1、 摄像机/观察空间
以摄像机的视角作为场景原点时场景中所有的顶点坐标:观察矩阵把所有的世界坐标变换为相对于摄像机位置与方向的观察坐标。要定义一个摄像机,需要它在世界空间中的位置、观察的方向、一个指向它右侧的向量以及一个指向它上方的向量。实际上创建了一个三个单位轴相互垂直的、以摄像机的位置为原点的坐标系。
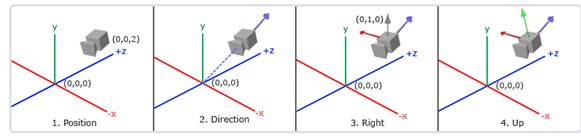
2、 摄像机位置
获取摄像机位置很简单。摄像机位置简单来说就是世界空间中一个指向摄像机位置的向量。
glm::vec3 cameraPos = glm::vec3(0.0f,0.0f,3.0f);
注: z轴是从屏幕指向我们的,如果我们希望摄像机向后移动,我们就沿着z轴的正方向移动。
3、 摄像机方向
摄像机的方向,指的是摄像机指向的方向。根据向量相减得到的向量的方向可以知道,用场景原点减去摄像机位置向量的结果就是摄像机的指向向量。
glm::vec3 cameraTarget = glm::vec3(0.0f,0.0f,0.0f);
glm::vec3 cameraDirection = glm::normalize(cameraPos-cameraTarget);
4、 右轴
一个右向量(Right Vector)代表摄像机空间的x轴的正方向。右向量通过上向量与摄像机指向向量叉乘获得。两个向量叉乘的结果会同时垂直于两向量,因此我们会得到指向x轴正方向的那个向量(如果我们交换两个向量叉乘的顺序就会得到相反的指向x轴负方向的向量):
glm::vec3 up = glm::vec3(0.0f,1.0f,0.0f);
glm::vec3 cameraRight = glm::normalize(glm::cross(up,cameraDirection));
5、 上轴
把右向量和方向向量进行叉乘:
glm::vec3 cameraUp = glm::cross(cameraDirection,cameraRight);
6、 LookAt矩阵
使用矩阵的好处之一是如果你使用3个相互垂直(或非线性)的轴定义了一个坐标空间,你可以用这3个轴外加一个平移向量来创建一个矩阵,并且你可以用这个矩阵乘以任何向量来将其变换到那个坐标空间。上面描述了3个相互垂直的轴和一个定义摄像机空间的位置坐标,现在可以创建LookAt矩阵:
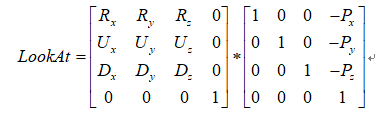
其中R是右向量,U是上向量,D是方向向量,P是摄像机位置。注意,位置向量是相反的,因为我们最终希望把世界平移到与我们自身移动的相反方向。把这个LookAt矩阵作为观察矩阵可以很高效地把所有世界坐标变换到刚刚定义的观察空间。LookAt矩阵就像它的名字表达的那样:它会创建一个看着(Look at)给定目标的观察矩阵。
使用GLM创建LookAt矩阵,把它当作观察矩阵。
glm::mat4 view;
view = glm::lookAt(glm::vec3(0.0f,0.0f,3.0f),
glm::vec3(0.0f,0.0f,0.0f),
glm::vec3(0.0f,1.0f,0.0f));
learnOpenGL_07_摄像机
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://xiahunao.cn/news/1549929.html
如若内容造成侵权/违法违规/事实不符,请联系瞎胡闹网进行投诉反馈,一经查实,立即删除!相关文章

AWS助理架构师认证培训实操练习 | How to SSH using Windows
视频来源:B站《AWS 认证解决方案架构师 助理级 SAA-C03》
一边学习一边整理老师的课程内容及试验笔记,并与大家分享,侵权即删,谢谢支持!
附上汇总贴:AWS助理架构师认证培训实操练习 | 汇总_热爱编程的通信…

supervisord初体验
Supervisor是一个客户端/服务器系统,允许其用户监视和控制类似UNIX的操作系统上的许多进程。
安装 1.supervisord是python的一个库可以直接用过pip来进行安装
pip install supervisor2.如果没有pip可以在PyPi[https://pypi.org/project/supervisor/]上下载supervi…

AWS助理架构师认证培训实操练习 | IAM Policies Hands on
视频来源:B站《AWS 认证解决方案架构师 助理级 SAA-C03》
一边学习一边整理老师的课程内容及试验笔记,并与大家分享,侵权即删,谢谢支持!
附上汇总贴:AWS助理架构师认证培训实操练习 | 汇总_热爱编程的通信…

AWS助理架构师认证培训实操练习 | IAM MFA Hands On
视频来源:B站《AWS 认证解决方案架构师 助理级 SAA-C03》
一边学习一边整理老师的课程内容及试验笔记,并与大家分享,侵权即删,谢谢支持!
附上汇总贴:AWS助理架构师认证培训实操练习 | 汇总_热爱编程的通信…
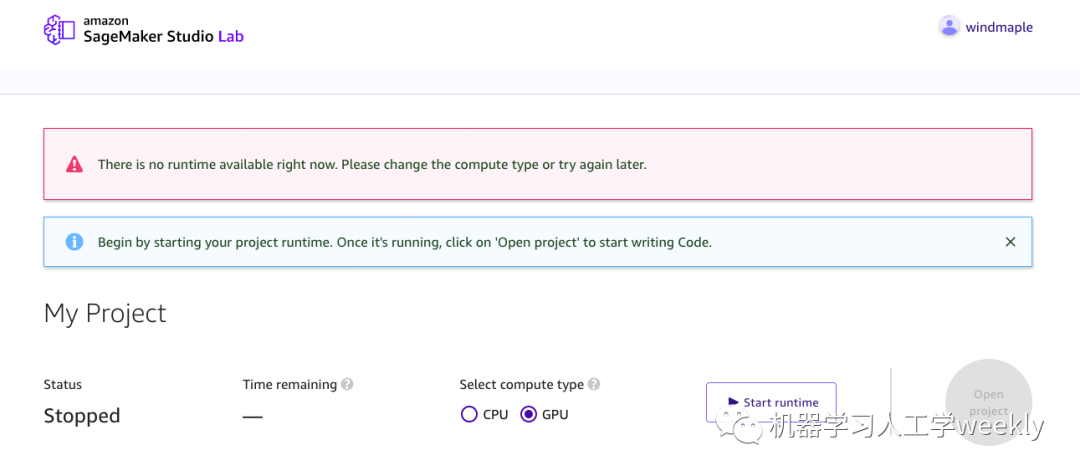
AWS SageMaker Studio Lab免费的机器福利利用起来~
国内无法访问Google Colab,所以有时候跑Python notebook比较麻烦,得倒腾到本地,如果自己的机器(比如笔记本)性能不行的话跑起来也很痛苦
现在有了免费的羊毛,AWS SageMaker Studio Lab,国内可用…

AWS助理架构师认证培训实操练习 | IAM Roles Hands On
视频来源:B站《AWS 认证解决方案架构师 助理级 SAA-C03》
一边学习一边整理老师的课程内容及试验笔记,并与大家分享,侵权即删,谢谢支持!
附上汇总贴:AWS助理架构师认证培训实操练习 | 汇总_热爱编程的通信…

【笔记】MySQL行转列函数
GROUP_CONCAT()函数
创建表person_info,并插入数据 CREATE TABLE person_info (id bigint(20) NOT NULL AUTO_INCREMENT,name varchar(100) DEFAULT NULL,family varchar(100) DEFAULT NULL,PRIMARY KEY (id)
) ENGINEInnoDB AUTO_INCREMENT8 DEFAULT CHARSETutf8;…

谷粒商城环境搭建二:开发环境统一
开发环境配置统一
Maven配置
查看maven信息 修改配置文件:apache-maven-3.3.9\conf\settings.xml# 配置阿里云镜像
<mirrors><mirror><id>nexus-aliyun</id><mirrorOf>central</mirrorOf><name>Nexus aliyun</name&…

htc hd2连上wifi却显示无法连接服务器,HTC HD2线刷官方ROM疑难问题解答
HTC HD2线刷官方ROM更新实用程序 (RUU)需要注意哪些问题呢?安致小编在这里为大家整理这篇 《HTC HD2线刷官方ROM疑难问题解答》,希望对大家线刷官方RUU有所帮助。 开始准备: 运行 ROM 更新实用程序 (RUU) 前,请确认下列事项: 1.An…
提取官方原生(RUU/.exe)ROM刷机文件
官方ROM提取刷机文件结构主要为: android-info.txt,boot.img,hboot_*.nb0,radio.img,rcdata.img,recovery.img,splash1.nb0,system.img,userdata.img 官方(.exe)ROM提取过…

HTC One V卡刷RUU准备工作 图文教程详解
为什么80%的码农都做不了架构师?>>> HTC One V卡刷RUU准备工作 图文教程详解 相对于线刷,HTC One V卡刷RUU更为方便快捷,不会和普通RUU那样这么容易出错,不必害怕刷机中发生断电等意外事故,也可以重启或者…
![Elasticsearch-8.x.x安装启动后测试报错[WARN ][o.e.x.s.t.n.SecurityNetty4HttpServerTransport] [DESKTOP-0QU7RUU]](https://img-blog.csdnimg.cn/65603535723a45e7a886874a214a617f.jpeg)
Elasticsearch-8.x.x安装启动后测试报错[WARN ][o.e.x.s.t.n.SecurityNetty4HttpServerTransport] [DESKTOP-0QU7RUU]
浏览器输入 IP:端口号后报错。(*默认端口号9200,自定义端口号在elasticsearch.yml文件里http.port: 自定义端口) [WARN ][o.e.x.s.t.n.SecurityNetty4HttpServerTransport] [DESKTOP-0QU7RUU] received plaintext http traffic on an https c…

HTC ONE X刷ruu的详细刷机教程
一:准备工作: 1:手机必须能用usb数据线电脑,因为是线刷,所以必须要有数据线 2:检查一下电脑,确保电脑上已经安装htc one m7的usb驱动了 2:下载ruu刷机包,下载适合一款…

测试基础|一文了解,这5种不同类别的软件测试工具都有啥用
介绍:对于任何希望确保其数字产品的质量和性能的企业来说,软件测试工具都是宝贵的资产。从桌面应用程序到Web平台,软件测试工具提供了一整套功能,可帮助开发人员在潜在问题成为代价高昂的问题之前识别并解决它们。彻底的测试变得至…
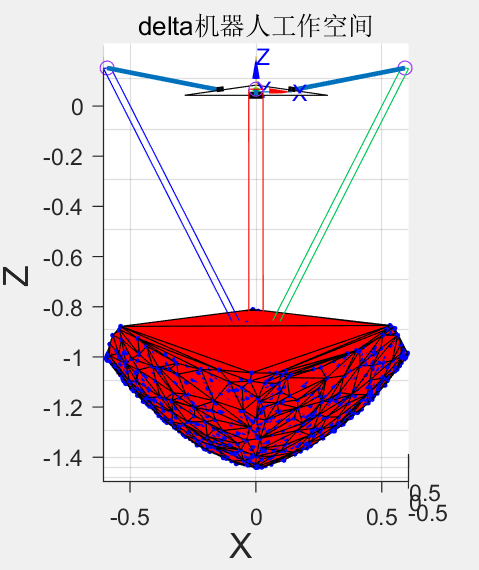
【机器人学】3-RUU-delta并联机器人正运动学、逆运动学和微分运动学
文章目录 串联和并联机器人对比delta机器人逆运动学正运动学微分运动学工作空间 串联和并联机器人对比
串联机器人和并联机器人各有优缺点。
串联机器人
优点 工作空间大;可实现的姿态多; 缺点 能量效率低,加速性差;末端负载小…

htc e9刷android6,HTC E9+刷机教程_HTC ONE E9+刷zip格式的ruu包的方法
说了有关HTC ONE E9的官方ruu包了,说的是卡刷形式了,那就是来说说咱们的这个卡刷形式的rom包怎么刷入手机吧,这个也不复杂,也不需要借助于第三方的刷机软件就可以操作了,是利用手机自带的升级系统来进行升级的…
htc x920e刷android7.0,HTC X920E (Butterfly) 刷回官方RUU固件教程
其实htc手机的线刷刷机是最容易的了,因为htc的官方包就是exe格式的,直接可以下载下来运行刷入就可以了,下面来说说HTC X920E/Droid DNA/Butterfly的具体的刷ruu的教程吧,这个教程也可以用来救砖用,如果你的手机刷机失败…

htc d826 android 6,HTC 826官方ruu固件rom包_HTC Desire 826刷机包和升级包
今天看到论坛里已经有机友分享过HTC Desire 826的固件包了,也就是大家常说ruu包,现在咱们的这个手机多数是通过ruu包来进行升级的,没有什么太复杂的,今天在这里先分享的卡刷格式的ruu包,因为线刷的ruu包还没出来,等以后出来了再给大家分享出来,在这里会一块儿更新的,不…
htc+one+m7+linux驱动,HTC One M7线刷官方ruu包的教程
上次给大家说过了卡刷的教程了,可是很多人怕刷机失败,这种情况下就只能刷回官方的ruu包了,下面就来说说HTC One/M7/801e怎么来刷回官方的的ruu固件包,由于多数的官方ruu包都是exe格式的,都是用数据线连接电脑ÿ…
激动呀,htc desire s g12 4.0 RUU包htc 官方下载地址已放出,有图为证
不多说了直接上地址 http://dl4.htc.com/RomCode/Source_and_Binaries/RUU_SAGA_ICS_35_S_HTC_EU_14.01.401.2_20.76.30.0835_3831.19.00.110_275068.zip 大小: 17.7 KB 查看图片附件