AVR 328pb ADC基本介绍和使用
- 📍结合参考同架构lgt8f328p中文文档:http://www.prodesign.com.cn/wp-content/uploads/2023/03/LGT8FX8P_databook_v1.0.4.pdf
📘328pb ADC特性
• 10-bit Resolution 10位分辨率
• 0.5 LSB Integral Non-linearity 0.5 LSB积分非线性
• ± 2 LSB Absolute Accuracy ±2 LSB绝对精度
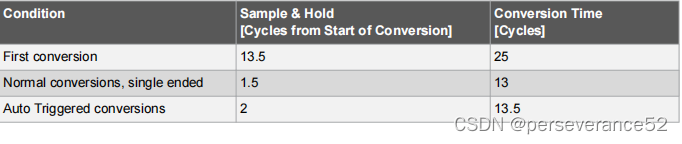
• 13 - 260 μs Conversion Time 13-260μs转换时间
• Up to 76.9 kSPS (Up to 15 kSPS at Maximum Resolution) 高达76.9 kSPS(最大分辨率高达15 kSPS)
• 6 Multiplexed Single Ended Input Channels 6个多路复用单端输入通道
• 2 Additional Multiplexed Single Ended Input Channels (TQFP and QFN/MLF Package only) 2个额外的多路复用单端输入通道(仅限TQFP和QFN/MLF封装)
• Temperature Sensor Input Channel 温度传感器输入通道
• Optional Left Adjustment for ADC Result Readout ADC结果读数的可选左调整
• 0 - VCC ADC Input Voltage Range ADC结果读出的可选左调整0 - VCC
• Selectable 1.1V ADC Reference Voltage 可选1.1V ADC参考电压
• Free Running or Single Conversion Mode 自由运行或单次转换模式
• Interrupt on ADC Conversion Complete ADC转换完成时中断
• Sleep Mode Noise Canceler 睡眠模式降噪器
-
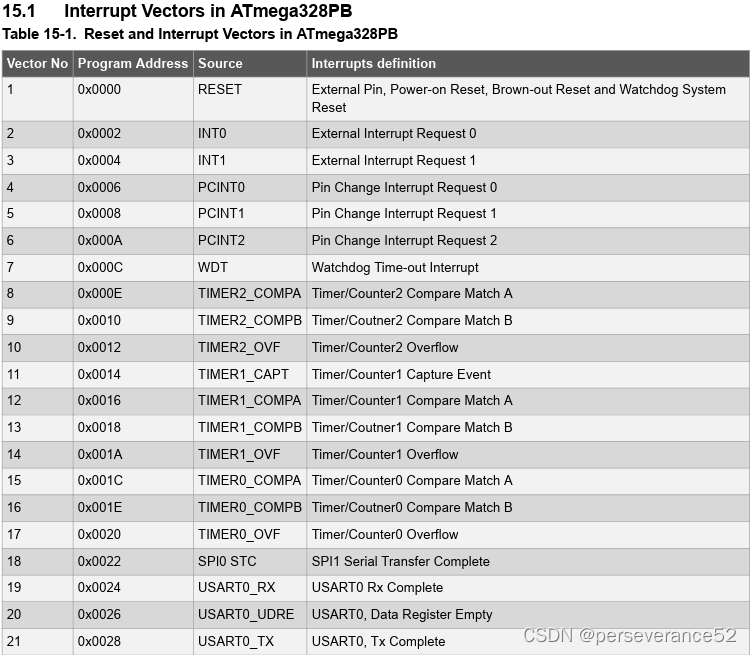
🍁中断向量表:
-
ADC模数转换器块原理图
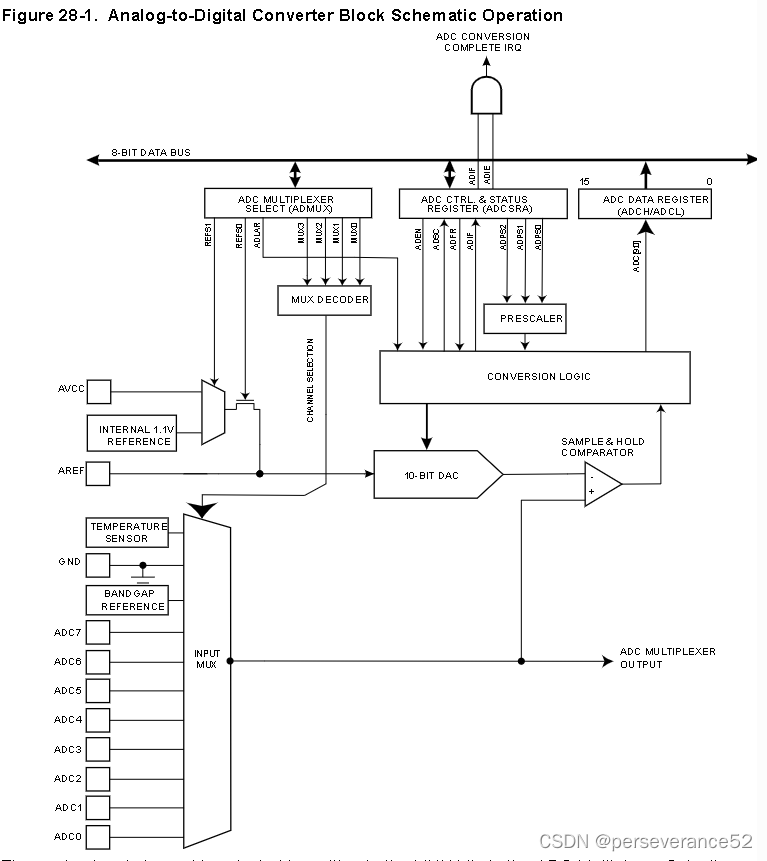
-
ADC自动触发逻辑
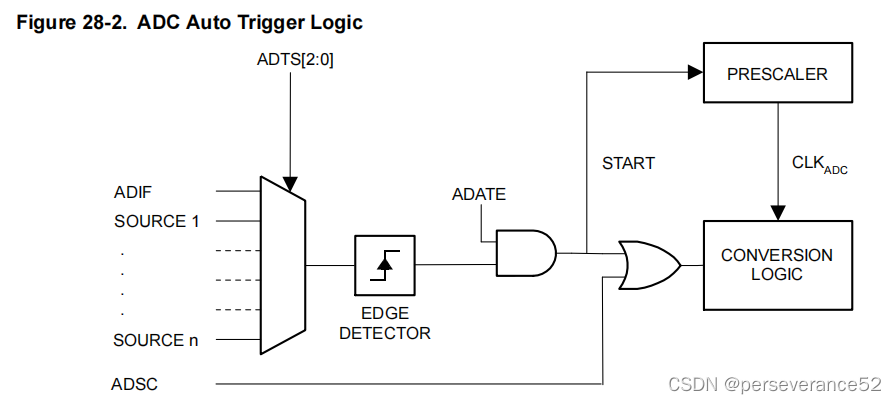
-
ADC转换和分频

默认情况下,逐次近似电路需要一个输入频率在50 kHz和200 kHz之间的时钟频率,以获得最大分辨率。如果需要低于10位的分辨率,则对ADC的输入时钟频率可以高于200 kHz,以获得更高的采样率。 -
ADC时序图,第一次转换(单次转换模式)
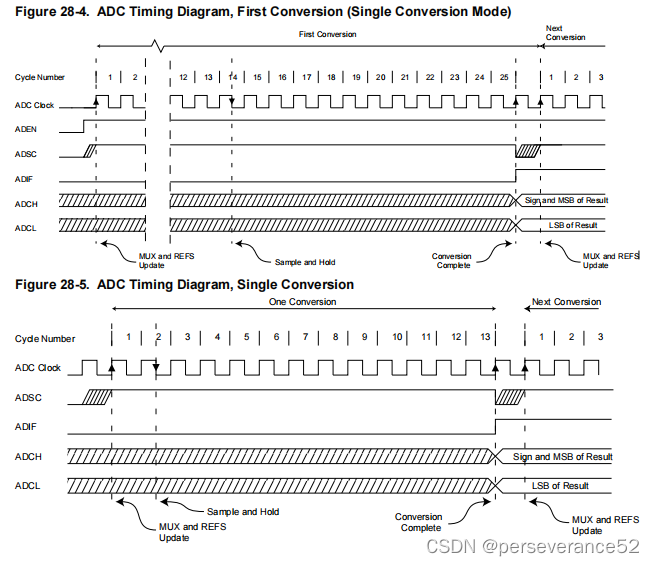
-
ADC定时图,自动触发转换
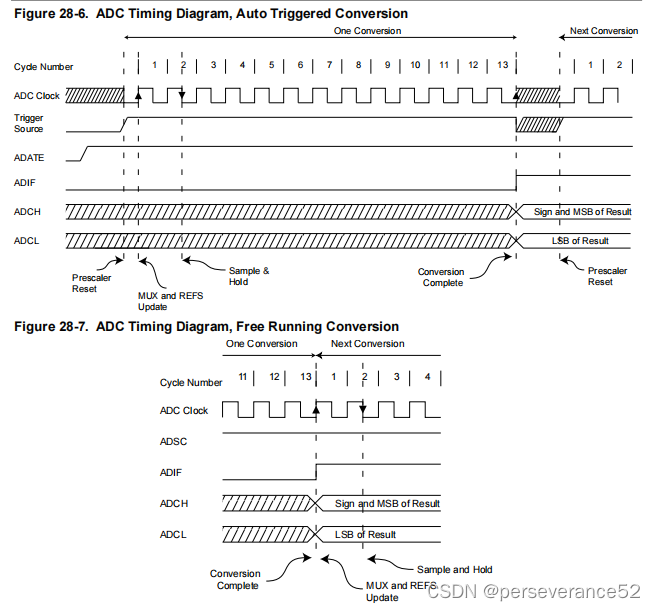
- ⌛ADC转换时间
📓ADC 参考电压
ADC的参考电压(VREF)表示ADC的转换范围。超过VREF的单端通道将导致代码接近0x3FF。VREF可以选择为AVCC、内部1.1V参考或外部AREF引脚。
📘ADC 相关寄存器
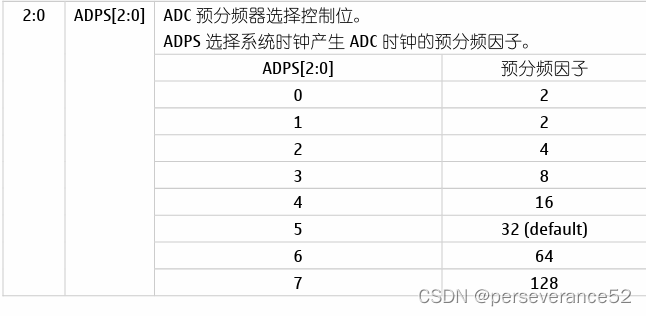
- 🌿ADC多路复用器选择寄存器:ADMUX
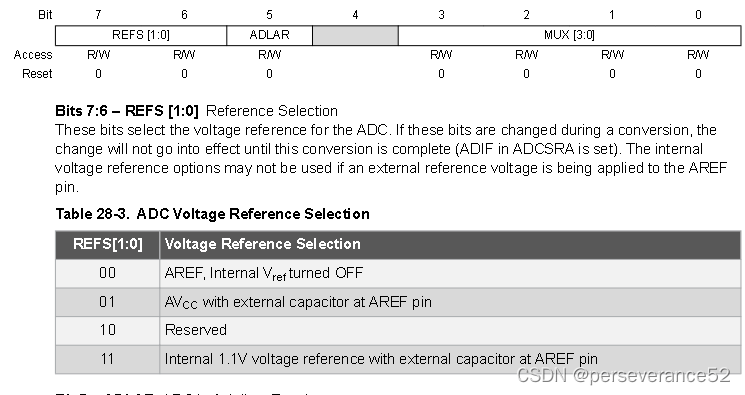
- 🔖6-7位决定ADC参考电压选择。
位5-ADLAR: ADC左调整结果ADLAR位影响ADC转换结果在ADC数据寄存器中的呈现。向左写入一个ADLAR调整结果。否则,结果右调整。更改ADLAR位将立即影响ADC数据寄存器,而不管任何正在进行的转换。有关该位的完整描述,请参阅ADCL和ADCH。
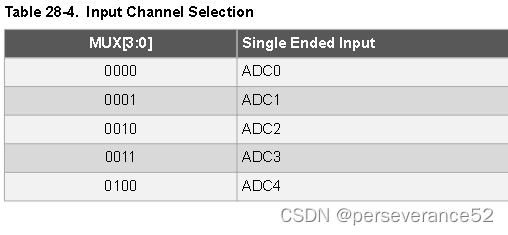
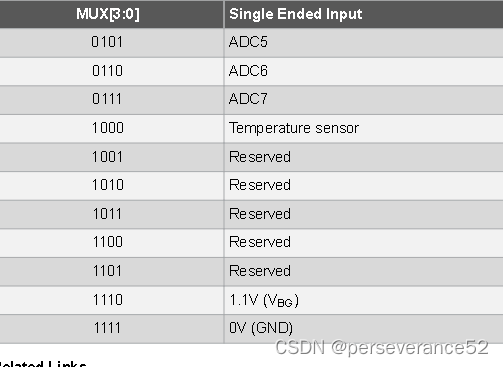
位3:0-MUX[3:0]:模拟通道选择这些位的值选择哪些模拟输入连接到ADC。如果在转换期间更改了这些位,则在此转换完成之前更改不会生效。
-
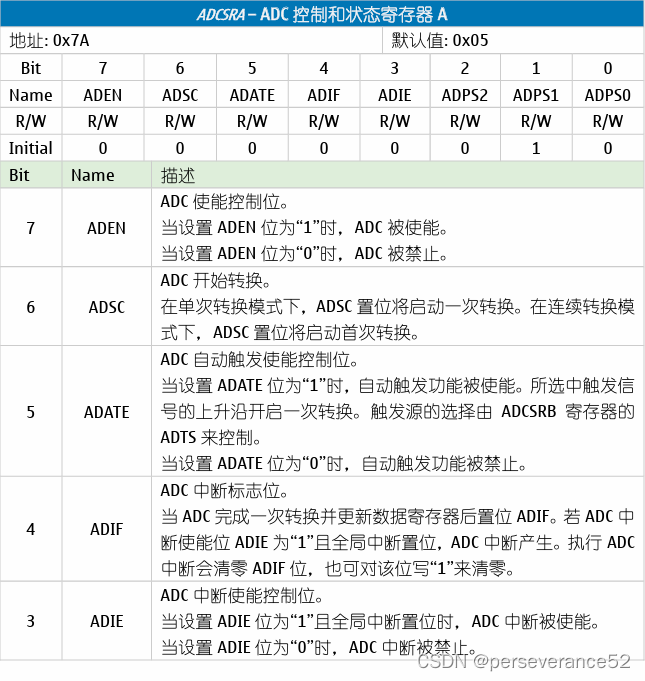
ADC控制和状态寄存器A:ADCSRA
-
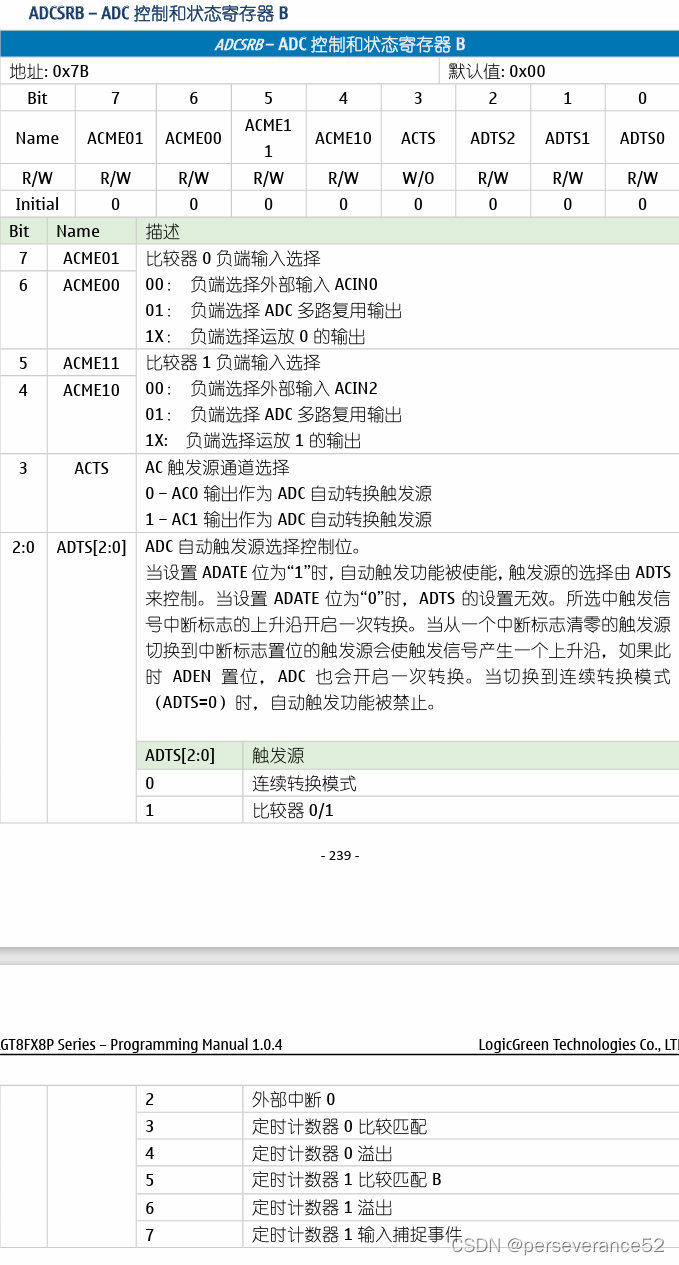
ADC控制和状态寄存器B:ADCSRB
-
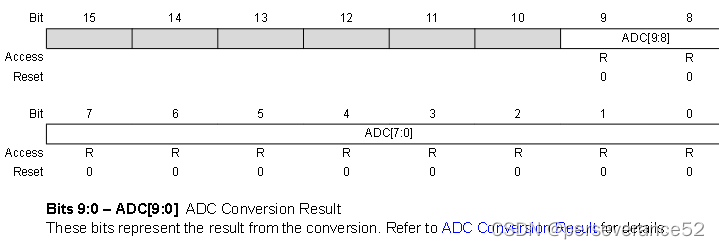
ADC数据寄存器低字节和高字节(ADLAR=0):ADCL and ADCH
ADCL和ADCH寄存器对代表16位值,ADC数据寄存器。低字节[7:0](后缀L)可在原始偏移量处访问。高字节[15:8](后缀H)可在偏移量+0x01处访问。有关读取和写入16位寄存器的更多详细信息,请参阅访问16位定时器/计数器寄存器。当ADC转换完成时,结果在这两个寄存器中找到。当读取ADCL时,ADC数据寄存器不会更新,直到读取ADCH。因此,如果结果保持调整,并且不需要超过8位精度,则读取ADCH就足够了。否则,必须先读取ADCL,然后再读取ADCH。ADLAR位和ADMUX中的MUXn位会影响从寄存器读取结果的方式。如果设置了ADLAR(ADLAR=1),则结果向左调整。如果ADLAR被清除(ADLAR=0,这是默认值),则结果向右调整。
-
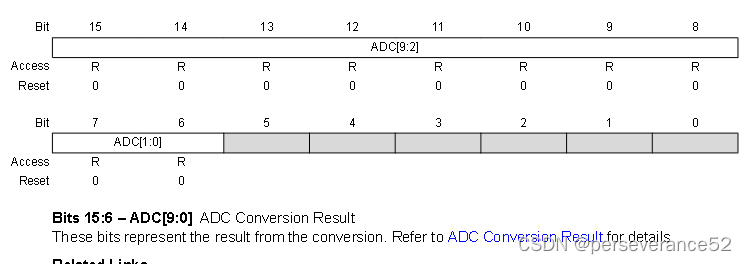
ADC数据寄存器低字节和高字节(ADLAR=1):(ADCL and ADCH)
ADCL和ADCH寄存器对代表16位值,ADC数据寄存器。低字节[7:0](后缀L)可在原始偏移量处访问。高字节[15:8](后缀H)可在偏移量+0x01处访问。有关读取和写入16位寄存器的更多详细信息,请参阅访问16位定时器/计数器寄存器。当ADC转换完成时,结果在这两个寄存器中找到。当读取ADCL时,ADC数据寄存器不会更新,直到读取ADCH。因此,如果结果保持调整,并且不需要超过8位精度,则读取ADCH就足够了。否则,必须先读取ADCL,然后再读取ADCH。ADLAR位和ADMUX中的MUXn位会影响从寄存器读取结果的方式。如果设置了ADLAR(ADLAR=1),则结果向左调整。如果ADLAR被清除(ADLAR=0,这是默认值),则结果向右调整。
📗测试例程
- 📝例程采用AREF引脚的使用5V供电电压作为参考。采集通道0(PC0引脚)输入电压值。
//官方ADC例程编号:AN17644 Getting STARTED with AVR
#include "atmel_start.h"#include <util/delay.h>
#include <avr/sleep.h>
#include <avr/power.h>
#include <avr/interrupt.h>
#include <avr/wdt.h>
#include "stdio.h"uint16_t adc_res = 0;/**************************************************************
PIN change interrupt ISR
LED toggle code is commented as LED dimming code has been added in main
****************************************************************/ISR(PCINT0_vect)
{// if (!(PINB & (1<<PINB7))) // if PINB7 is low (Switch pressed)// {// PORTB |= (1<<PORTB5); // Turn ON LED// }// else// {// PORTB &= ~(1<<PORTB5); // Turn OFF LED// }
}uint16_t ReadADC(uint8_t ADCchannel)
{// select ADC channel with safety maskADMUX = (ADMUX & 0xF0) | (ADCchannel & 0x0F);//// single conversion modeADCSRA |= (1 << ADSC);// wait until ADC conversion is completewhile (ADCSRA & (1 << ADSC));return ADC;
}
void optimize_power_consumption()
{DIDR0 |= 0xC0; /*ADC7D and ADC6D are undefined in header file so set bits this way*//* Disable digital input buffer on Analog comparator pins */DIDR1 |= (1 << AIN1D) | (1 << AIN0D);/* Disable Analog Comparator */ACSR |= (1 << ACD);/*Watchdog Timer OFF*//* Disable interrupts */cli();/* Reset watchdog timer */wdt_reset();/* Clear WDRF in MCUSR */MCUSR &= ~(1 << WDRF);/* Turn off WDT */WDTCSR = 0x00;/* Set sleep mode */set_sleep_mode(SLEEP_MODE_PWR_DOWN);
}int main(void)
{system_init();optimize_power_consumption();TIMSK1 |= (1 << OCIE1A); // Enable output compare match A interruptPCMSK0 |= (1 << PCINT7); // Enable Pin Change Interrupt 7PCICR |= (1 << PCIE0); // Enable the interrupt enable bit for PCINTsei();while (1){ADCSRA &= ~(1 << ADEN);//禁用ADCpower_adc_disable();sleep_mode();power_adc_enable();//AVCC AREF使用5V供电电压作为参考ADCSRA |= (1 << ADEN);//使能ADCadc_res = ReadADC(0);//通道0:PC0printf("adc_value:%d",adc_res);_delay_ms(1000);LED_toggle_level();}return 0;
}- 裸机ADC0测试代码
/** USART_PRINTF.c** Created: 2024/2/8 19:50:27* Author : Administrator*/#include <avr/io.h>
#include "util/delay.h"
//#include "util/setbaud.h"
#include "avr/sfr_defs.h"//包含loop_until_bit_is_set函数
#include "avr/interrupt.h"
// Standard Input/Output functions
#include <stdio.h>// Voltage Reference: AVCC pin
#define ADC_VREF_TYPE ((0<<REFS1) | (1<<REFS0) | (0<<ADLAR))// Read the AD conversion result
unsigned int ReadADC(unsigned char adc_input)
{ADMUX=adc_input | ADC_VREF_TYPE;// Delay needed for the stabilization of the ADC input voltage_delay_us(10);// Start the AD conversionADCSRA|=(1<<ADSC);// Wait for the AD conversion to completewhile ((ADCSRA & (1<<ADIF))==0);ADCSRA|=(1<<ADIF);return ADCW;
}// ADC initialization
void ADC_Init(void)
{// ADC Clock frequency: 125.000 kHz// ADC Voltage Reference: AVCC pin// ADC Auto Trigger Source: Free Running// Digital input buffers on ADC0: Off, ADC1: On, ADC2: On, ADC3: On// ADC4: On, ADC5: On, ADC6: On, ADC7: OnDIDR0=(0<<ADC7D) | (0<<ADC6D) | (0<<ADC5D) | (0<<ADC4D) | (0<<ADC3D) | (0<<ADC2D) | (0<<ADC1D) | (1<<ADC0D);ADMUX=ADC_VREF_TYPE;ADCSRA=(1<<ADEN) | (0<<ADSC) | (1<<ADATE) | (0<<ADIF) | (0<<ADIE) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0);ADCSRB=(0<<ADTS2) | (0<<ADTS1) | (0<<ADTS0);// Ensure that the ADC is enabledPRR0&= ~(1<<PRADC);
}static int uart_putchar(char c, FILE *stream)
{// if (c == '\n')// uart_putchar('\r', stream);// loop_until_bit_is_set(UCSR0A, UDRE0);//需包含:avr/sfr_defs.h// /* Wait for empty transmit buffer */while ( !( UCSR0A & (1<<UDRE0)) );UDR0 = c;return 0;
}// 配置输出流
static FILE mystdout = FDEV_SETUP_STREAM(uart_putchar, NULL,_FDEV_SETUP_WRITE);
//static FILE USART0_stream = FDEV_SETUP_STREAM(NULL, uart_getchar, _FDEV_SETUP_RW);//#define BAUD 9600
#define F_CPU 16000000UL
#define MYUBRR (F_CPU/16/BAUD-1)// 串口初始化
void USART0_Init(void)
{UCSR0A=(0<<RXC0) | (0<<TXC0) | (0<<UDRE0) | (0<<FE0) | (0<<DOR0) | (0<<UPE0) | (0<<U2X0) | (0<<MPCM0);/*Enable receiver and transmitter */UCSR0B=(1<<RXCIE0) | (0<<TXCIE0) | (0<<UDRIE0) | (1<<RXEN0) | (1<<TXEN0) | (0<<UCSZ02) | (0<<RXB80) | (0<<TXB80);/* Set frame format: 8data, 1stop bit */UCSR0C=(0<<UMSEL01) | (0<<UMSEL00) | (0<<UPM01) | (0<<UPM00) | (0<<USBS0) | (1<<UCSZ01) | (1<<UCSZ00) | (0<<UCPOL0);/*Set baud rate */UBRR0H = (unsigned char)(MYUBRR>>8);UBRR0L = (unsigned char)MYUBRR;stdout = &mystdout;//输出流配置// Ensure that the USART0 is enabledPRR0&= ~(1<<PRUSART0);// Globally enable interruptssei();}
void USART_Transmit( unsigned char data )
{/* Wait for empty transmit buffer */while ( !( UCSR0A & (1<<UDRE0)) );/* Put data into buffer, sends the data */UDR0 = data;
}unsigned char USART_Receive( void )
{/* Wait for data to be received */while ( !(UCSR0A & (1<<RXC0)) );/* Get and return received data from buffer */return UDR0;
}void SYS_Clock_Init()
{CLKPR=(1<<CLKPCE);CLKPR=(0<<CLKPCE) | (0<<CLKPS3) | (0<<CLKPS2) | (0<<CLKPS1) | (0<<CLKPS0);
}int main(void)
{/* Replace with your application code */unsigned int adc_res;SYS_Clock_Init();USART0_Init();DDRB = PINB5;//配置PB5为输出模式ADC_Init();//ADC initializationwhile (1){PORTB ^= (1 << PINB5);//PB5状态翻转_delay_ms(1000); // 使用util/delay.h中的宏函数来实现1毫秒的延时adc_res = ReadADC(0);//通道0:PC0printf("adc_value:%d",adc_res);}
}