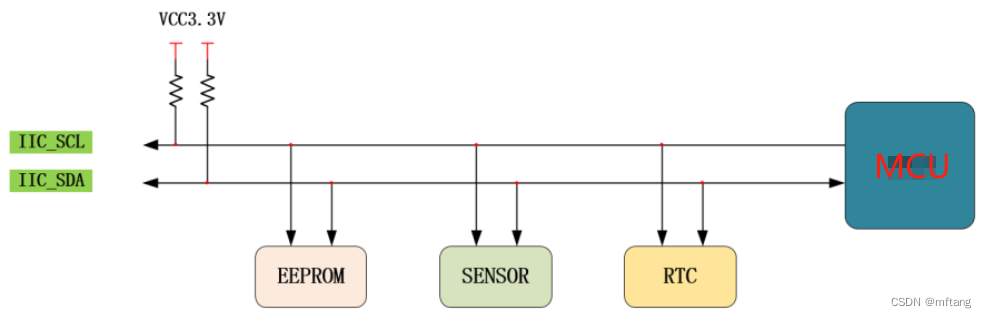
物理层结构有如下特点:
1) 一条I2C总线上可以挂载多个设备,不同的设备地址必须不同
2)I2C总线由两条物理线路构成,分别为SCL和SDA,SCL为同步时钟线,SDA为数据线路
3)I2C可支持3中工作模式:标准模式(100k bit/ s),快速模式( 400k bit/ s),高速模式( 3.4M bit/ s)
1.3 I2C协议分析
完整的I2C工作时序图:

1.3.1 Start、Stop、ACK 信号
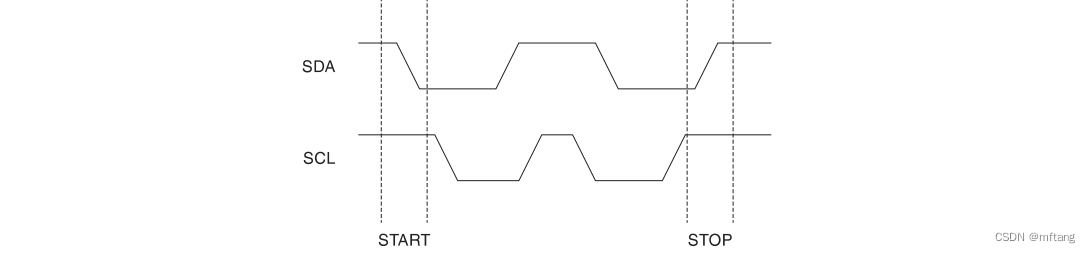
Start信号:
在空闲状态时,SDA为高电平,SCL也为高电平。当有数据需要传输时,Master首先发起start信号,SDA: 1-->0, SCL: 1
Stop信号:
数据传输完成后,SDA: 0-->1, SCL: 1
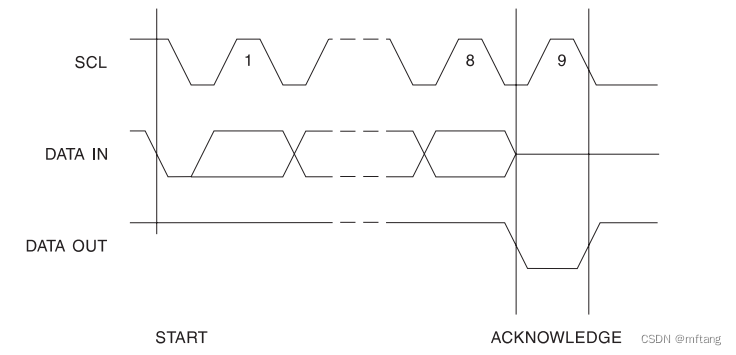
ACK信号:
在I2C协议中,数据传输的单位为byte, 传输完成一个数据时,需要8个bit, 在第9个bit( SCL电平: 0-->1)时,SDA : 0。该信号为ACK信号。
1.3.2 I2C协议的操作流程
需要注意的是I2C协议传输数据以字节为单位,每个字节有8个bit,传输完成一个字节后,还会发发送一个响应信号,即ACK信号,所以,其完成一个byte传输,实际需要9个bit。
Step-1: Master 发起Start信号 , SDA: 1---> 0, SCL: 1
Step-2: 传输数据,当SCL: 0 ->1, SDA发送一个bit,总共8个bit
Step-3: ACK信号,SCL: 0->1, SDA 1->0
Step-4: 传送下一个数据(循环执行: step-2 - > step-3)
Step-5: Master 发起Stop信号,SDA: 0--->1, SCL: 1
1.3.3 操作I2C注意的问题
1)空闲状态时,SDA=1, SCL1 =1
2) SCL 电平 0 ->1变化后,高电平保持期间,SDA上的数据才为有效bit
2 linux platform驱动开发
2.1 更新设备树
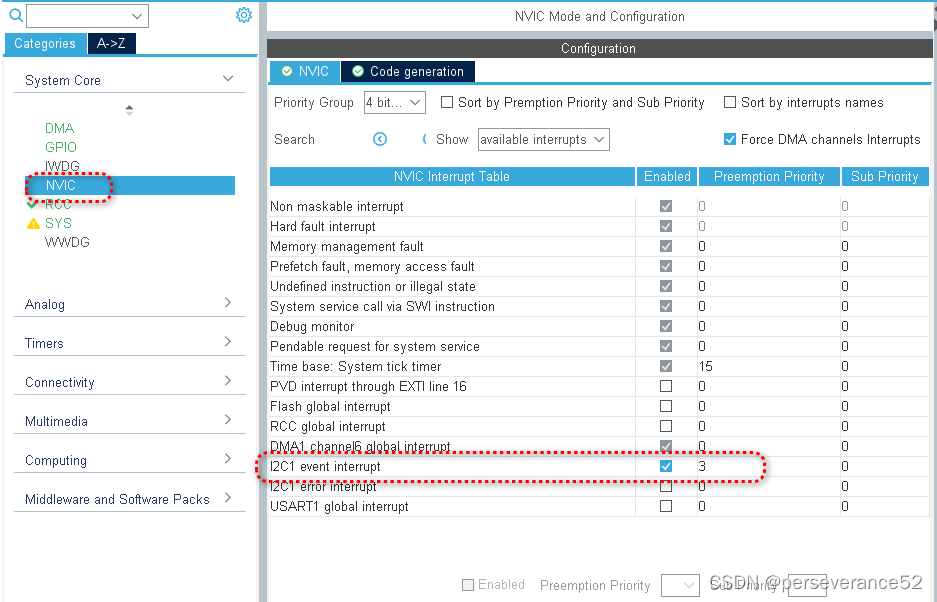
2.1.1 添加驱动节点
AT24C02引脚和IMX.6ULL引脚对应关系:
| AT24C02 IO | IMX.6ULL PIN |
| SCL | I2C2_SCL |
| SDA | I2C2_SDA |
.dts文件路径:/home/mftang/linux_workspace/study_atk_dl6y2c/kernel/atk-dl6u2c/arch/arm/boot/dts/imx6ull-14x14-evk.dts
在.dts文件中添加如下代码:
at24c02: at24c02@50 {compatible = "atk-dl6y2c,at24c02";reg = <0x50>;};
其在imx6ull-14x14-evk.dts中位置:

2.1.2 编译.dts
编译.dts文件,并把编译生成的.dtb文件发送到NFS共享目录下,便于在板卡中操作该文件。
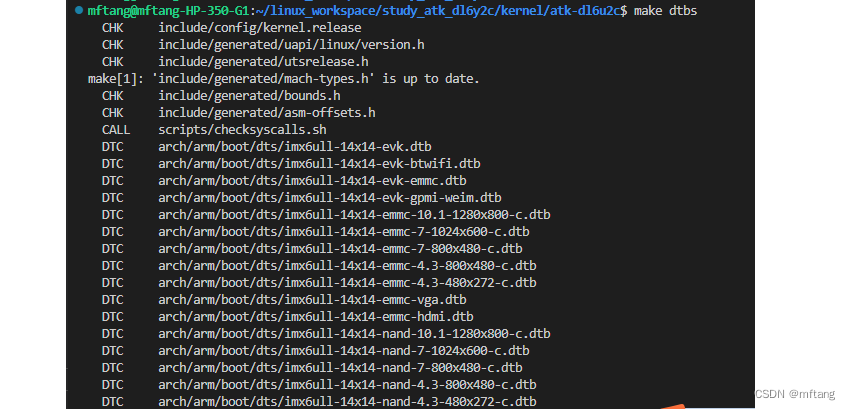
1)在内核根目录下使用如下命令编译.dts文件
make dtbs
2) 复制 .dtb 文件至NFS共享目录
cp arch/arm/boot/dts/imx6ull-14x14-emmc-4.3-480x272-c.dtb /home/mftang/nfs/atk_dl6y2c/

2.1.3 更新板卡中的.dtb
复制.dtb文件到相应的运行目录,然后重新板卡
cp /mnt/atk_dl6y2c/imx6ull-14x14-emmc-4.3-480x272-c.dtb /run/media/mmcblk1p1

reboot板卡后,内核会重新读取.dtb文件。然后在/proc/device-tree目录下查看板卡device tree,使用如下命令:
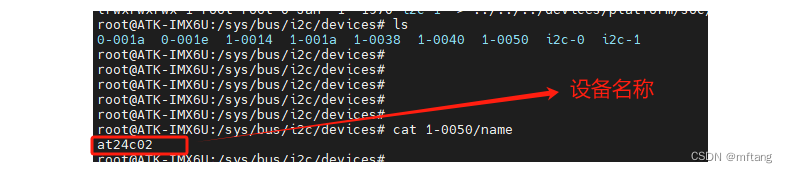
cd /sys/bus/i2c/devices ls

查看地址下设备名称
cat 1-0050/name
2.2 驱动程序设计要点
2.2.1 match设备节点
在板卡的.dts 文件中,定义的设备节点为:

在设备驱动,需要设计相应的匹配表来match该信息,驱动程序的代码如下:
static const struct of_device_id atk_dl6y2c_at24cxx[] = {{ .compatible = "atk-dl6y2c,at24c02" },{ },
};static const struct i2c_device_id at24c02_ids[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};/* platform_driver */
static struct i2c_driver at24cxx_driver = {.probe = at24cxx_probe,.remove = at24cxx_remove,.driver = {.name = "atk_at24cxx",.of_match_table = atk_dl6y2c_at24cxx,},.id_table = at24c02_ids,
};2.2.2 读写函数的注意点
2.2.2.1 读函数
为了实现随机读取EEPROM中的数据,在用户层需要传递一个地址字节,于是该接口设计如下:
int at24cxx_read( unsigned char address, unsigned char *buff, unsigned int len)
{int ret;unsigned char addrbuff[1];struct i2c_msg msg[2];struct i2c_client *client = at24cxxdev.client;addrbuff[0] = address;/* msg[0]为发送要读取的首地址 */msg[0].addr = client->addr; /* at24c02 地址 */msg[0].flags = 0; /* 标记为发送数据 */msg[0].buf = addrbuff; /* 读取的首地址 */msg[0].len = 1; /* reg长度*//* msg[1]读取数据 */msg[1].addr = client->addr; /* at24c02 地址 */msg[1].flags = I2C_M_RD; /* 标记为读取数据*/msg[1].buf = buff; /* 读取数据缓冲区 */msg[1].len = len; /* 要读取的数据长度*/ret = i2c_transfer(client->adapter, msg, 2);mdelay(20);if(ret < 0){printk("i2c rd failed=%d len=%d\n",ret, len);}return ret;
}和设备层相关的read 函数中,使用copy_from_user, 以得到用户层传递进来的参数,具体实现如下:
static ssize_t at24cxx_drv_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{unsigned char tempbuff[size];unsigned char kernel_buf[1];int err, i;unsigned char addr;// get address hereerr = copy_from_user(kernel_buf, buf,1);addr = kernel_buf[0];at24cxx_read( addr, tempbuff, size );size = copy_to_user(buf, tempbuff, size);return size;
}2.2.2.1 写函数
要实现随机写AT24C02内存的功能,就需要写数据时,先传递给它一个地址,然后在写数据,所以在驱动程序是这样实现该功能的:
int at24cxx_write( unsigned char *buff, unsigned int len)
{int ret;struct i2c_msg msg[1];struct i2c_client *client = at24cxxdev.client;/* msg[0]为发送要写的首地址 */msg[0].addr = client->addr; /* at24c02 地址 */msg[0].flags = 0; /* 标记为发送数据 */msg[0].buf = buff; /* 写的首地址 */msg[0].len = len; /* 数据长度*/ret = i2c_transfer(client->adapter, msg, 1);mdelay(20);if(ret < 0) {printk("i2c write failed=%d len=%d\n",ret, len);}return ret;
}和driver 层相关的write函数如下,其中buff中的数据包含两部分:
buf[0] : 为地址信息,
buf[1 ~ n ] :user层要写的data数据:
static ssize_t at24cxx_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{unsigned char kernel_buf[size];int err, i;size = copy_from_user(kernel_buf, buf, size);at24cxx_write(kernel_buf, size );return size;
}3 驱动程序实现
3.1 编写驱动程序
创建一个.c 文件,编写代码。详细驱动代码如下:
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : drv_15_at24cxx.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : at24cxx 驱动程序
其他 : 无
日志 : 初版V1.0 2024/1/30 使用方法:
1) 在.dts文件中定义节点信息at24c02: at24c02@50 {compatible = "atk-dl6y2c,at24c02";reg = <0x50>;};2) 在驱动匹配列表
static const struct of_device_id at24cxx_of_match[] = {{ .compatible = "atk-dl6y2c,at24c02" },{ } // Sentinel
};
***************************************************************/
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ktime.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/irq.h>
#include <linux/wait.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/fcntl.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/i2c.h>#define DEVICE_NAME "at24cxx" // dev/at24cxx/* at24cxxdev设备结构体 */
struct at24cxxstru_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */struct device_node *node; /* at24cxx设备节点 */struct i2c_client *client;
};/* read or write at24cxx structure */static struct at24cxxstru_dev at24cxxdev;/*at24cxx driver
*/
int at24cxx_read( unsigned char address, unsigned char *buff, unsigned int len)
{int ret;unsigned char addrbuff[1];struct i2c_msg msg[2];struct i2c_client *client = at24cxxdev.client;addrbuff[0] = address;/* msg[0]为发送要读取的首地址 */msg[0].addr = client->addr; /* at24c02 地址 */msg[0].flags = 0; /* 标记为发送数据 */msg[0].buf = addrbuff; /* 读取的首地址 */msg[0].len = 1; /* reg长度*//* msg[1]读取数据 */msg[1].addr = client->addr; /* at24c02 地址 */msg[1].flags = I2C_M_RD; /* 标记为读取数据*/msg[1].buf = buff; /* 读取数据缓冲区 */msg[1].len = len; /* 要读取的数据长度*/ret = i2c_transfer(client->adapter, msg, 2);mdelay(20);if(ret < 0){printk("i2c rd failed=%d len=%d\n",ret, len);}return ret;
}int at24cxx_write( unsigned char *buff, unsigned int len)
{int ret;struct i2c_msg msg[1];struct i2c_client *client = at24cxxdev.client;/* msg[0]为发送要写的首地址 */msg[0].addr = client->addr; /* at24c02 地址 */msg[0].flags = 0; /* 标记为发送数据 */msg[0].buf = buff; /* 写的首地址 */msg[0].len = len; /* 数据长度*/ret = i2c_transfer(client->adapter, msg, 1);mdelay(20);if(ret < 0) {printk("i2c write failed=%d len=%d\n",ret, len);}return ret;
}/*linux driver 驱动接口: 实现对应的open/read/write等函数,填入file_operations结构体
*/
static ssize_t at24cxx_drv_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{unsigned char tempbuff[size];unsigned char kernel_buf[1];int err, i;unsigned char addr;// get address hereerr = copy_from_user(kernel_buf, buf,1);addr = kernel_buf[0];at24cxx_read( addr, tempbuff, size );size = copy_to_user(buf, tempbuff, size);return size;
}static ssize_t at24cxx_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{unsigned char kernel_buf[size];int err, i;size = copy_from_user(kernel_buf, buf, size);at24cxx_write(kernel_buf, size );return size;
}static int at24cxx_drv_close(struct inode *node, struct file *file)
{printk(" %s line %d \r\n", __FUNCTION__, __LINE__);return 0;
}static int at24cxx_drv_open(struct inode *inode, struct file *filp)
{return 0;
}/* 定义driver的file_operations结构体
*/
static struct file_operations at24cxx_fops = {.owner = THIS_MODULE,.read = at24cxx_drv_read,.write = at24cxx_drv_write,.open = at24cxx_drv_open,.release = at24cxx_drv_close,
};/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int at24cxx_probe( struct i2c_client *client, const struct i2c_device_id *id )
{printk("at24cxx driver and device was matched!\r\n");/* 1. 获得硬件信息 */at24cxxdev.client = client;/* register file_operations */at24cxxdev.major = register_chrdev( 0, DEVICE_NAME, /* device name */&at24cxx_fops); /* create the device class */at24cxxdev.class = class_create(THIS_MODULE, "at24cxx_class");if (IS_ERR(at24cxxdev.class)) {printk("%s line %d\n", __FUNCTION__, __LINE__);unregister_chrdev( at24cxxdev.major, DEVICE_NAME);return PTR_ERR( at24cxxdev.class );}/* 2. device_create */device_create( at24cxxdev.class, NULL, MKDEV( at24cxxdev.major, 0 ), NULL, DEVICE_NAME); // device name return 0;
}static int at24cxx_remove(struct i2c_client *client)
{printk("%s line %d\n", __FUNCTION__, __LINE__);device_destroy( at24cxxdev.class, MKDEV( at24cxxdev.major, 0));class_destroy(at24cxxdev.class);unregister_chrdev(at24cxxdev.major, DEVICE_NAME);return 0;
}static const struct of_device_id atk_dl6y2c_at24cxx[] = {{ .compatible = "atk-dl6y2c,at24c02" },{ },
};static const struct i2c_device_id at24c02_ids[] = {{ "xxxxyyy", (kernel_ulong_t)NULL },{ /* END OF LIST */ }
};/* 1. 定义platform_driver */
static struct i2c_driver at24cxx_driver = {.probe = at24cxx_probe,.remove = at24cxx_remove,.driver = {.name = "atk_at24cxx",.of_match_table = atk_dl6y2c_at24cxx,},.id_table = at24c02_ids,
};/* 2. 在入口函数注册platform_driver
*/
static int __init at24cxx_init(void)
{int err;printk("%s line %d\n",__FUNCTION__, __LINE__);err = i2c_add_driver(&at24cxx_driver); return err;
}/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数* 卸载platform_driver*/
static void __exit at24cxx_exit(void)
{printk("%s line %d\n", __FUNCTION__, __LINE__);i2c_del_driver(&at24cxx_driver);
}/*4. 驱动入口和出口函数
*/
module_init(at24cxx_init);
module_exit(at24cxx_exit);MODULE_LICENSE("GPL");
MODULE_AUTHOR("tangmingfei2013@126.com");
3.2 编写Makefile
在驱动程序的同级目录下创建Makefile文件,然后编写代码
PWD := $(shell pwd)KERNEL_DIR=/home/mftang/linux_workspace/study_atk_dl6y2c/kernel/atk-dl6u2c
ARCH=arm
CROSS_COMPILE=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-export ARCH CROSS_COMPILEobj-m:= drv_15_at24cxx.oall:$(MAKE) -C $(KERNEL_DIR) M=$(PWD) modulesclean:rm -rf .*.cmd *.o *.mod.c *.ko .tmp_versions *.order *.symvers3.3 编译驱动
使用Make命令编译驱动程序,然后将生成的.ko文件copy到NFS共享目录下,然后在板卡中安装该驱动。

使用 insmod 安装该驱动,安装成功后,会出现如下信息:

4 测试
编写一个测试程序,实现AT24CXX连续数据的读写功能
4.1 编写测试代码
创建一个.c文件,编写如下代码:
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : test_15_at24cxx.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : 测试at24cxx驱动程序
其他 : 无
日志 : 初版V1.0 2024/02/15
***************************************************************/
#include <sys/types.h>
#include <sys/stat.h>
#include <linux/types.h>
#include <linux/i2c-dev.h>
#include <linux/i2c.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <fcntl.h>
#include <stdlib.h>
#include <linux/fs.h>
#include <unistd.h>
#include <errno.h>
#include <assert.h>
#include <string.h>
#include <time.h>#define DEV_FILE "/dev/at24cxx"int main(void)
{int fd, ret;int i = 0;unsigned char databuff[9];unsigned char rdatabuff[8];fd = open(DEV_FILE, O_RDWR);if (fd == -1){printf("can not open file: %s \n", DEV_FILE);return -1;}printf("write to at24cxx: \r\n ");for( i=0; i< sizeof(databuff); i++ ){databuff[i] = i;printf(" %x \t ", databuff[i]);}printf(" \r\n \r\n ");ret = write(fd, databuff, sizeof(databuff)); if( ret < 0 ){printf("%d %s %s i2c device write data failure: %s\n",__LINE__, __FILE__, __FUNCTION__, strerror(errno));close(fd);return -1;}rdatabuff[0] = 0; // 读数据,起始地址ret = read( fd, rdatabuff, sizeof(rdatabuff));if( ret < 0 ){printf("%d %s %s i2c device read data failure: %s\n",__LINE__, __FILE__, __FUNCTION__, strerror(errno));close(fd);return -1;}printf("read from at24cxx: \r\n ");for( i=0; i< sizeof(rdatabuff); i++ ){printf(" %x \t ", rdatabuff[i]);}printf(" \r\n \r\n ");close(fd);return 0;
}4.2 编写测试程序的Makefile
在测试程序的同级目录下创建一个Makefile文件,实现如下代码:
CFLAGS= -Wall -O2
CC=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc
STRIP=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-striptest_15_at24cxx: test_15_at24cxx.o$(CC) $(CFLAGS) -o test_15_at24cxx test_15_at24cxx.o$(STRIP) -s test_15_at24cxxclean:rm -f test_15_at24cxx test_15_at24cxx.o4.3 编译和运行测试代码
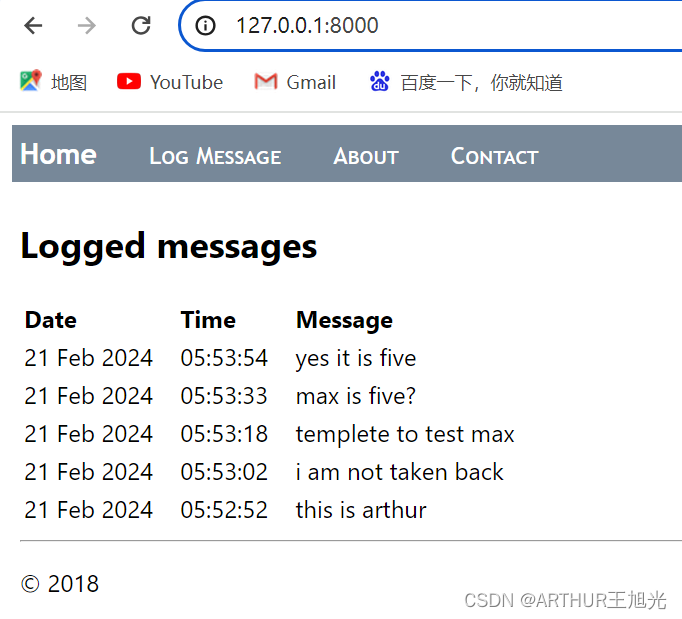
使用make编译测试代码,然后将生成的可执行文件copy到NFS的共享目录下。在板卡中运行该测试程序:
运行该程序后可以看见: