在权盛电子店里买了ZD680无人机套装,记录拼装调试的大体流程。
下面部分操作说明来源于权盛电子提供的教程。
一、配置清单
机架:ZD680,轴距680mm,机臂直径20mm,材质碳纤,载重3kg
电机:致盈X3508 ×4
电调:好盈乐天40A ×4
桨:碳纤15寸 正反桨各2个
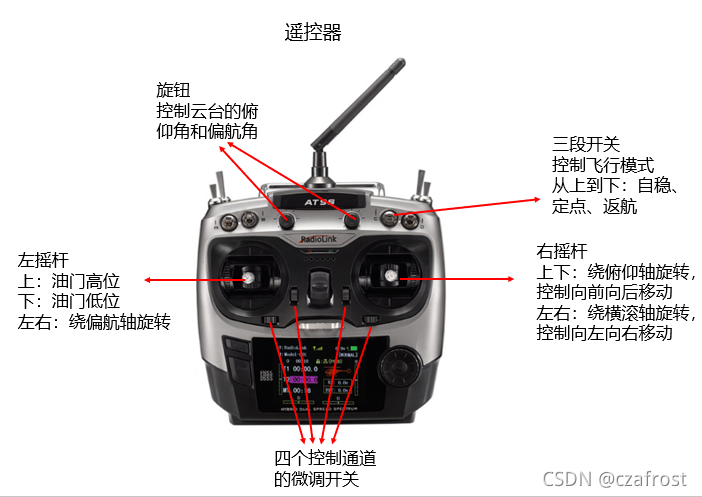
遥控器、接收机:乐迪AT9S遥控+配套接收机
电池:8000mAh 6S LiPo电池,1s=3.7V,总电压22.2V
遥控器电池:3000mAh 3S LiPo电池
飞控:pixhawk2
云台:同店 storm32无刷三轴云台
二、拼装过程
0.买之前
首先要和店家说声免焊,这样店家会帮你把分电板和电调供电线之间的触点焊好。否则就得自己焊。由于分电板还要引出12V的供电线给云台供电,所以建议没经验的就别自己弄了。
1.机架拼装
可参考视频ZD680拼装教程,拼装过程中需要六角形的螺丝刀(各种尺寸,最好买一套,包含四个)和尖嘴钳,需要提前准备。机臂上的螺丝可以拧紧一些。注意机臂那根圆管,在固定前一定要保证水平,也就是电机要正对上方。这个视频里将电调放在电机附近,多余的线剪掉再焊上。我们不要听他的,我们会把电调放到平台上。装电机的时候,有三根线那一边朝外,别装反了,后面要把这三根线从空心的机臂管里面穿出来。
一开始只用把电机、机臂、下层的平台、脚架、电池仓装好即可,上层平台别装,云台也别急着装。
2.分电板、电调固定
在这之前首先选定一个机头的朝向。脚架装好以后是在左右两侧,所以得在剩下两个方向之中选一个作为前方,记住这个方向,后面会反复用到。
机头确定后,四个机臂也规定如下,右前方的为1号。

将分电板固定在下层平台的正中心,使用粘胶即可,不用螺丝。注意方向,应该把电池的XT60插头放在机尾。
把四个电调固定在下层板的两侧,也就是脚架那块位置,尽量靠边。两两反向叠放,有字的一面冲外,找到一个角度让他俩正好能贴紧。然后将它们用塑料绑带固定在机架上,左边两个负责2号和3号电机,右边两个负责1号和4号电机。
把每个电机的三根线从空心机臂管中间穿出来,连接到电调上。电调的三根线和电机的三根线随便连接即可。整理一下走线,把该绑好的绑好。到这里应该是:分电板正负极两根供电线接到电调(这些全放在下层支撑板上)->三根电调线接电机三个接头->电机线走管子里面连到电机,同样结构重复四次。
3.飞控固定
先把飞控和减震板固定起来,用两个圆形粘胶就可以。然后把飞控+减震板固定到飞机上,这里还是用粘胶,用两层粘胶,一面粘在分电板中心空出来的位置上,一面粘在减震版底下。这里需要整理一下分电板上的线,尽量让它们靠边些,留出中间一个圆形的区域放粘胶。粘好以后把机架的上层板盖上试一下,飞控的上表面到上层板之间应该还有一点距离,距离不够的话必须要调整一下,留出几个毫米,因为飞控插上各种连接线以后还会变高一点。
注意,飞控的朝向一定要和刚才我们规定的一致,pixhawk2上箭头指向的就是机头方向。
飞控装好以后,可以把电源模块牵出来的电源线插到飞控上,接口名字是POWER。
4.接收机、安全开关、蜂鸣器固定
这三个小部件可以随意找个地方固定,我选择把接收机固定在左边的两个电调上面,高度是够的。蜂鸣器和安全开关固定在右边的两个电调上面。
接收机和飞控的连接如图,注意对应颜色线的关系

安全开关和蜂鸣器也可以接在飞控上,接口上有写名字。分别是SWITCH和BUZZER。
除了这根线以外,还要按照序号把电调的信号线接到飞控上。具体规则是,飞控上从右往左数第7~10个插口(上面的数字也有写1234)对应了1~4号电调的线。插头的黑色线在上,白色线在下。
5.GPS安装,盖上上层板
GPS会配有支架,把支架拼装起来以后上方会有一个平台,用粘胶把GPS模块粘在这里。(GPS支架安装时会用到一种特别小的螺丝,也是六角形的,但是比机架上的小两号)
注意GPS的方向,仔细看GPS上是有个小箭头的,箭头朝向和飞控朝向要严格一致,偏了会影响到后续的校准。
把GPS插口插到飞控上,把GPS支架固定在上层板上。
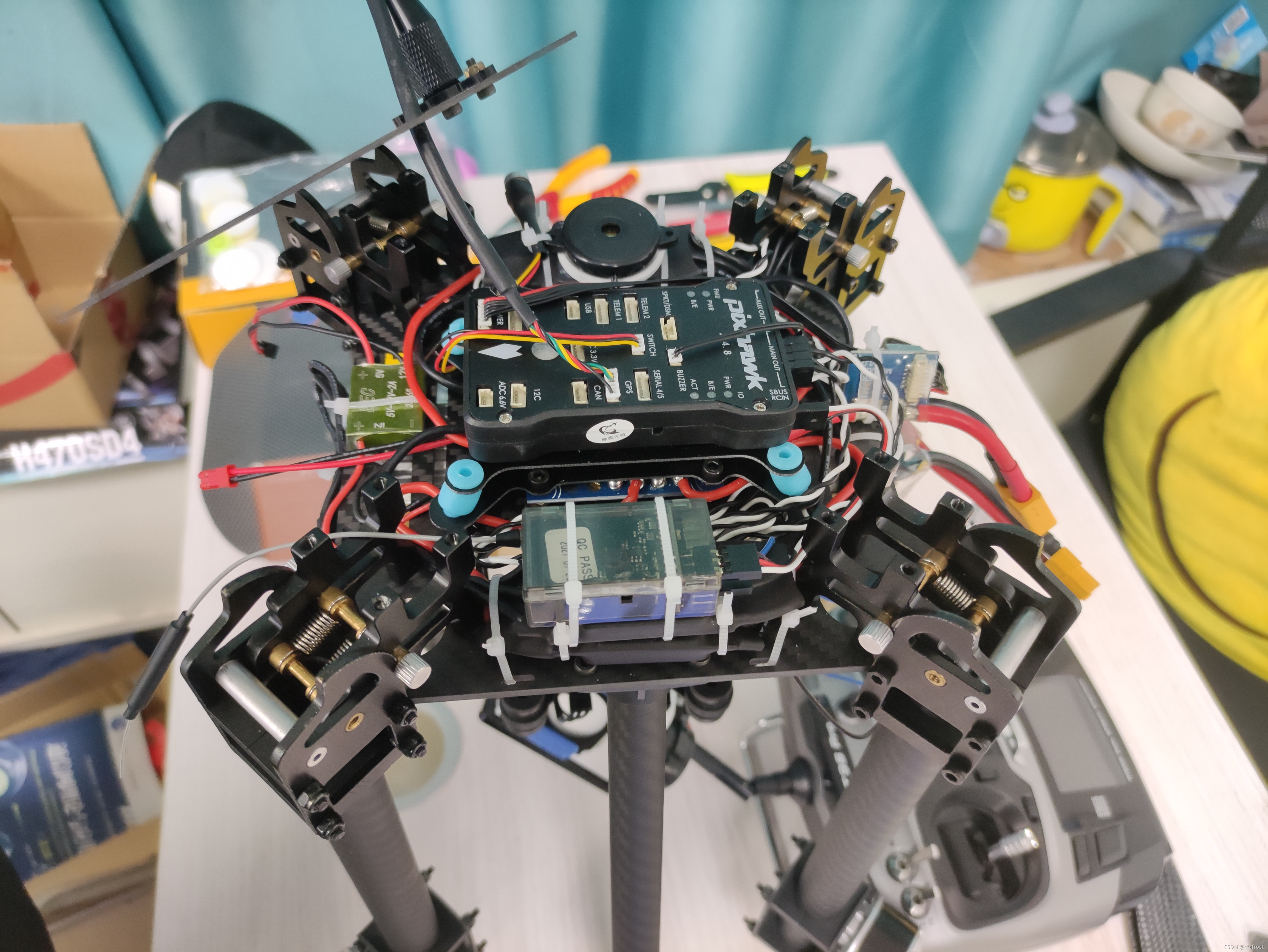
放一张安装好后的效果图。
6.桨的安装
在校准完成之前先不要安装桨。电机电调都还没有设置好,带桨测试会非常危险,这时候装上了也得拆的。考虑到桨的安装也属于拼装过程中的一部分,所以把这个内容放在这。
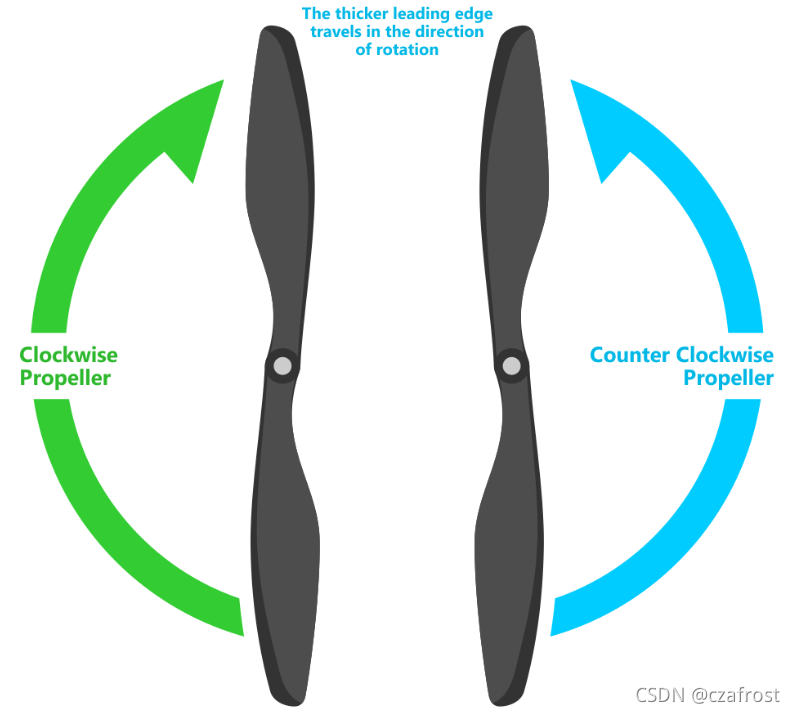
安装桨主要涉及的问题就是正桨反桨的识别问题。在手册中有相应介绍:连接电调与电机。我们固定机头方向后,四个机臂/电机/桨的编号也确定了,参见上面的那个图。其中1号和2号称为正桨,电机要逆时针旋转,3号4号称为反桨,电机要顺时针旋转。也就是说这里涉及一个电机和桨的对应问题。
桨分为两种,识别正桨/反桨的方法是看桨的迎风面。把桨竖着放平在桌上(这里有两种放法,放下来以后桨面朝上凸的是对的),只看其上半部分,会发现有一侧是翘起来的,这一侧就是迎风面,也就是需要这一面切割空气来产生升力。上半部分翘起来的在左侧,就说明这个桨应该逆时针转,他就是正桨,对应安装在1号2号位置。上半部分翘起来的在右侧,就说明这个桨应该顺时针转,他就是反桨,对应安装在3号4号位置。
三、校准与调试
把各部件固定在机架上以后要进行飞控的设置与校准、遥控器的校准等。需要用到PC端的地面站与飞控连接。这两个手册对我的帮助很大,基本按照这个来做就可以。CUAV手册,pix.1yuav手册
1.地面站简介
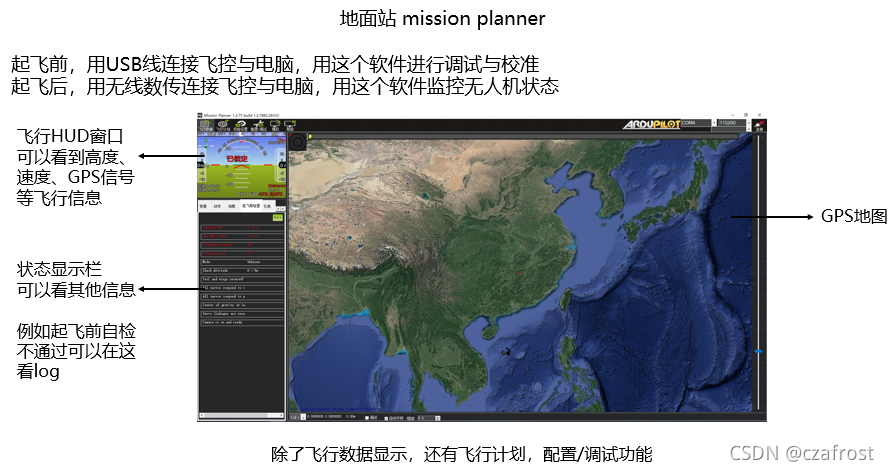
地面站是地面端用来显示飞控传回的数据的软件,起飞前可以对飞机进行调试,起飞后可以监控飞机的状态,还具有制定航线等功能。飞控和地面站的连接方式有两种,有线/无线。其中有线连接就是拿micro usb线接上飞控,另一头usb接到电脑,在第一次做调试的时候只能这样连接。而无线连接就需要依靠数传电台,起飞以后通过无线数传将飞控数据传到地面设备。
地面站有好几种,我选择了mission planner,这个软件只有windows版本。另外一种用得很多的地面站软件是QGroundControl,有windows、ubuntu、mac、ios、安卓各种版本。
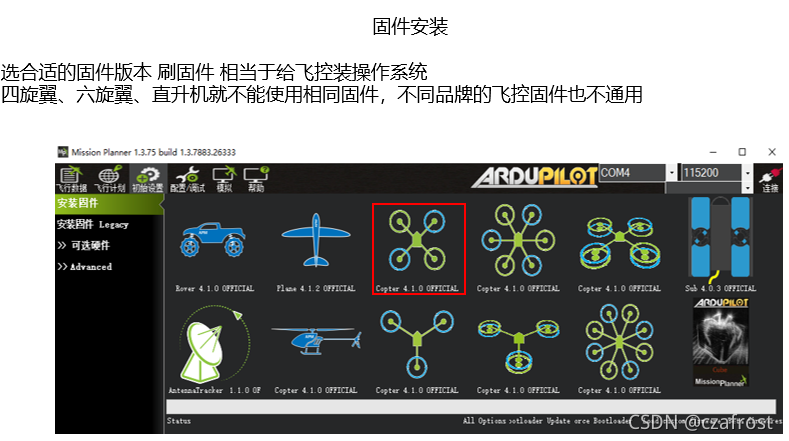
2.刷固件
用usb线连接PC和飞控,在mission planner右上角选择对应的COM口,选择波特率115200,连接。连接成功以后刷固件。初始设置->安装固件->选择四旋翼的对应图案->按照指示操作。中间会弹窗问你几个问题,百度一下,不要随意选yes。
3.校准
固件刷好后,重新插拔飞控的数据线,在软件右上角重新选择COM端口,波特率57600,连接地面站。成功后应该可以在最上方软件标题后面(Mission Planner 1.3.xx)看到你刚才刷的固件版本。
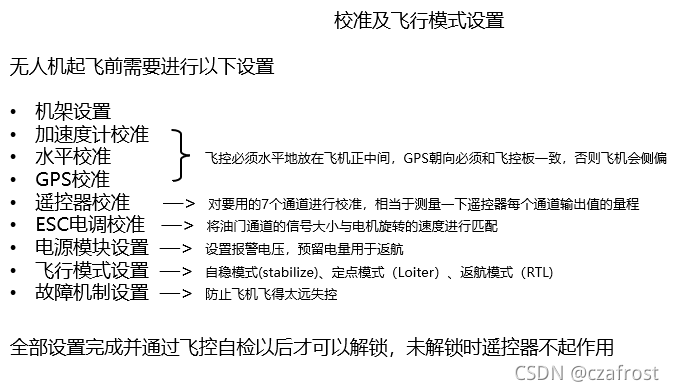
进入初始设置->必要硬件,展开的所有条目都需要依次设置。注意不要使用它自带的向导,容易校准失败。
详细步骤CUAV手册里说的很清楚。我校准时的顺序依次是机架设置->加速度计校准->指南针校准->遥控器校准->设置飞行模式->ESC电调校准->故障保护设置->电源检测模块设置
其中ESC电调校准可以参考这里。
4.遥控器
上一步涉及遥控器校准,在那之前我们得知道遥控器怎么用。
首先AT9S遥控器开机前一定要把左摇杆打到最下方,不然会报错不让你开。
进"parameter"把语言改成中文
进"机型选择",把机型调整为多旋翼模型
进"舵机相位",把第三通道:油门改为反相
进"失控保护",把油门通道的摇杆打到最低,油门通道的微调开关也打到最低,然后光标选到油门通道,按确定。右边的15%会变为3%。回主界面,将油门通道的微调开关打回0。
进"辅助通道",进“五通姿态选择”,三段开关从上到下的模式设为自稳、定点、返航。
遥控器校准之前,要确认接收机和飞控已经接好,且接收机已调到SBUS模式(蓝色灯)。否则得拿个尖东西把接收机上的开关按两下。
遥控器校准时应把所有要用的7个通道都打到最大和最小值。
遥控器的解锁手势为:油门最低,YAW方向最右,也是就左边摇杆打到右下角
5.起飞前的准备
如果所有的校准都成功了,就可以解锁无人机。同样,这里不要上桨,我们还需要检查电机的转动方向。
给无人机接上电池,听到开机音乐后指示灯闪蓝色(有GPS信号时为绿色),同时电机开始滴滴响,这时可以尝试解锁。解锁分两步,首先按住飞控上接出来的安全开关,电机停止滴滴响,代表解锁完成。第二步,遥控器左边摇杆打到右下角,保持5秒。解锁完毕,电机会怠速旋转起来,代表已经准备好起飞。5秒没有新的操作,又会自动上锁,需要再次使用遥控器解锁手势解锁。
在电机怠速旋转的时候,我们观察一下电机的旋转方向,如果发现和规定的顺时针/逆时针不同,则需要断电,交换电机电调之间三根连接线的任意两根。
如果给无人机接上电池以后,飞控指示灯不是闪蓝色而是闪黄色,则说明自检不通过,前面的校准还存在bug。我们需要再去排查一下哪里出了问题。
具体方法是连接地面站, 看mission planner的左上角信息框里的红色字。再在左下角信息框里选择“消息”,尝试用遥控器解锁,观察这里输出的pre-arm报错信息。
6.云台
前面都没问题了再来调云台。
先用螺丝把云台固定在电池仓的下方。上电之前需要把负载固定好,负载不能太轻也不能太重。太轻了会导致云台一直抖动,太重了会导致电机扭力不够,初始化失败。
用12V电压供电,开机后云台会开始自稳,过程中不要碰它,直到它滴滴响,代表自稳完成。
两根PWM控制线一端连接收机,另一端连云台的控制板。控制板上有两排插针,上面一排不用管,下面一排是信号输入,从左往右数第二个插针控制俯仰,第四个插针控制横滚。遥控器上的两个旋钮分别是第6通道和第8通道,所以pwm控制线从云台下面一排的第2根针和第4根针接出,连到接收机的第6通道和第8通道的信号极(通道序号要看sbus的序号,是用蓝色字标出的)。
接好了就能用旋钮控制云台转动了。
四、其他
电源相关说明
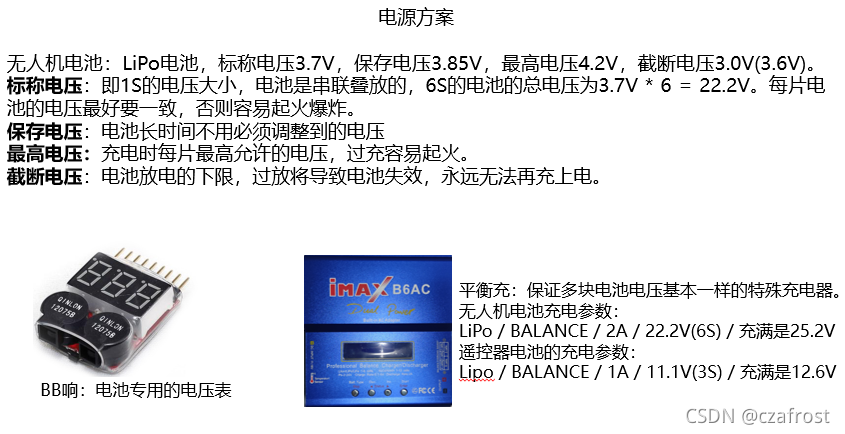
给锂电池充电时一定要做到有人值守,充电程序开始前一定要仔细检查参数设置。









![HTML总结 2[转]](https://img-blog.csdnimg.cn/c5cdd76e14484a41b468722ff9db6674.png)